Cesium加载本地影像+地形
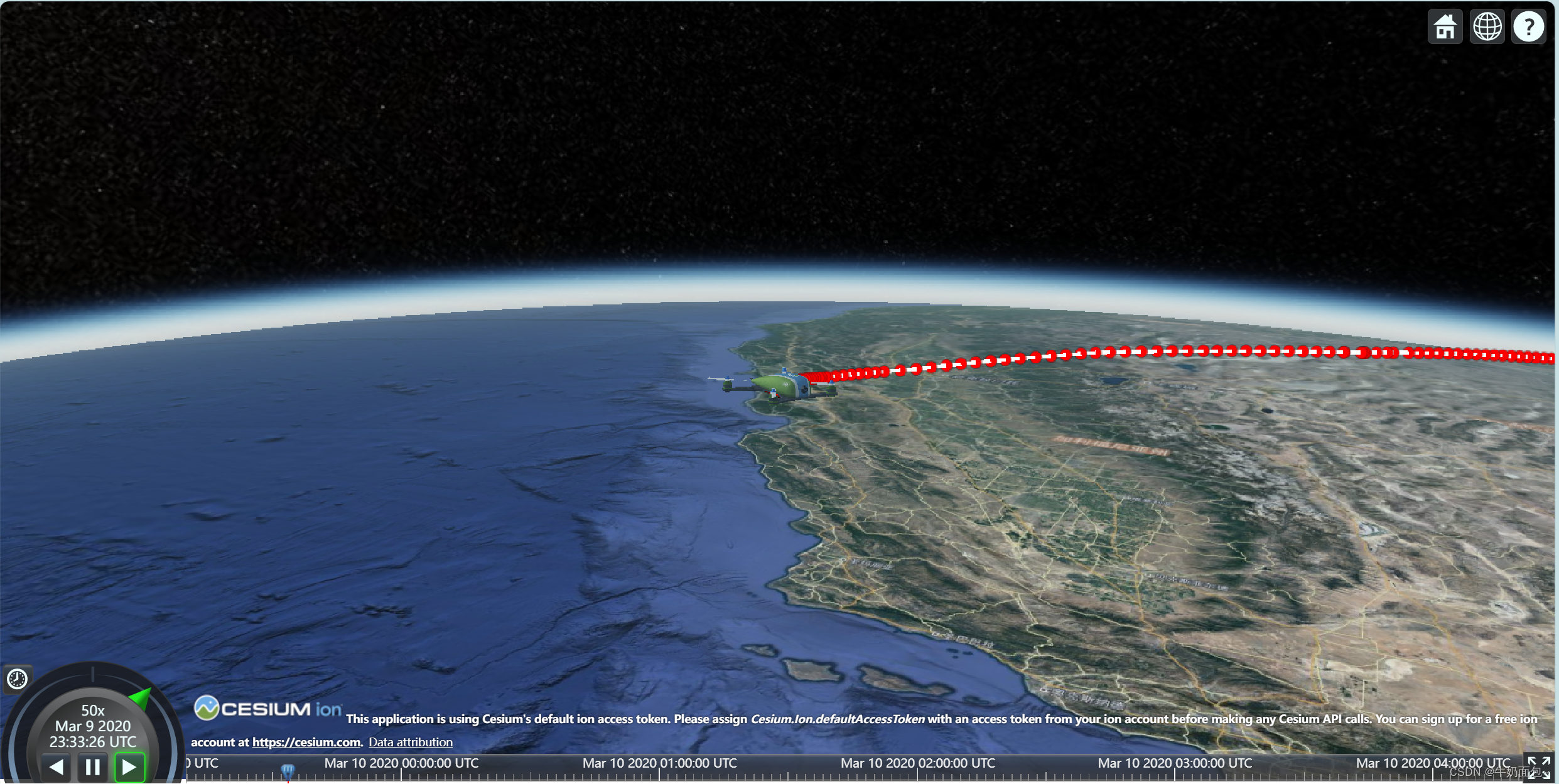
本教程记录的是小白从0-1搭建本地cesium服务的过程,踩的各种坑通过查找资料都一一填补,最终达到的效果是在本地上能够跑官网飞机航线的例子。效果如下:
主要流程如下:
- 1、下载离线地图和地形
- 2、nginx部署静态文件
- 3、cesium调用本地影像和地形
1、下载离线地图和地形
全网各种影像、地形下载器要么是收费,要么不好用,要么下载下来带水印。在github上大海捞针,找到了珍贵的,免费的!!完整的!!全球影像地图!!直接上链接。
感谢这位同性交友网名为sunhongyue4500的博主:影像地形下载链接
2、nginx部署静态文件
官网上下载nginx,然后把下载好的离线影像和地形放在html文件夹里面。
顺着nginx的目录文件,我在html里面新建了一个static文件夹,然后放在里面。
然后配置./nginx/conf/nginx.conf文件
server {
listen 666;
server_name localhost;
#charset koi8-r;
#access_log logs/host.access.log main;
location / {
root html;
index index.html index.htm;
}
location /static/ {
alias E:/Tools/nginx-1.24.0/html/static/;
add_header Access-Control-Allow-Origin *;
#autoindex on;
#autoindex_localtime on;
#index 0.png;
}
实际上这里不需要配置/static/ 也可以,直接按照文件夹的目录来寻址也可。能按照如下地址访问得到,说明已经发布成功^ ~ ^
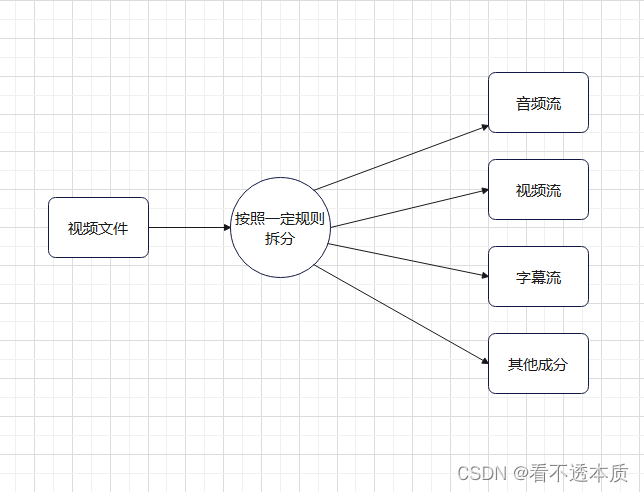
3、cesium调用
- cesium支持的坐标系有两个,分别是WGS64(EPSG:4326)和墨卡托(EPSG:3785),而瓦片服务有TMS和TWMS两种,
- 需要注意的是,cesiums默认TWMS服务,默认的是Mercator坐标系切片,至于这两者的切片区别参考:https://blog.csdn.net/weixin_43336525/article/details/134926608WMS
