一、PID_Compact 指令管脚介绍
做仿真前,肯定要对主角有一定了解才能够按我们需要的去控制。
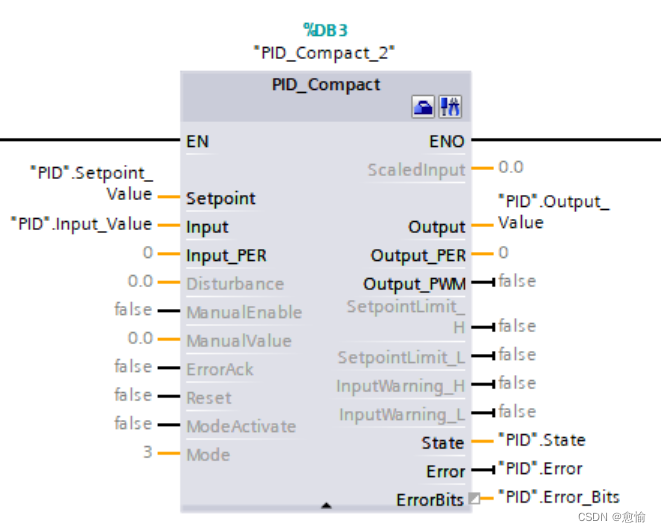
主要管脚介绍:
输入参数:
setpoint:自动模式下的用户设定值;
input:实际反馈值,非模拟量;
input_PER:实际反馈值,模拟量;
manualEnable:手动/自动模式允许;
manualValue:手动模式下输入值;
mode:PID运行模式(0=未激活,1=预调节,2=精确调节,3=自动模式,4=手动模式)
