机器人阻抗是一个描述机器人与环境交互时动态特性的概念。
- 定义:
- 阻抗在机器人领域中,通常用来描述机器人与其环境之间的相互作用。当机器人与环境接触时,环境对机器人施加一个作用力,而机器人也会对环境施加一个反作用力。这个反作用力的大小和方向,就由机器人的阻抗所决定。
- 阻抗的本质:
- 阻抗的本质与电工电子学中的阻抗类似,即一个系统对流经它的给定频率下的交流电流的总抵抗能力。但在机器人领域,阻抗更多地被用来描述力学的振动系统,特别是机器人与环境之间的相互作用。
- 阻抗的建模:
- 在机器人系统中,阻抗通常被建模为二阶动态系统,即质量、阻尼、弹簧的组合。这意味着机器人的阻抗可以通过调整其质量、阻尼和弹簧特性来改变。
- 阻抗的组合类型:
- 当涉及到不同阻抗组合类型时,机器人的阻抗并不是一个固定的值。它会根据具体的组合类型以及机器人的设计、任务需求和环境条件而发生变化。例如,在某些情况下,增加阻尼可以减少在受到外部扰动时的振动;而在其他情况下,增加刚度可以提高位置控制的准确性。
- 阻抗控制的目的:
- 阻抗控制是一种通过调整机器人的阻抗来实现精准控制的方法。其目的在于控制机器人的运动及其与环境交互时的接触力。通过定义机器人的刚度和阻尼,可以控制机器人在与环境交互期间的行为方式。
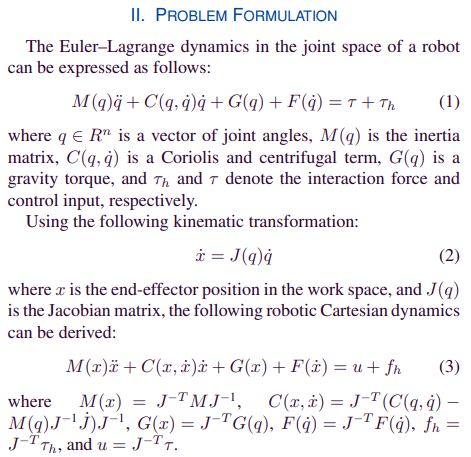
阻抗控制是一种通过调节电路或系统的阻抗来实现对电流、电压或功率的控制的方法。在机器人控制领域,阻抗控制主要用于控制机器人运动与外力之间的动态关系,使其等效为由弹簧-阻尼-质量组成的二阶系统。通过调节机器人的行为,以维持这个理想的动态关系。
为什么要进行阻抗控制:
- 提高交互安全性:阻抗控制可以使机器人在与外界环境交互时表现出一定的柔顺性,减少碰撞和损伤。
- 适应不同任务需求:通过调整阻抗参数,阻抗控制可以使机器人适应不同的任务需求,如装配、搬运等。
- 提高控制精度:阻抗控制可以实现对机器人末端执行器位置和接触力的精确控制,提高整个控制系统的精度和性能。
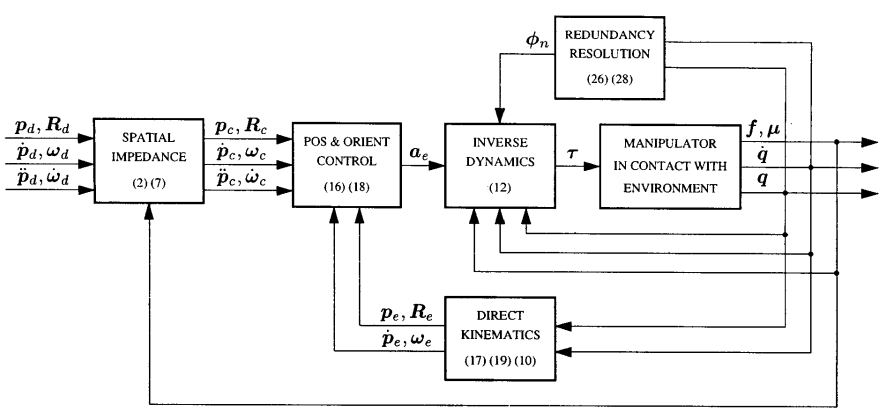
如何实现阻抗控制:
阻抗控制系统由内部的力闭环控制和外部的阻抗计算(位置控制)环节组成。具体而言,它涉及到机器人末端执行器的位置和接触力之间的动态关系,通过调整阻抗参数(如质量、阻尼、刚度)来实现顺应控制。
目前的阻抗控制实现方式分类、区别及优缺点:
- 内环基于位控的阻抗控制(导纳控制):
- 区别:这种方法主要关注位置控制,通过调整位置来间接实现力控制。
- 优点:对自由运动和约束运动之间的转换具有很强的适应性,对系统的不确定性和扰动具有较强的鲁棒性。
- 缺点:在阻抗参数较大的场合使用时容易引起系统的不稳定。
- 基于力控的阻抗控制:
- 区别:这种方法直接关注力控制,通过调整力反馈来实现阻抗控制。
- 优点:与导纳控制相反,它一般用在阻抗参数较小的场合下,对力控制精度要求较高的情况更为适用。
- 缺点:在实际中难于准确得到末端执行器的参考轨迹和环境的位置、刚度,因此既无法准确实现位置控制又无法准确实现力控制。
存在的科学问题:
- 阻抗参数的优化:如何根据具体任务需求和环境条件,优化阻抗参数以实现最佳的控制效果,是一个需要深入研究的问题。
- 阻抗控制算法的稳定性与鲁棒性:阻抗控制算法在面对不确定性和扰动时的稳定性和鲁棒性是需要解决的科学问题。
- 阻抗控制与其他控制策略的融合:如何有效地融合阻抗控制与其他控制策略,如位置控制、速度控制等,以实现更复杂的控制任务,也是一个需要研究的问题。
https://ieeexplore.ieee.org/stamp/stamp.jsp?tp=&arnumber=9985425![]() https://ieeexplore.ieee.org/stamp/stamp.jsp?tp=&arnumber=9985425
https://ieeexplore.ieee.org/stamp/stamp.jsp?tp=&arnumber=9985425

https://ieeexplore.ieee.org/stamp/stamp.jsp?tp=&arnumber=10123073![]() https://ieeexplore.ieee.org/stamp/stamp.jsp?tp=&arnumber=10123073
https://ieeexplore.ieee.org/stamp/stamp.jsp?tp=&arnumber=10123073

![]()
______________________________________
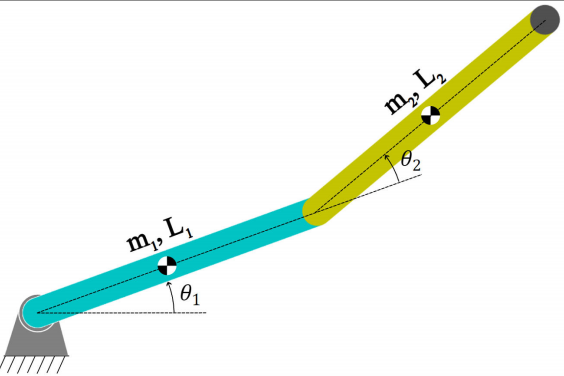
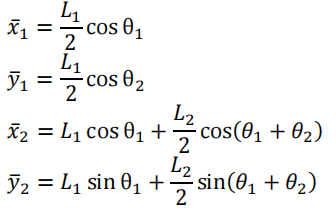




Optimal Impedance Control of A 2R Planar Robot Manipulator
_____________________________________________