- 在Cesium中,如果你使用的坐标系为EPSG:4326(即WGS84经纬度坐标系),而瓦片服务遵循TMS(Tile Map Service)规范,确实需要注意瓦片的行列坐标与Cesium默认的Web Mercator投影下的瓦片坐标不一致。TMS规范中,y坐标是从南向北递增的,而Web Mercator下是从北向南递增的,这通常会导致瓦片显示混乱。
- 所以需要reverseY,这样就ok了。所以本质上还是要探索坐标系(EPSG:4326、EPSG:3758)、瓦片服务(TMS、WMTS)这两者,就可以对其进行修改。
总之这里使用reverseY而不是y,原因是我的地图瓦片服务是WMS
其次后台我使用了nginx部署静态资源
参考1
参考2
完整代码:
<!DOCTYPE html>
<html lang="en">
<head>
<meta charset="UTF-8" />
<meta name="viewport" content="width=device-width, initial-scale=1.0" />
<title>cesium第一课</title>
<script src="../lib/Cesium/Cesium.js"></script>
<link href="../lib/Cesium/Widgets/widgets.css" rel="stylesheet" />
<style>
html,
body {
margin: 0px;
padding: 0px;
}
</style>
</head>
<body>
<div id="zk-cesiumContainer"></div>
<script>
// 影像图
const custom = new Cesium.UrlTemplateImageryProvider({
// url: "http://127.0.0.1:666/static/image_data/{z}/{x}/{y}.png",
url: "http://127.0.0.1:666/static/map/{z}/{x}/{reverseY}.jpg",
tilingScheme: new Cesium.GeographicTilingScheme(),
});
// 地形
const terrainLayer = new Cesium.CesiumTerrainProvider({
url: "http://127.0.0.1:666/static/terrain/",
requestVertexNormals: true, // 请求照明
requestWaterMask: true, // 请求水波纹效果
});
// 下一步:部署离线地形!!
