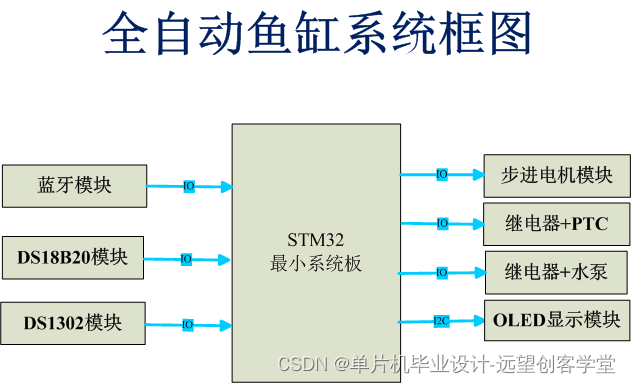
系统功能:
(1)检测并控制鱼缸水温,水温低于22℃后开启加热,高于28℃后关闭加热。
(2)定时喂食,每天12点和0点喂食一次,步进电机开启后再关闭模拟喂食。
(3)定时开启水循环,每隔一个小时开启水循环水泵一分钟。
(4)OLED显示时间,水温,加热喂食和水循环的状态。
(5)手机蓝牙显示系统状态及控制加热喂食和水循环(手动状态下)。
(6)系统分手动和自动状态,手动状态下可以通过按键和蓝牙开启加热喂食和
水循环,自动状态下根据水温自动控制加热,根据时间定时控制喂食和水循环
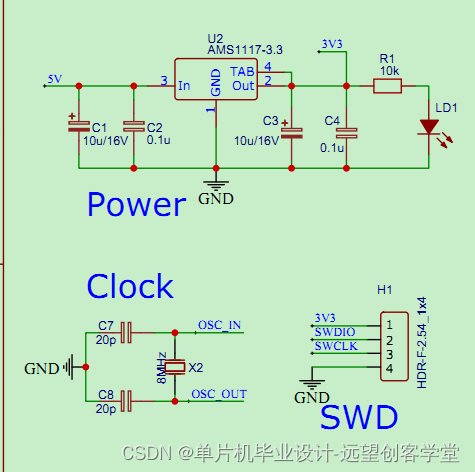
主要功能模块原理图:
电源时钟烧录接口:
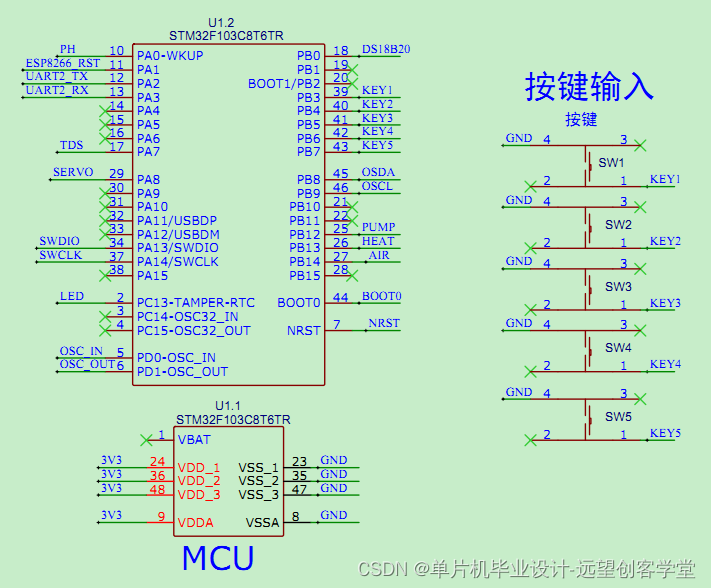
单片机和按键输入电路:
传感器采集电路:
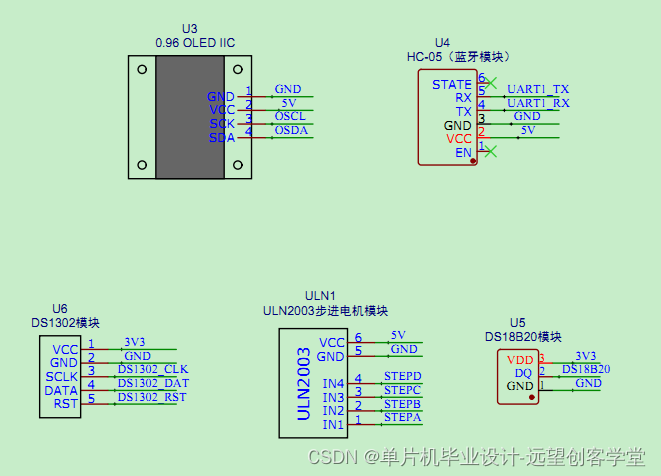
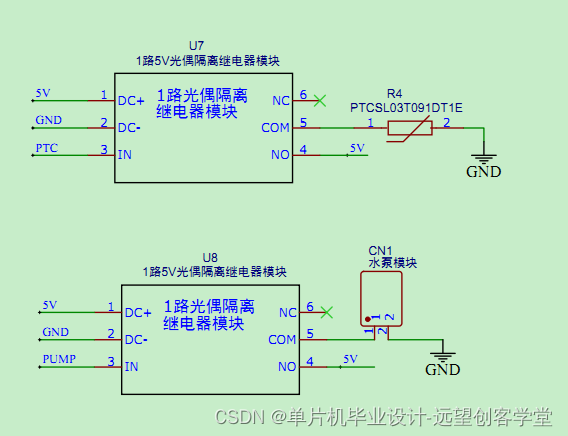
继电器电路:
资料获取地址
系统主要功能模块代码
初始化代码:
/* USER CODE BEGIN 1 */
/* USER CODE END 1 */
/* MCU Configuration--------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* USER CODE BEGIN Init */
InitVar();
/* USER CODE END Init */
/* Configure the system clock */
SystemClock_Config();
/* USER CODE BEGIN SysInit */
/* USER CODE END SysInit */
/* Initialize all configured peripherals */
MX_GPIO_Init();
MX_USART1_UART_Init();
/* USER CODE BEGIN 2 */
HAL_Delay(100);
SetUart1RxToInput();
HAL_Delay(50);
