读AI新生:破解人机共存密码笔记06人工智能生态系统
news2026/2/14 21:08:02
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如若转载,请注明出处:http://www.coloradmin.cn/o/1841201.html
如若内容造成侵权/违法违规/事实不符,请联系多彩编程网进行投诉反馈,一经查实,立即删除!相关文章
数据分析第十二讲 数据可视化入门(一)
数据可视化入门(一)
在完成了对数据的透视之后,我们可以将数据透视的结果通过可视化的方式呈现出来,简单的说,就是将数据变成漂亮的统计图表,因为人类对颜色和形状会更加敏感,然后再进一步解读…

ChinaTravel成流量密码,景区如何打造视频监控管理平台提升旅游体验
随着中国经济的飞速发展和人民生活水平的持续提高,旅游已经成为越来越多人休闲放松的首选方式。近期,随着互联网的普及和社交媒体的兴起,以及免签政策带火入境游,“ChinaTravel”已成为社交网络上的一大流量密码,吸引了…

数学建模基础:非线性模型
目录
前言
一、非线性方程组
二、非线性规划
三、微分方程模型
四、非线性模型的应用
五、实例示范:传染病传播模型
实例总结
五、总结 前言 非线性模型用于描述变量之间的非线性关系,相比线性模型,其数学形式更为复杂,但…

操作系统真象还原:输入输出系统
第10章-输入输出系统
这是一个网站有所有小节的代码实现,同时也包含了Bochs等文件
10.1 同步机制–锁
10.1.1 排查GP异常,理解原子操作
线程调度工作的核心内容就是线程的上下文保护+上下文恢复 。
根本原因是访问公共资源需要多个操作&…
![[Linux] 版本控制](https://img-blog.csdnimg.cn/direct/570c180e4bc14638a6fb56c6086a17e1.png)
YOLOv10改进 | 注意力篇 | YOLOv10引入EMAttention(EMA)注意力
1. EMA介绍 1.1 摘要:在各种计算机视觉任务中说明了通道或空间注意机制在产生更可辨别的特征表示方面的显着有效性。 然而,通过通道降维来建模跨通道关系可能会给提取深度视觉表示带来副作用。 本文提出了一种新型高效的多尺度注意力(EMA)模块。 着眼于保留每个通道的信息…

《Windows API每日一练》5.1 键盘基础
本节我们讲述关于键盘的一些基础知识。当我们按下一个键盘按键时,会产生一个键盘按键消息。这一点你能确定吗?假如是一个菜单快捷键消息,或者是一个子窗口控件消息呢?这就超出了本节讨论的范围,我们将在菜单和子窗口控…

零编程数据可视化展示:十个简易案例!
数据可视化是呈现数据内在价值的最终手段。数据可视化实例利用各种图表和图形设计手段,合乎逻辑地展示复杂而不直观的数据。为了让用户直观清楚地了解他们想要的数据及其比较关系,数据可视化实例的呈现至关重要。即时设计整理了10个数据可视化实例&#…
OceanBase 列存中多列过滤性能解析
今天有同事问我,列存大宽表场景下,如果在多个列上有等值过滤条件,OceanBase 的性能是不是无法满足要求? Hi 晓楚,帮评估个OTS替换场景 大概1亿大宽表,查询姿势就是任意字段的组合,进行等值查询g…
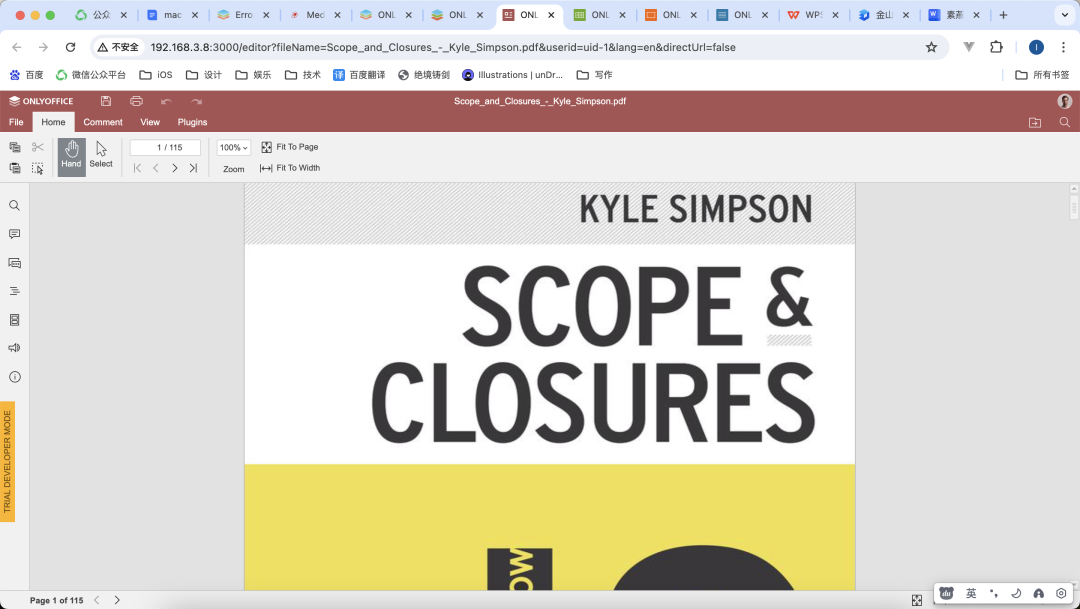
使用Docker在Mac上部署OnlyOffice,预览编辑word、excel、ppt非常好
前端编辑word、ppt文档,开源免费方案并没有找到合适的,像wps、石墨文档都是自研的方案。实现过程中wps采用的svg方案,而石墨文档采用的是canvas,它们均是自己来实现编辑器,不依赖浏览器提供的编辑器(conten…
【调试笔记-20240619-Windows-Typescripts中类型不匹配的解决方法】
调试笔记-系列文章目录
调试笔记-20240619-Windows-Typescripts中类型不匹配的解决方法 文章目录 调试笔记-系列文章目录调试笔记-20240619-Windows-Typescripts中类型不匹配的解决方法 前言一、调试环境操作系统:Windows 10 专业版调试环境调试目标 二、调试步骤搜…


