前面看完了膨胀地图相关的内容,这里根据前面看过的内容手搓一张膨胀地图试一下。
1、数据预处理
第一步,先进行数据预处理,为了后续计算方便,首先在这里预先计算两张二维数组表,后续遍历时会用到这张表:
void map_test3::computeCaches()
{//Case 1:如果栅格的膨胀半径是0,那就直接返回。
if (robot_radius == 0)
return;
cached_distances_.clear(); // 分配内存
for (unsigned int i = 0; i <= 50; ++i) {
for (unsigned int j = 0; j <= 50; ++j) {
cached_distances_[i][j] = hypot(static_cast<double>(i), static_cast<double>(j));
ROS_INFO("i:%d,j:%d,value:%f",i,j,cached_distances_[i][j]);
}
}
ROS_INFO("computeCost");
cached_costs_.clear();
// 计算代价
for (unsigned int i = 0; i <= 50; ++i) {
for (unsigned int j = 0; j <= 50; ++j) {
cached_costs_[i][j] = computeCost(hypot(static_cast<double>(i), static_cast<double>(j)));
//ROS_INFO("i:%d,j:%d,value:%f",i,j,cached_costs_[i][j]);
}
}
}
这个函数内涉及到了两张表,第一张存储的是三角形的斜边长,它的意义是当前栅格在离它最近的障碍物点之间的栅格距离。而第二章表存储的是代价值,它与第一张表是相对应的,代表的是这个距离的cost值的变化。这里面还用到了一个computeCost函数,它与源码中的基本上是差不多的,只是源码中的变量weight这里暂时使用了固定值代替,但是不影响大体运行思路。
2、地图订阅与膨胀
在两张表处理完成后,接下来需要一张现有的地图,所以这里要进行一张地图的订阅与数据处理。地图的订阅比较简单,就是将数据存储到raw_data内,但是需要注意一个问题,那就是我们是不能直接对这张地图进行膨胀的,因为如果障碍物紧贴地图边缘的话,根据机器人大小向外膨胀时会超出地图边界,这样的话数据计算上会变得比较麻烦,因此,这里获取到原始数据后首先对其按照机器人大小进行膨胀,这样子后续就不用担心处理边界的问题:
void map_test3::updateBounds()
{
int length = int(robot_radius/map_resolution)+1;
ROS_INFO("length:%d",length);
for(int i=0;i<map_height+2*length;i++)
{
for(int j=0;j<map_width+2*length;j++)
{
if(i<length) //地图上边界膨胀
{
expend_data.push_back(-1);
}
else if(length <= i && i<map_height+length)
{
if(j<length)
{
expend_data.push_back(-1);
}
else if(length<=j && j<map_width+length)
{
expend_data.push_back(raw_data[map_width*(i-length)+j-length]);
}
else
{
expend_data.push_back(-1);
}
}
else
{
expend_data.push_back(-1);
}
}
}
}
updateBounds函数的中心思想还是很简单的,它只需要将原始数据按顺序保留,在地图外部扩张出一部分栅格即可,对于这些扩张出来的栅格,先可以将其设置为未知(-1)。
3、障碍物点云的提取与膨胀
这一部分的思想与上一篇中源码的思想基本上是一致的,首先提取出地图中所有的障碍物点,然后对其进行遍历,更改其占用值,当然,对于这些点而言,它的占用值是不变的,然后,下一步更新其周围四个点的数据:
void map_test3::updateCosts()
{
int length = int(robot_radius/map_resolution)+1;
int seen_size_ = (map_height+2*length) * (map_width+2*length);
if (seen_ == NULL) {// seen_的阵列为空,重新赋值
ROS_WARN("InflationLayer::updateCosts(): seen_ array is NULL");
int seen_size_ = (map_height+2*length) * (map_width+2*length);
seen_ = new bool[seen_size_]();
}
