目录
1.1位置信息和位置服务
1.1.1位置信息
1.1.2位置服务
1.2主流定位系统
1.2.1卫星定位系统(Satellite Positioning Systems)
1.2.2移动通信蜂窝基站定位(Cellular Triangulation or Advanced Forward Link Trilateration)
1.2.3无线室内环境定位(Indoor Wireless Positioning)
1.2.4网络定位:无线AP定位(Wireless Access Point Positioning)
1.2.5RFID定位(Radio Frequency Identification)
1.3定位技术
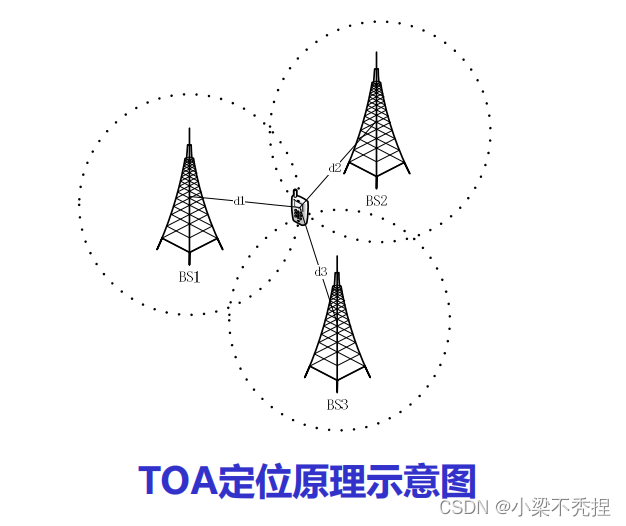
1.3.1 基于距离的定位(ToA,Time of Arrival)
1.3.1.1距离测量方法
1.3.1.2位置计算方法
1.3.2基于距离差的定位(TDoA,Time Difference of Arrival)
1.3.2.1距离差测距方法
1.3.3基于信号特征的定位(RSS,Received Signal Strength)
1.4GPS卫星定位技术
1.4.1GPS定位原理
1.4.2GPS的系统组成
1.4.3世界主要卫星定位系统
1.4.4北斗卫星导航系统
1.5移动通信蜂窝定位技术
1.6基于RFID的定位技术
1.7致谢
1.1位置信息和位置服务
1.1.1位置信息