var viewer = new Cesium.Viewer("zk-cesiumContainer", {
// imageryProvider: custom,
// terrainProvider: terrainLayer,
baseLayerPicker: false,
geocoder: false,
});
// 整合资源
viewer.imageryLayers.addImageryProvider(custom);
// viewer.terrainProvider = terrainLayer
// viewer.terrainExaggeration = 1
fetch("../resources/radar_airline.json")
.then((response) => {
// 首先检查响应是否成功
if (!response.ok) {
throw new Error("Network response was not ok");
}
return response.json(); // 解析 JSON 数据
})
.then((data) => {
// 此时 data 就是解析后的 JSON 数据
const flightData = data;
console.log(flightData);
const timeStepInSeconds = 30; // 每隔30s取一个radar点
const totalSeconds = timeStepInSeconds * (flightData.length - 1);
const start = Cesium.JulianDate.fromIso8601("2020-03-09T23:10:00Z");
const stop = Cesium.JulianDate.addSeconds(
start,
totalSeconds,
new Cesium.JulianDate()
);
viewer.clock.startTime = start.clone();
viewer.clock.stopTime = stop.clone();
viewer.clock.currentTime = start.clone();
viewer.timeline.zoomTo(start, stop);
// Speed up the playback speed 50x.
viewer.clock.multiplier = 50;
// Start playing the scene.
viewer.clock.shouldAnimate = true;
// The SampledPositionedProperty stores the position and timestamp for each sample along the radar sample series.
const positionProperty = new Cesium.SampledPositionProperty();
for (let i = 0; i < flightData.length; i++) {
const dataPoint = flightData[i];
// Declare the time for this individual sample and store it in a new JulianDate instance.
const time = Cesium.JulianDate.addSeconds(
start,
i * timeStepInSeconds,
new Cesium.JulianDate()
);
const position = Cesium.Cartesian3.fromDegrees(
dataPoint.longitude,
dataPoint.latitude,
dataPoint.height
);
// Store the position along with its timestamp.
// Here we add the positions all upfront, but these can be added at run-time as samples are received from a server.
positionProperty.addSample(time, position);
viewer.entities.add({
description: `Location: (${dataPoint.longitude}, ${dataPoint.latitude}, ${dataPoint.height})`,
position: position,
point: { pixelSize: 10, color: Cesium.Color.RED },
});
}
// STEP 4 CODE (green circle entity)
// Create an entity to both visualize the entire radar sample series with a line and add a point that moves along the samples.
async function loadModel() {
// Load the glTF model from Cesium ion.
const airplaneEntity = viewer.entities.add({
availability: new Cesium.TimeIntervalCollection([
new Cesium.TimeInterval({ start: start, stop: stop }),
]),
position: positionProperty,
// Attach the 3D model instead of the green point.
model: {
uri: "../resources/CesiumDrone.glb",
minimumPixelSize: 128,
maximumScale: 20000,
},
// Automatically compute the orientation from the position.
orientation: new Cesium.VelocityOrientationProperty(
positionProperty
),
path: new Cesium.PathGraphics({ width: 3 }),
});
viewer.trackedEntity = airplaneEntity;
}
loadModel();
})
.catch((error) => {
// 处理任何在请求或解析过程中发生的错误
console.error(
"There has been a problem with your fetch operation:",
error
);
});
</script>
</body>
</html>






![[office] excel表格中双击鼠标左键有什么快捷作用- #经验分享#媒体](https://img-blog.csdnimg.cn/img_convert/7a4a60abf7bd144b6b85b8a69cba98ab.jpeg)