【笔记】打卡01 | 初学入门
1 基本介绍
MindSpore Data(数据处理层) ModelZoo(模型库) MindSpore Science(科学计算),包含了业界领先的数据集、基础模型、预置高精度模型和前后处理工具 MindSpore Insight(可视…
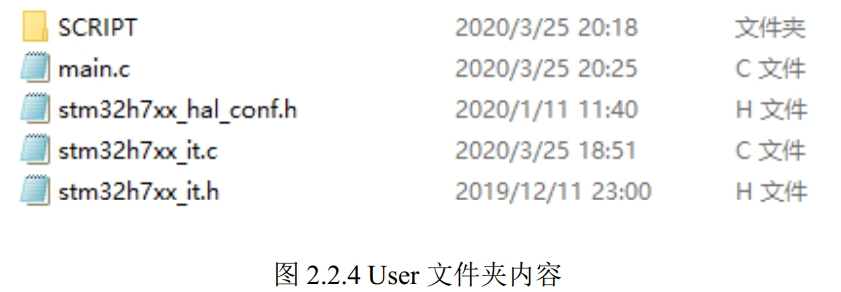
【stm32-新建工程-HAL库版本】
stm32-新建工程-HAL库版本 ■ HAL库版本目录■ Drivers■ Middlewares 文件夹, 同寄存器版本一样。■ Output 文件夹, 同寄存器版本一样。■ Projects 文件夹, 同寄存器版本一样。■ User 文件夹 ■ HAL库版本目录 ■ Drivers ① ,…
Vitis Accelerated Libraries 学习笔记--OpenCV 安装指南
目录
1. 简介
2. 安装过程
2.1 安装准备
2.2 常见错误
2.2.1 核心共享库报错
3. 通过实例测试
4. 总结 1. 简介
使用Vitis Vision Library Vitis 视觉库,为什么要安装opencv库?
在使用Vitis Vision Library时,安装OpenCV库是因为许…

前端 CSS 经典:边框转圈动画效果
前言:首先我们要知道 css 动画只对数值类的 CSS 属性起作用。要实现边框转圈动画效果,实际就是渐变背景的旋转。但是在以前,渐变背景是不支持动画的。现在我们可以利用浏览器新出的 Houdini API 来实现这个动画效果。Houdini API 特别强大&am…
leetcode119 杨辉三角②
给定一个非负索引 rowIndex,返回「杨辉三角」的第 rowIndex 行。
在「杨辉三角」中,每个数是它左上方和右上方的数的和。 示例 1:
输入: rowIndex 3
输出: [1,3,3,1]示例 2:
输入: rowIndex 0
输出: [1]示例 3:
输入: rowIndex 1
输出: [1,1] pub…
centos 7.8 安装sql server 2019
1.系统环境
centos 7.8 2.数据库安装文件准备 下载 SQL Server 2019 (15.x) Red Hat 存储库配置文件
sudo curl -o /etc/yum.repos.d/mssql-server.repo https://packages.microsoft.com/config/rhel/7/mssql-server-2019.repo 采用yum源进行不安装下载,这时yum 会自动检测…
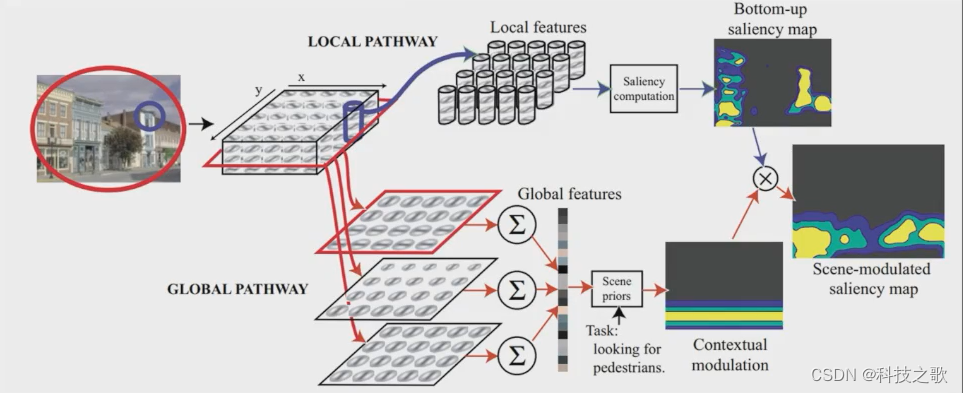
知觉感知:AI深层理解的关键
在人工智能(AI)的广阔领域中,一个核心议题始终萦绕在科学家和哲学家的心头:人工智能是否需要感知能力,以实现对意义的深层理解?这一议题不仅关乎技术的边界,更触及了人类心智的本质。从Stevan H…
![[笔记] CCD相机测距相关的一些基础知识](https://img-blog.csdnimg.cn/direct/99dd73ba615345c1b2100f48592490ee.png)
[笔记] CCD相机测距相关的一些基础知识
1.35mm胶片相机等效焦距
https://zhuanlan.zhihu.com/p/419616729
拿到摄像头拍摄的数码照片后,我们会看到这样的信息: 这里显示出了两个焦距:一个是实际焦距:5mm,一个是等效焦距:25mm。
实际焦距很容易…