前言:
对于lego-loam中地面点提取部分的源码进行学习。
地面点提取在src/imageProjection.cpp中的函数groundRemoval()。内容比较少,容易理解。
size_t lowerInd, upperInd;
float diffX, diffY, diffZ, angle;lowerInd表示低线数的点云;
upperInd表示相邻的高线数的点云;
diffX,diffY,diffZ分别表示两个点之间x,y,z之间的绝对值差值;
angle表示根据论文推导出来的两点之间的角度。
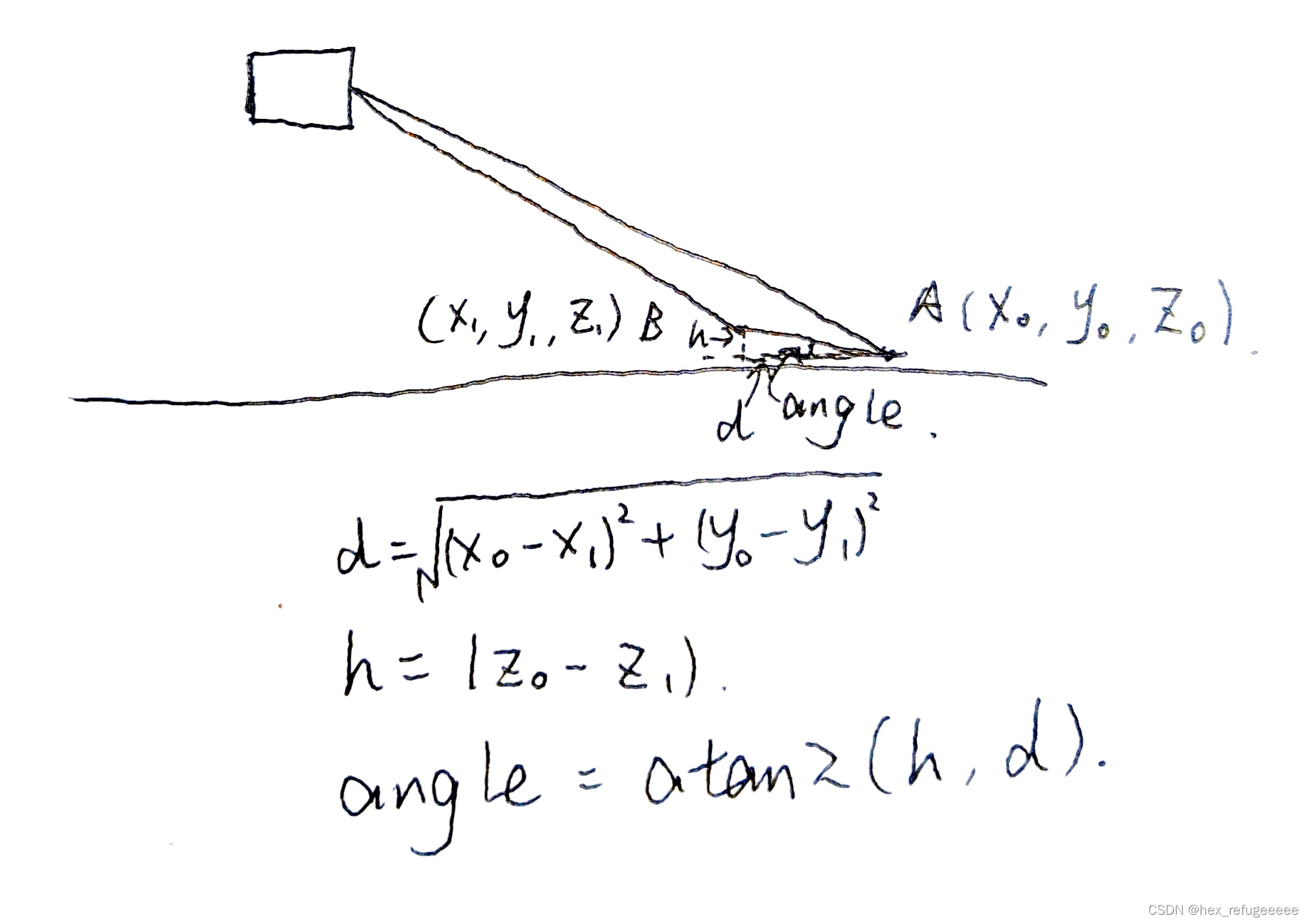
如上图所示。
一、地面点提取部分
// groundMat
// -1, no valid info to check if ground of not
// 0, initial value, after validation, means not ground
// 1, ground源码部分对于属于不同种类的点云进行了分类:
-1是无效点;
0是非地面点;
1表示地面点。
for (size_t j = 0; j < Horizon_SCAN; ++j){
for (size_t i = 0; i < groundScanInd; ++i){
lowerInd = j + ( i )*Horizon_SCAN;
upperInd = j + (i+1)*Horizon_SCAN;
if (fullCloud->points[lowerInd].intensity == -1 ||
fullCloud->points[upperInd].intensity == -1){
// no info to check, invalid points
groundMat.at<int8_t>(i,j) = -1;
continue;
}
diffX = fullCloud->points[upperInd].x - fullCloud->points[lowerInd].x;