//uart1打开接收中断
HAL_UART_Receive_IT(&huart1, (uint8_t*)&uart1RecBuff, 1);
InitOled();
InitOledDisp();
//测试写DS1302时间
// TestSetTime();
DS1302_Read_Time();
if(InitDS18B20()==0)
{
// printf("%s", "DS18B20初始化成功");
//DS18B20在上电第一次读取时显示温度为85℃,这是正常的。
//85℃是DS18B20在上电复位后在温度寄存器内的对应数字量,
//这里DS18B20初始化成功后读一次值,避免出现85℃
DS18B20GetTemp_SkipRom();
}系统控制代码:
//系统信息更新
void SystemControl(void)
{
UpdateTempData();
UpdateBleData();
GetSystemTime();
GetSensorState();
FeedControl();
PumpControl();
}蓝牙模块上报系统数据:
void UpdateBleData(void)
{
static uint8_t bleCnt = 0;
//自动模式下每隔10S上报蓝牙模块
if(sysMode==SYS_MODE_MANU)
{
return;
}
bleCnt++;
if(bleCnt>=BLE_UPDATE_INTER)
{
bleCnt = 0;
//打印系统时间
printf("SysTime:%02d:%02d\r\n", getHourVal, getMinVal);
//打印温度值
printf("getTempVal:%2d\r\n", getTempVal);
//打印系统模式
if(sysMode==SYS_MODE_MANU)
{
printf("sysMode:Manual\r\n");
}
else if(sysMode==SYS_MODE_AUTO)
{
printf("sysMode:Auto\r\n");
}
}
}此设计提供的资料包含原理图PCB(包含PDF,AD,立创EDA三个版本),源代码,系统框图,主程序流程图,物料清单(包含使用到的器件手册),功能操作说明等。
各功能模块资料: