在高精度伺服控制中,前馈控制可用来提高系统的跟踪性能。经典控制理论中的前馈控制设计是基于复合控制思想,当闭环系统为连续系统时,使前馈环节与闭环系统的传递函数之积为1,从而实现输出完全复现输入。利用前馈控制的思想,针对PID控制设计了前馈补偿,以提高系统的跟踪性能,其结构如图1所示。
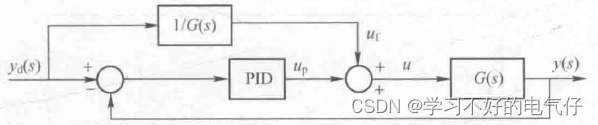
图1 PID前馈控制结构
仿真实例:
被控对象为:

输入信号为yd(k)=0.5sin(6Tt),采样时间为1ms。

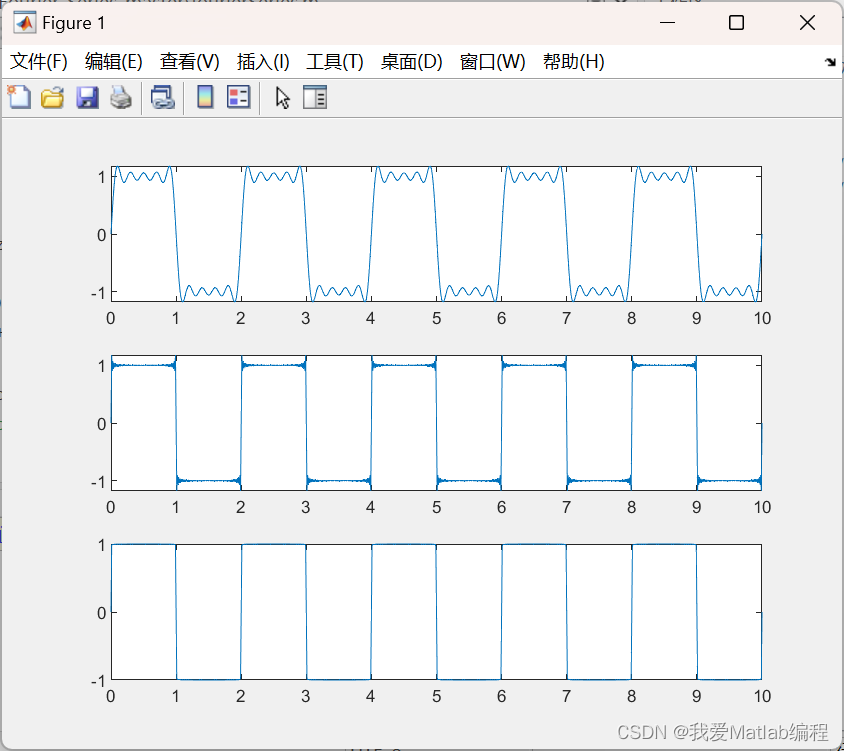
只采用PID正弦跟踪控制方法的结果如图2所示。采用前馈PID控制方法的跟踪结果如图3所示。可见通过前馈补偿可大大提高系统的跟踪性能。
本方法的不足之处是需要被控对象的精确模型。
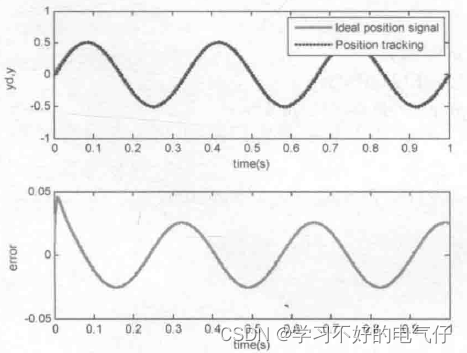
图1 PID正弦跟踪及跟踪误差(M=1)
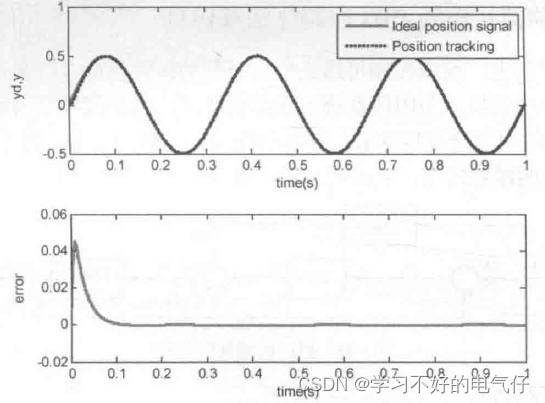
图2 PID+前馈补偿正弦跟踪及跟踪误差(M=2)
仿真程序:
clear all;close all;
ts=0.001;
sys=tf(133,[1,25,0]);
dsys=c2d(sys,ts,Z);
[num,den]=tfdata(dsys,'v);
u_1=0;u_2=0;
y_1=0;y_2=0;
error_1=0;ei=0;
for k=1:1:1000
time(k)=k*ts;
A=0.5;F=3.0;
yd(k)=A*sin(F*2*pi*k*ts);
dyd(k)=A*F*2*pi*cos(F*2*pi*k*ts);
ddyd(k)=-A*F*2*pi*F*2*pi*sin(F*2*pi*k*ts);
%Linear model
y(k)=-den(2)*y1-den(3)*y_2+num(2)*u_1+num(3)*u_2;
error(k)=yd(k)-y(k);
ei=eiterror(k)*ts;
up(k)=80*error(k)+20*ei+2.0*(error(k)-error_1)/ts;
uf(k)=25/133*dyd(k)+1/133*ddyd(k);
M=2;
if M==1
%Only using PID
u(k)=up(k);
elseif M==2 %PID+Feedforward
u(k)=up(k)+uf(k);
end
if u(k)>=10
u(k=10;end
ifu(k)<--10
u(k=-10;end
u_2=u_1;u_1=u(k);y_2=y_1;y_1=y(k);error_1=error(k);
end
figure(1);subplot(211);
plot(time,yd,'r,time,y,'k:' linewidth',2);xlabel('time(s)');ylabel('yd,y');
legend('ldeal position signal' 'Position tracking):subplot(212);
plot(time,error,'r,'linewidth',2);xlabel('time(s)';ylabel('error');figure(2);
plot(time,up,'k', timeuf,'b',time,u.'r'linewidth1,2);xlabel('time(s)');ylabel('up,uf,u');
![剑指 Offer 05. 替换空格 [C语言]](https://img-blog.csdnimg.cn/68bd8603db1d488e854e8a25f597e9f5.png)