输出传输:
output:当前输出值(例如阀门开启的程度0-100);
output_PER: 当前输出值的模拟量(0-27648);
error:是否有错误报警;
其实说了这么多的管脚,主要使用到5个管脚变量:setpoint、input、input_PER、output、output_PER
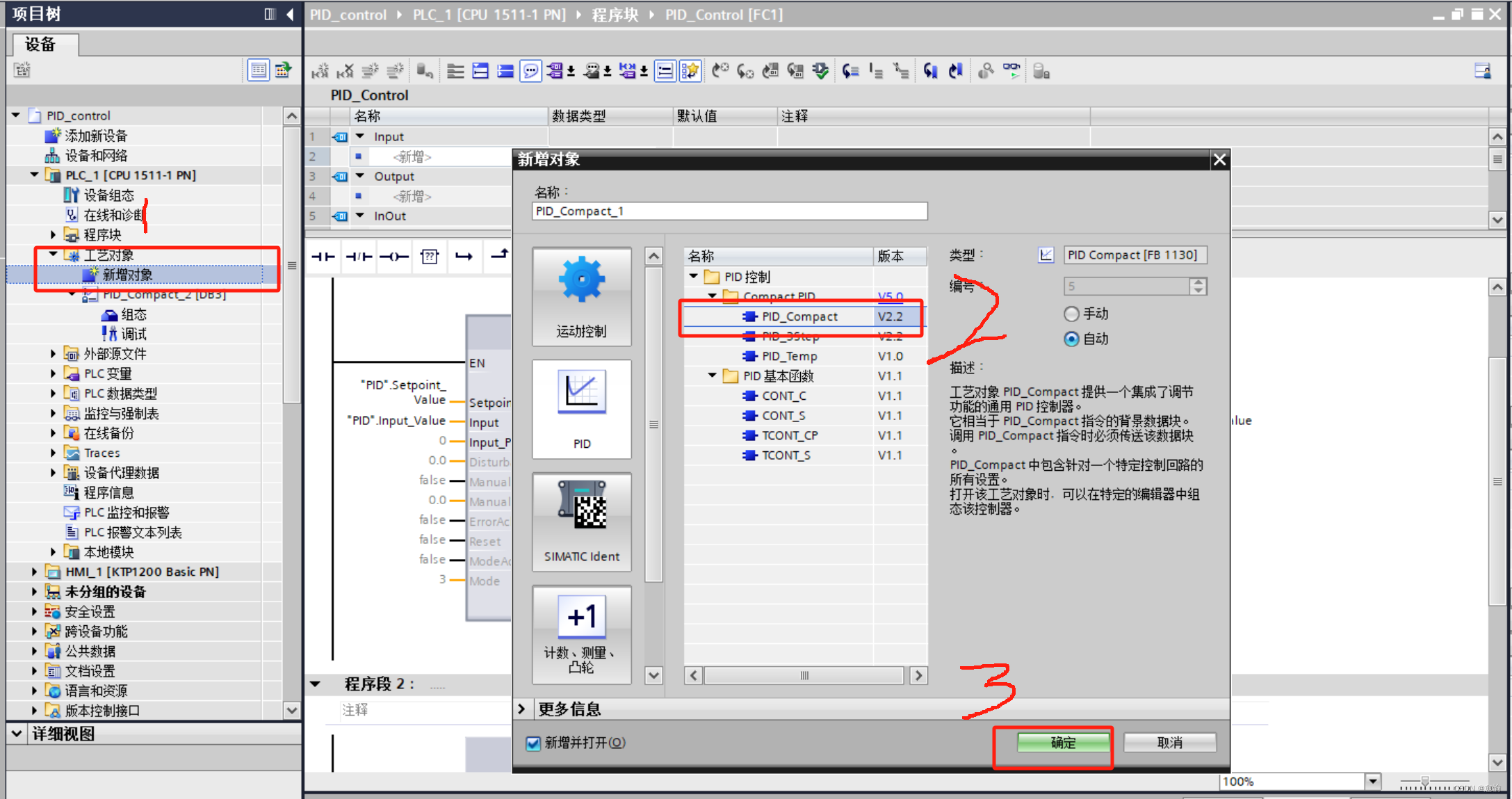
二、PID指令块组态
组态好后,还不能进行仿真,因为这个时候我们没有实际可变的反馈值给PID,不然就会出现PID输出值不变的状态。 那么就需要有一个可以模仿现实中我们使用的温度计等测量温度的功能块。
