系列文章目录
【附带源码】机械臂MoveIt2极简教程(一)、moveit2安装
【附带源码】机械臂MoveIt2极简教程(二)、move_group交互
【附带源码】机械臂MoveIt2极简教程(三)、URDF/SRDF介绍
【附带源码】机械臂MoveIt2极简教程(四)、第一个入门demo
【附带源码】机械臂MoveIt2极简教程(五)、第二个demo - rviz可视化
目录
- 系列文章目录
- 1. 新建C++代码
- 2. 修改launch文件
- 3. 修改CMakeLists.txt
- 4. 运行
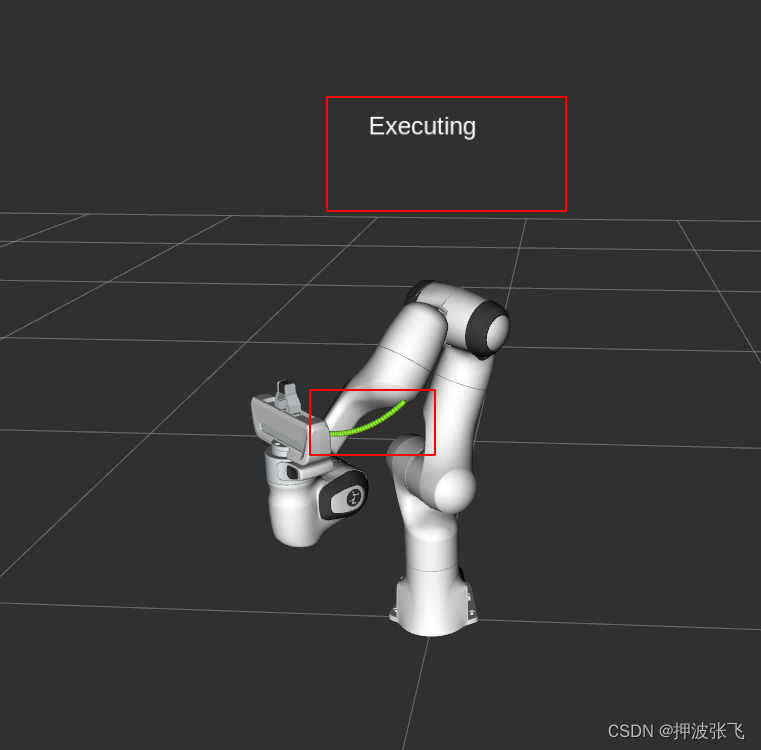
本节实现的效果就是在rviz中添加文字和机械臂运动轨迹画图。
机械臂MoveIt2极简教程(五)、rviz可视化
本节demo不另外创建package包,直接在上一节的demo_moveit包中运行。做的改动包括三个
- 新建C++代码
- 修改launch文件的Node
- 修改CMakeLists.txt
1. 新建C++代码
注意代码中两个地方的修改,一个是MoveGroupInterface传入的机械臂名称叫panda_arm;另一个是MoveItVisualTools中传入的tf link名称叫panda_link0。如果这两个地方没有和机械臂本体对应上,那么rviz中无法显示你需要的文字和路径图标。
#include <rclcpp/rclcpp.hpp>
#include <moveit/move_group_interface/move_group_interface.h>
#include <moveit_visual_tools/moveit_visual_tools.h>
int main(int argc, char **argv)
{
rclcpp::init(argc, argv);
auto node = rclcpp::Node::make_shared("visualize_in_rviz", rclcpp::NodeOptions().automatically_declare_parameters_from_overrides(true));
rclcpp::executors::SingleThreadedExecutor executors;
executors.add_node(node);
std::thread([&executors]()
{
executors.spin(); })
.detach();
auto const logger = rclcpp::get_logger("visualize_in_rviz");
RCLCPP_INFO(logger, "start ");
auto move_group = moveit::planning_interface::MoveGroupInterface(node, "panda_arm");
auto moveit_visual_tools = moveit_visual_tools::MoveItVisualTools(node, "panda_link0", rviz_visual_tools::RVIZ_MARKER_TOPIC, move_group.getRobotModel());
moveit_visual_tools.deleteAllMarkers();
moveit_visual_tools.loadRemoteControl();
auto const draw_title = [&moveit_visual_tools](auto text)
{
auto const text_pose = []
{
auto msg = Eigen::Isometry3d::Identity();
msg