1.1.2位置服务
移动互联网、智能手机与卫星定位技术的应用带动了基于位置的服务( LBS)的发展
• 位置服务是通过运营商的移动通信网或卫星定位系统获取移动数字终端位置信息,在地理信息系统GIS平台支持下,为用户提供的一种增值服务
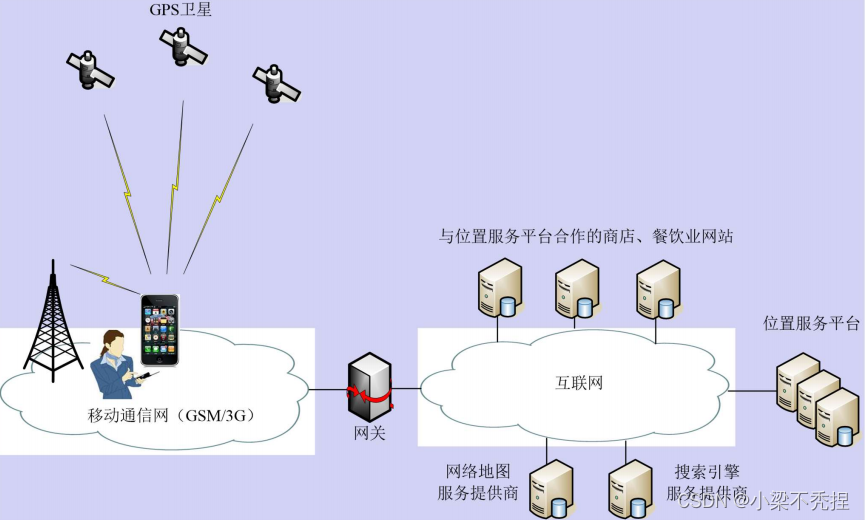
• 位置服务两大功能是:确定你的位置,提供适合你的服务
1.2主流定位系统
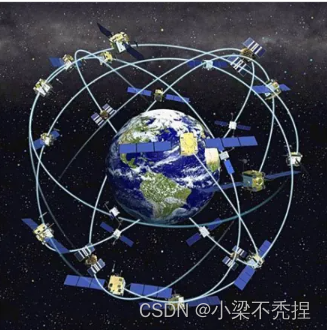
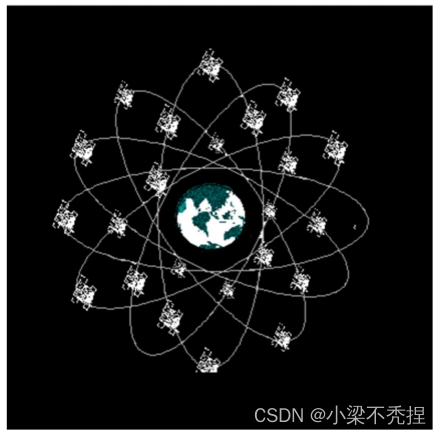
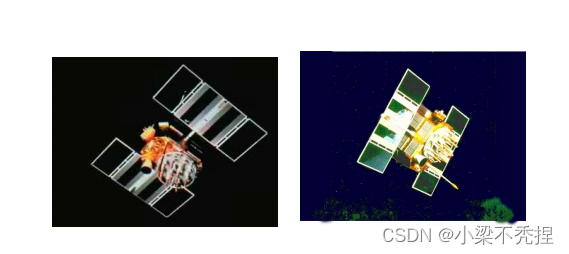
1.2.1卫星定位系统(Satellite Positioning Systems)
最著名的卫星定位系统是全球导航卫星系统(GNSS),它包括多个全球及区域性的系统,如美国的GPS(全球定位系统)、俄罗斯的GLONASS(格洛纳斯)、中国的北斗卫星导航系统(BDS)以及欧盟的Galileo等。这些系统通过在地球轨道上部署的卫星网络向地面设备发送精确的时间信号,用户设备接收到多个卫星的信号后,通过计算信号到达的时间差来确定自身的位置、速度和时间信息。卫星定位系统具有全球覆盖、高精度、全天候工作的特点,广泛应用于导航、测绘、农业、交通、军事等领域。
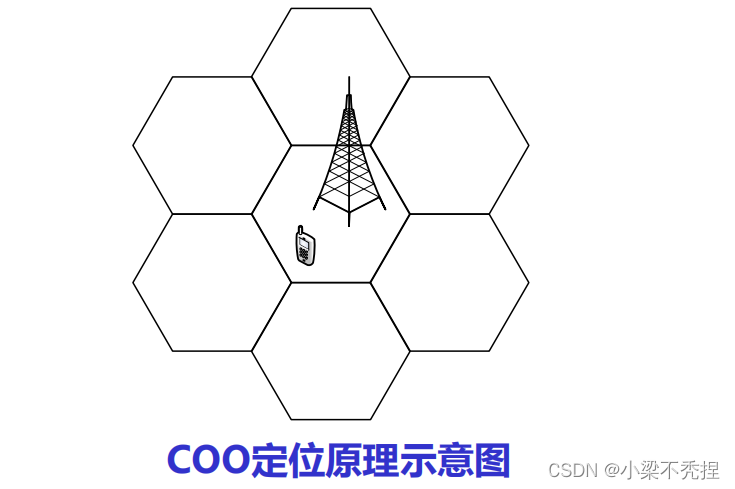