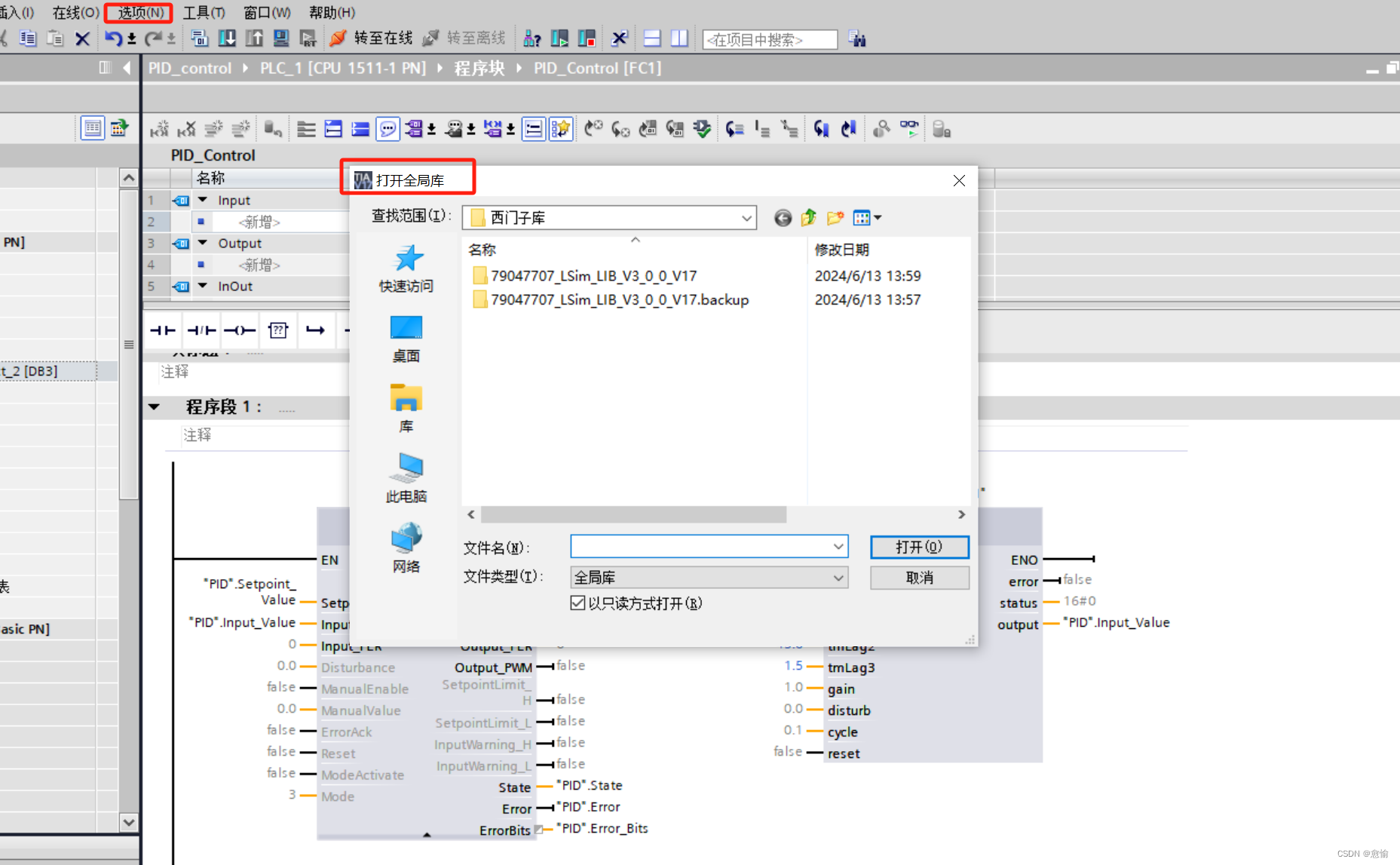
三、LSim库
这个库里有一个功能块可以实现我所说的那个温度计效果。
该库的下载方式有:
1、该文档顶部绑定了V17的LSim库;
2、LSim库的下载链接
下载好后,通过添加库,将下载好的库加载进入博图
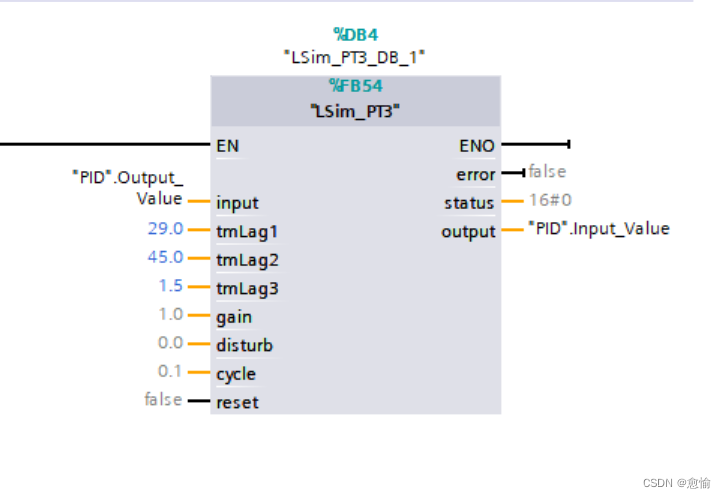
LSim_PT3的功能块组态:
四、最终组态完成
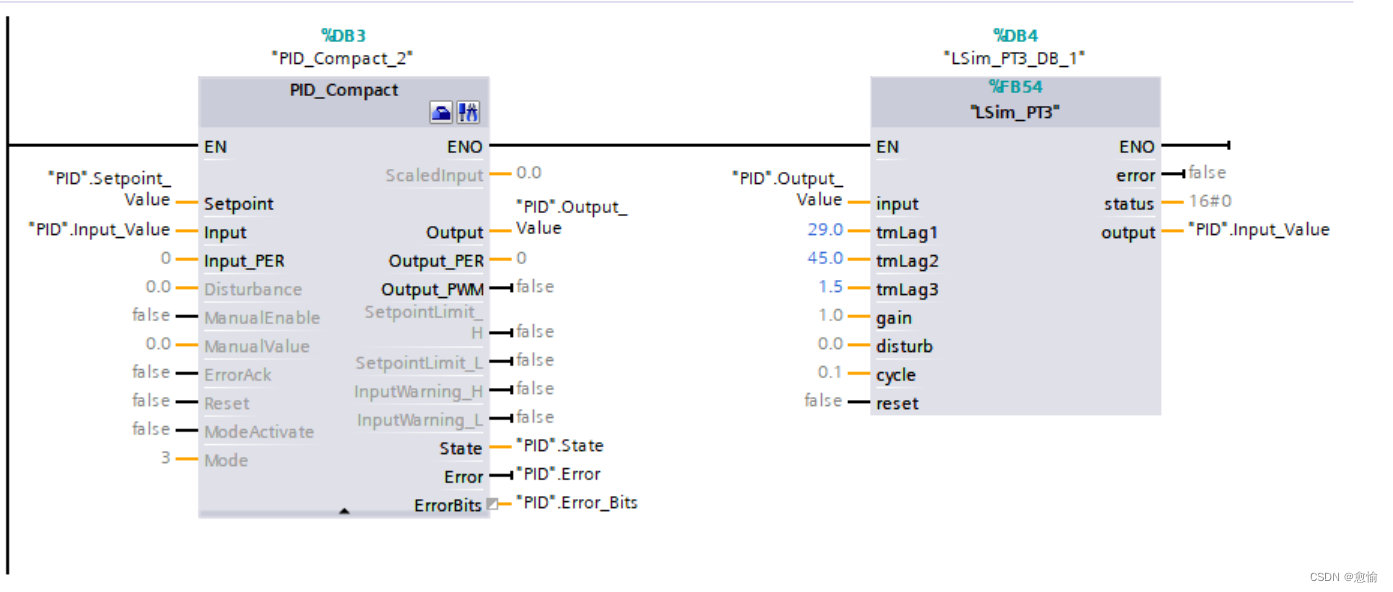