diffY = fullCloud->points[upperInd].y - fullCloud->points[lowerInd].y;
diffZ = fullCloud->points[upperInd].z - fullCloud->points[lowerInd].z;
angle = atan2(diffZ, sqrt(diffX*diffX + diffY*diffY) ) * 180 / M_PI;
if (abs(angle - sensorMountAngle) <= 10){
groundMat.at<int8_t>(i,j) = 1;
groundMat.at<int8_t>(i+1,j) = 1;
}
}
}这里的两个for循环是对于地面点的全部遍历,也是论文中提到的将一般图像处理的矩阵应用于点云。
Horizon_SCAN表示1800,因为水平分辨率是0.5,所以是1800个点;
groundScanInd应该是8(如果是16线激光lidar),表示射向地面部分的发射器。
具体表示如下图所示:
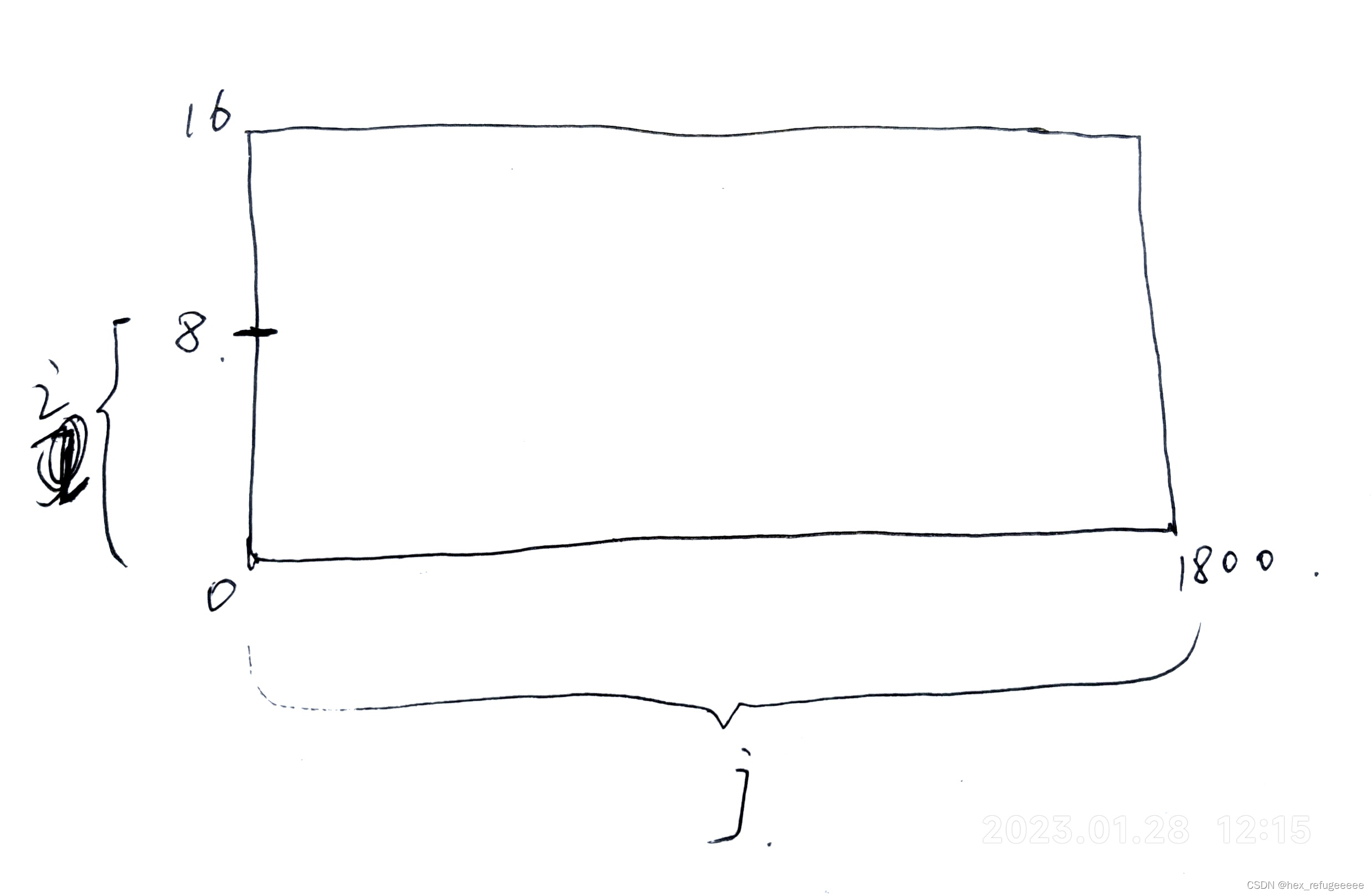
根据上图,对于lowerInd和upperInd的赋值也就一目了然。
if (fullCloud->points[lowerInd].intensity == -1 ||
fullCloud->points[upperInd].intensity == -1){
// no info to check, invalid points
groundMat.at<int8_t>(i,j) = -1;
continue;
}这里如果判断是无效点,就将groundMat矩阵的值赋-1。
diffX = fullCloud->points[upperInd].x - fullCloud->points[lowerInd].x;
diffY = fullCloud->points[upperInd].y - fullCloud->points[lowerInd].y;