else if (seen_size_ != (map_height+2*length) * (map_width+2*length))
{
ROS_WARN("InflationLayer::updateCosts(): seen_ array size is wrong");// seen_的阵列为错误,删除后重新赋值
delete[] seen_;
seen_size_ = (map_height+2*length) * (map_width+2*length);
seen_ = new bool[seen_size_]();//这里分配了一个size 和master map 尺寸一样的bool 数组
}
else
{
if (seen_)
delete[] seen_;
seen_size_ = (map_height+2*length) * (map_width+2*length);
seen_ = new bool[seen_size_]();
}
inflation_cells_.clear();
inflation_cells.clear();
map_seen.clear();
for (int i = 0; i < map_height+2*length; i++)
{
for (int j = 0; j < map_width+2*length; j++)
{
int index = i*(map_width+2*length)+j; //1)从master_grid地图获取(i,j)对应的索引index
unsigned char cost = expend_data[index]; //2)从master_grid地图获取索引对应的代价cost
if (cost == 100) //3)先判断代价是否等于致命障碍物对应的代价,如果是,压入
{ //注意这里的obs_bin是一个指针,数据其实是存储在inflation_cells_下
//std::map<double, std::vector<CellData> > inflation_cells_;
CellData celldata;
celldata.index_ = index;
celldata.src_x_ = i;
celldata.src_y_ = j;
celldata.x_ = i;
celldata.y_ = j;
inflation_cells_[0].push_back(celldata);
inflation_cells.push_back(celldata);
}
}
}
//根据膨胀队列,进行膨胀
//通过上面的操作,现在inflation_queue_里面全部都是obstacle cell,这些cell被打包成CellData类型,包含了这些cell本身的索引,最近障碍物的索引(即它们本身),距离(0)
std::map<double, std::vector<CellData> >::iterator bin;
int count = 0;
int interate = 0;
while(inflation_cells.size()>0)// && count<12000)
{
CellData cell;
cell = inflation_cells[0];
//记录该celldata的索引index
unsigned int index = cell.index_;
// ignore if already visited 如果已访问过,则忽略
if (seen_[index])
{
//ROS_INFO("index: %d has been seen",index);
inflation_cells.erase(inflation_cells.begin());
continue;
}
seen_[index] = true;
map_seen[index] = true;
//得到该cell的坐标和离它最近的障碍物的坐标
unsigned int mx = cell.x_;
unsigned int my = cell.y_;
unsigned int sx = cell.src_x_;
unsigned int sy = cell.src_y_;
//ROS_INFO("mx:%d,my:%d,src_x:%d,src_y:%d",mx,my,sx,sy);
//4)更新膨胀队列中点的cost 值
//根据该CELL与障碍的距离来分配cost
unsigned char cost = costLookup(mx, my, sx, sy);
unsigned char old_cost = expend_data[index]; //从master_grid查找指定索引index的代价
//如果old_cost无信息或者cost≥内接膨胀障碍物,将cost更新到master_array
if (old_cost == NO_INFORMATION && (inflate_unknown_ ? (cost > FREE_SPACE) : (cost >= INSCRIBED_INFLATED_OBSTACLE)))
expend_data[index] = cost;