然后就是调试PID_Compact,使其能够正常使用。现象描述:当我们将Setpoint设置为70时,可以通过观看LSim_PT3中的output值是否接近70。然后继续设置为50,观察情况即可。
五、HMI组态
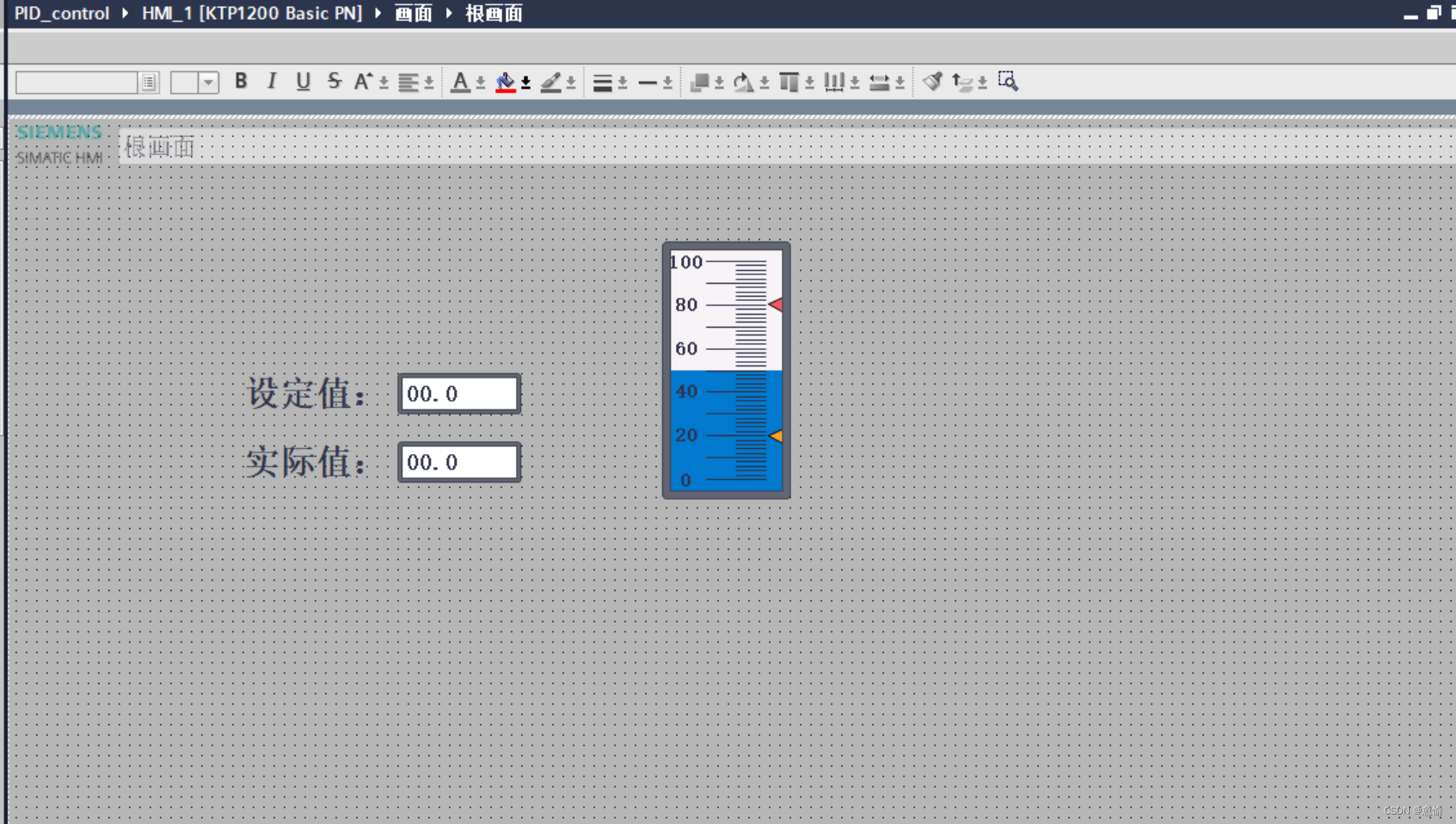
组态HMI通过修改设定值,可以观察 PID调节是否正常。
六、总结
1、该文章主要是对PID功能块的仿真运用,实际有时跟仿真也会有不一样的展示。
2、该功能也是为了解PID指令块的基本应用。