diffZ = fullCloud->points[upperInd].z - fullCloud->points[lowerInd].z;
angle = atan2(diffZ, sqrt(diffX*diffX + diffY*diffY) ) * 180 / M_PI;
if (abs(angle - sensorMountAngle) <= 10){
groundMat.at<int8_t>(i,j) = 1;
groundMat.at<int8_t>(i+1,j) = 1;
}这部分就是计算angle,如果小于10度。表明是地面点,将这两个点都赋值为1。
二、移除地面点
for (size_t i = 0; i < N_SCAN; ++i){
for (size_t j = 0; j < Horizon_SCAN; ++j){
if (groundMat.at<int8_t>(i,j) == 1 || rangeMat.at<float>(i,j) == FLT_MAX){
labelMat.at<int>(i,j) = -1;
}
}
}这部分的作用是遍历所有的点,发现是地面点和发射后没有返回的点就将它们标志为-1。
if (pubGroundCloud.getNumSubscribers() != 0){
for (size_t i = 0; i <= groundScanInd; ++i){
for (size_t j = 0; j < Horizon_SCAN; ++j){
if (groundMat.at<int8_t>(i,j) == 1)
groundCloud->push_back(fullCloud->points[j + i*Horizon_SCAN]);
}
}
}这里是通过前面的groundMat矩阵来判断是否为地面点,如果是地面点。即标志位为1,那么就将该点push_back进groundCloud容器中。
三、总结
lego-loam中地面点提取部分比较容易理解,之后使用地面点提取,可以参考这个源码。