else//否则比较新旧大小,将大的cost更新到master_array
expend_data[index] = std::max(old_cost, cost);
ROS_INFO("index:%d",index);
// attempt to put the neighbors of the current cell onto the inflation list
//上面首先从inflation_cells_中取出最大distance的cell,再将这个cell的前后左右四个cell都塞进inflation_cells_。
//由于下面关于enqueue的调用,最后两个参数(sx, sy)没有改变,所以保证了这个索引一定是obstacle cell。
//由于在 enqueue入口会检查 if (!seen_[index]),这保证了这些cell不会被重复的塞进去。
//由于这是一个priority queue,因此障碍物的周边点,每次都是离障碍物最远的点被弹出,并被检查,这样保证了这种扩张是朝着离障碍物远的方向进行。
//尝试将当前单元的邻居(前后左右)放到队列中
//ROS_INFO("COUNT:%d",count);
//if (mx > 0 && count<1000)
if (mx > 0)
enqueue(index - 1, mx - 1, my, sx, sy);
if (my > 0)
enqueue(index - (map_width+2*length), mx, my - 1, sx, sy);
if (mx < (map_width+2*length) - 1)
enqueue(index + 1, mx + 1, my, sx, sy);
if (my < (map_height+2*length) - 1)
enqueue(index + (map_width+2*length), mx, my + 1, sx, sy);
inflation_cells.erase(inflation_cells.begin());
}
}
这个函数的中心在于while循环以及循环内的enqueue函数,enqueue函数是非常重要的一个函数,它的主要内容如下:
inline void map_test3::enqueue(int index, unsigned int mx, unsigned int my,
unsigned int src_x, unsigned int src_y)
{
if (!seen_[index])
{
// we compute our distance table one cell further than the inflation radius dictates so we can make the check below
//找它和最近的障碍物的距离,如果超过了阈值,则直接返回
//如果不超过阈值,就把它也加入inflation_cells_数组里
double distance = distanceLookup(mx, my, src_x, src_y);
// we only want to put the cell in the list if it is within the inflation radius of the obstacle point
if (distance*map_resolution > robot_radius)
return;
// push the cell data onto the inflation list and mark
CellData celldata;
celldata.index_ = index;
celldata.x_ = mx;
celldata.y_ = my;
celldata.src_x_ = src_x;
celldata.src_y_ = src_y;
inflation_cells_[distance].push_back(celldata);
inflation_cells.push_back(celldata);
}
}
在enqueue函数中会判断当前点到最近障碍物的距离。如果处于一个危险范围内(distance*map_resolution < robot_radius)则会将该点加入到遍历的队列,后续会根据点到障碍物点的距离更新其代价值,如果这个点离障碍物足够远则可以认为当前这个点是足够安全的,则不需要更新该点,通过这种方式,可以将所有离障碍物点足够近的点都遍历一遍,并修改这些点的占用值为合适的数据。
地图的重新发布
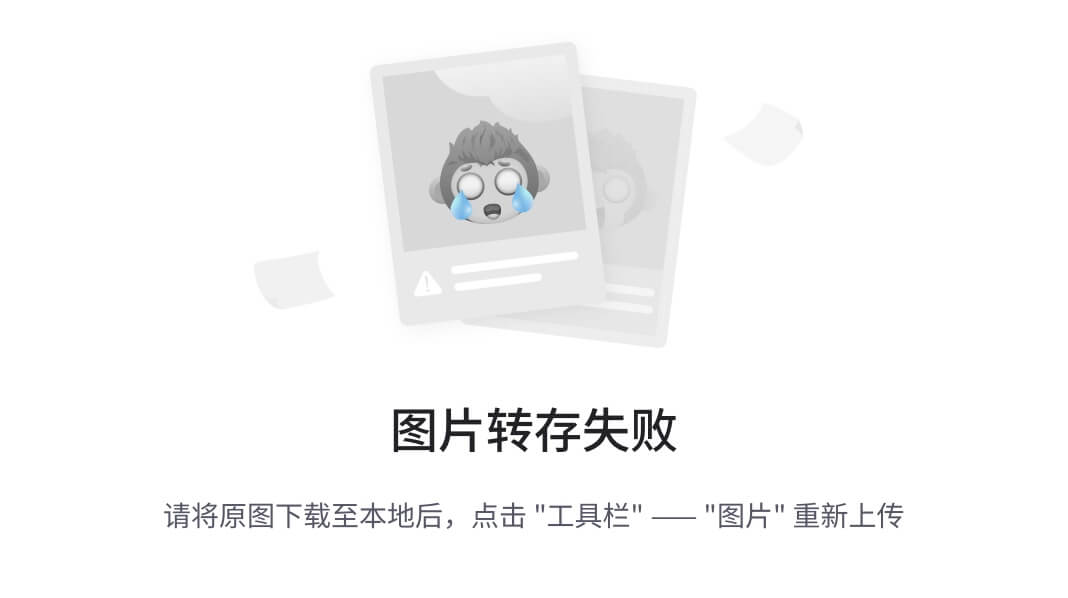
在经过第三步的遍历后,也就修改完成了所有栅格点的占用数值,然后,我们将其重新发布出来,得到一张处理后的地图,类似于如下状态:

后续就可以在这张地图上进行进一步的处理,例如结合障碍物地图以及路径规划实现半动态的路径规划:

小结
通过地图的遍历以及每个点到障碍物的距离与代价值一一对应,可以在一次遍历下完成地图的膨胀,整体来说算法的效率还是比较高的。通过该部分算法再结合激光点云以及其他算法,可以实现很多需要的功能,例如全局路径规划等。