1.2.2移动通信蜂窝基站定位(Cellular Triangulation or Advanced Forward Link Trilateration)
利用移动通信网络中的基站来确定移动设备的位置。手机或其他移动设备连接到最近的几个基站,通过测量信号强度和到达时间差,采用三角测量或多边定位法计算出设备的大致位置。这种定位方式不需要特殊硬件支持,只要有手机信号即可工作,但精度通常比卫星定位低,尤其是在城市密集地区信号反射和干扰较多的情况下。适用于紧急服务响应、位置服务(LBS)等场景。

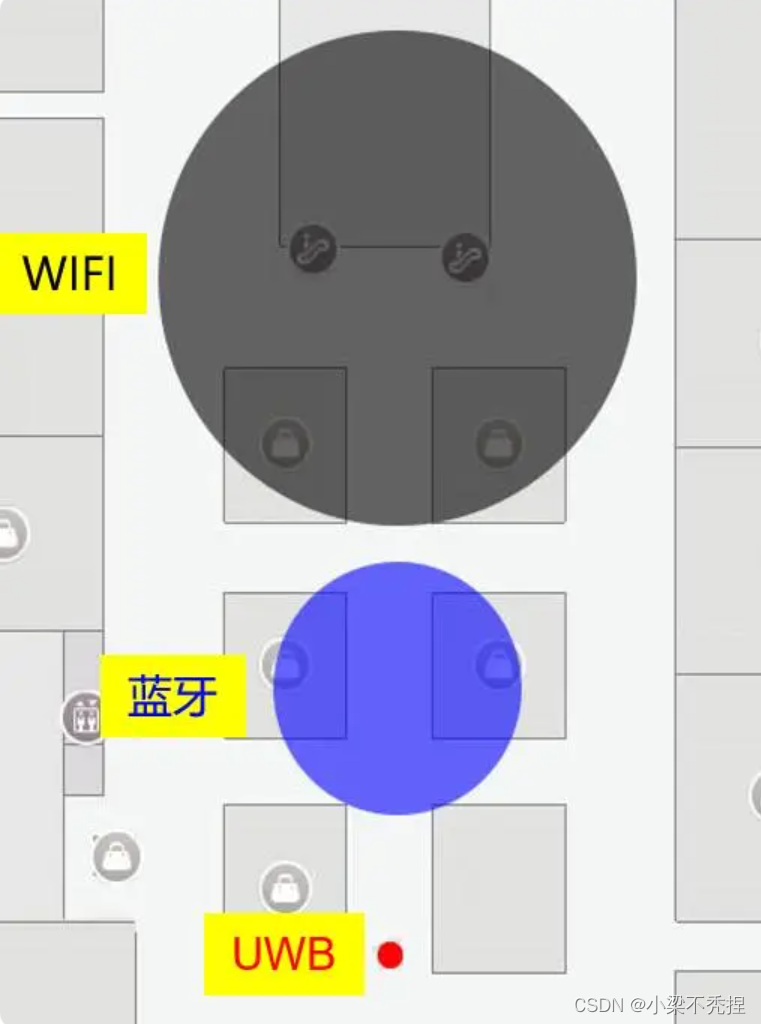
1.2.3无线室内环境定位(Indoor Wireless Positioning)
针对卫星信号在室内较难接收到的问题,开发了多种室内定位技术,如Wi-Fi定位、蓝牙信标(Beacon)定位等。Wi-Fi定位是通过检测设备连接或扫描到的已知Wi-Fi接入点信号强度,结合事先构建的Wi-Fi热点位置数据库来估算位置。蓝牙信标则是在特定位置布置低功耗蓝牙发射器,设备通过接收信标的信号强度或信号到达时间来确定位置,常用于商场、机场等大型室内场所的导航和位置服务。
1.2.4网络定位:无线AP定位(Wireless Access Point Positioning)
类似于无线室内环境定位中的Wi-Fi定位,无线AP定位也是基于已知无线接入点的位置来确定设备位置。这种方法依赖于大量已知Wi-Fi AP的位置数据库,通过比较设备检测到的AP列表与数据库记录,计算出最可能的位置。此技术广泛应用于城市环境中的定位服务。
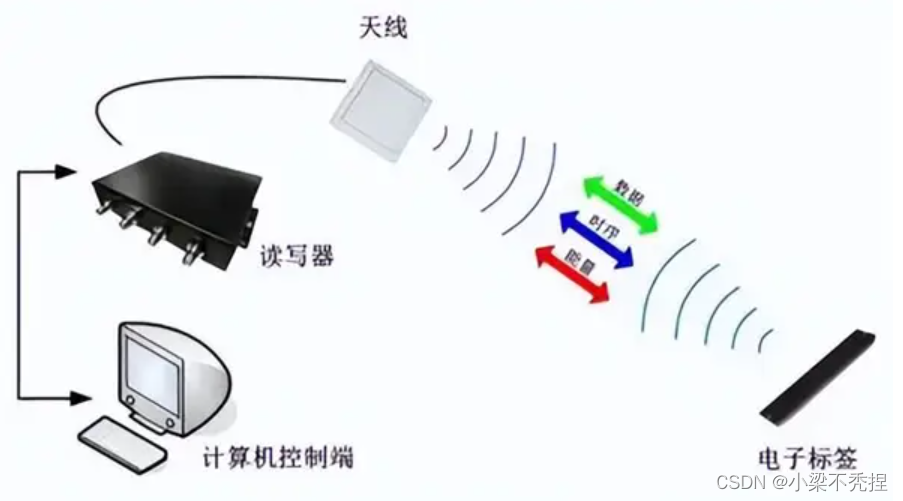
1.2.5RFID定位(Radio Frequency Identification)
RFID是一种利用射频信号进行自动识别的技术,常用于物品跟踪和资产管理。在定位方面,通过在特定位置部署RFID阅读器,当带有RFID标签的物体进入阅读器的读取范围内时,可以记录下该标签的信息和时间,从而确定物体的位置。RFID定位适用于仓库管理、医疗设备追踪、零售库存控制等场景,其优点在于非视线也能工作,但定位精度和范围取决于阅读器的布局和标签的数量。
1.3定位技术
定位技术的关键:
• 有一个或多个已知坐标的参考点
• 得到待定物体与已知参考点的空间关系
定位技术的两个步骤:
测量物理量→根据物理量确定目标位置
常见定位技术:
• 基于距离的定位(ToA,Time of Arrival)
• 基于距离差的定位(TDoA,Time Difference of Arrival)
• 基于信号特征的定位(RSS,Received Signal Strength)
1.3.1 基于距离的定位(ToA,Time of Arrival)
1.3.1.1距离测量方法
1.3.1.2位置计算方法
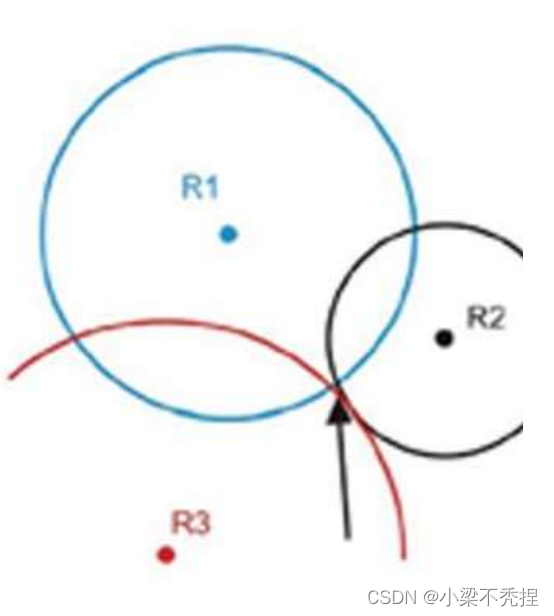
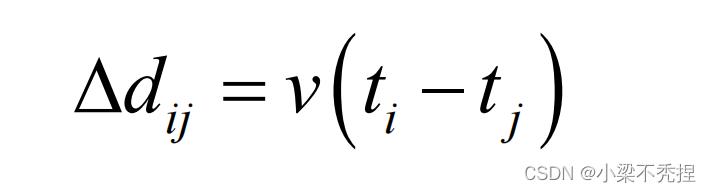
1.3.2基于距离差的定位(TDoA,Time Difference of Arrival)
1.3.2.1距离差测距方法

1.3.3基于信号特征的定位(RSS,Received Signal Strength)

1.4GPS卫星定位技术
1.4.1GPS定位原理

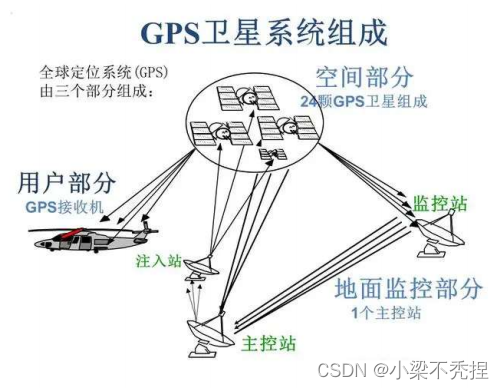
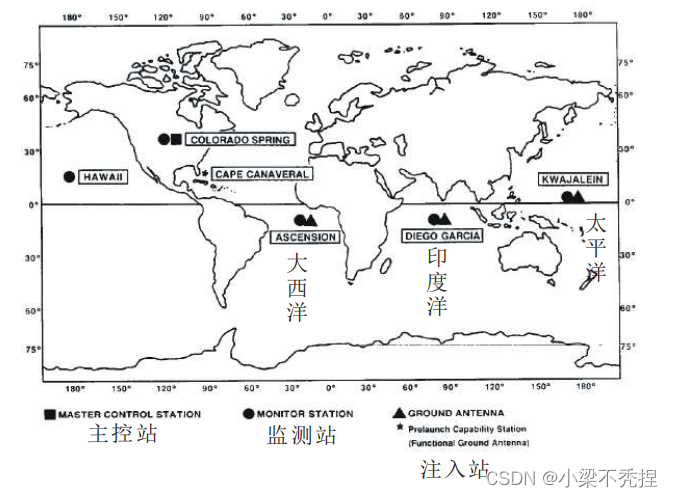
1.4.2GPS的系统组成





1.4.3世界主要卫星定位系统
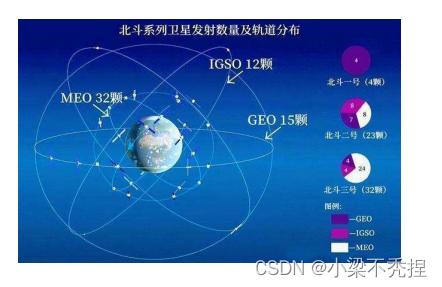
1.4.4北斗卫星导航系统
北斗卫星导航系统是中国着眼于国家安全和经济社会发展需要,自主建设、独立运行的卫星导航系统,是为全球用户提供全天候、全天时、高精度的定位、导航和授时服务的国家重要空间基础设施。


1.5移动通信蜂窝定位技术
1.6基于RFID的定位技术
基于RFID(Radio Frequency Identification,无线射频识别)的定位技术是一种利用RFID系统进行位置确定的方法。RFID系统通常由三部分组成:RFID标签(Tag)、RFID阅读器(Reader)和后台管理系统。RFID标签附着在待定位的目标上,阅读器通过无线信号与标签通信,获取标签信息。
1.7致谢
后续会陆续更新分享物联网技术课程相关知识,大家可以关注留言哈!希望可以和大家一起学习物联网技术,感受物联网技术的魅力!作者水平有限,不足之处还请大家批评指正!希望能和大家一起进步哟