第1讲 GNSS系统组成以及应用
北斗导航科普动画_哔哩哔哩_bilibili
1.1 GNSS系统
1.1.1 基本概念
全球卫星导航系统(Global Navigation Satellite System, GNSS),是能在地球表面或近地空间的任何地点为用户提供全天候的三维坐标、速度以及时间信息的卫星无线电导航定位系统。
GNSS是所有卫星导航定位系统的总称,凡是可以通过捕获跟踪其卫星信号实现定位的系统,均可纳入GNSS系统的范围。GNSS信号是广播式,即只要能收到信号,就可以实现定位,不需要用户和卫星进行交互,即理论上来说,GNSS系统的用户容量是无限的。
1.1.2 GNSS系统组成
卫星导航系统包括:空间星座部分、地面监控部分、用户设备部分。
1.1.2.1 空间星座部分
即在轨运行的GNSS卫星,主要设备包含:
- 太阳能电池板
- 原子钟
- 信号生成装置
- 发射装置
主要作用:
- 接收、存储导航电文;
- 生成和发送用于导航定位信号(测距码、载波);
- 接受地面指令,进行相应操作。
1.1.2.2 地面监控部分
监测站:
- 接收卫星数据,采集气象信息,并将所收集到的数据传送给主控站。
主控站:
- 管理、协调地面监控系统各部分工作;
- 收集各监测站的数据,编制导航电文,发送注入站将卫星星历注入卫星;
- 监控卫星状态,向卫星发送控制指令;
- 卫星维护与异常情况的处理。
注入站:
- 将导航电文注入GNSS卫星。
1.1.2.3 用户部分
用户部分包括各种GNSS接收设备,主要包含以下部分:
-
天线:
- 防流圈天线
- 螺旋天线
- 贴片天线
- 碟形天线
-
接收机:
- 测地型接收机
- 测量型接收机
- 模块
1.1.3 GNSS应用
GNSS在多种领域有广泛的应用,包括:
- 导航定位功能
- 授时功能
- 测量测绘
- 灾情预警
- 大气监测
- 坐标框架
1.2 GPS/BDS/GAL/GLO等
GNSS系统的主要构成部分包括GPS、BDS、GAL、GLO等。各系统的特点如下:
-
GPS
- 时间尺度
- 用户最广泛
- MEO
-
BDS
- 三步走
- GEO+IGSO+MEO
- 北斗短报文
-
GAL
- 钟精度高
- 多次出现星历改换情况
- MEO
-
GLO
- 频分多址,较复杂
- 精度低
- MEO
1.3 卫星高度
卫星根据轨道高度可分为:
- LEO 低轨卫星:轨道高度 400-2000km,速度快
- MEO 中轨卫星:轨道高度 2000-36000km,速度中等
- IGSO 倾斜地球同步轨道:轨道高度 36000km,速度慢
- GEO 地球静止轨道:轨道高度 36000km,静止
通过这些不同高度的卫星,GNSS系统能够实现全球范围内的高精度导航和定位。
第2讲 GNSS相关的坐标框架和转换
2.1 坐标系统概述
GNSS系统依赖于精确的坐标系统,以提供精确的定位、导航和时间服务。主要坐标系统包括:
- 地球坐标系统:也称地理坐标系统,是根据地球的自然特性定义的,用于描述位置的地球模型;
- 天球坐标系统:基于天体的位置来定义,用于天文导航和深空探索;
- 投影坐标系统:将地球表面的三维特征转换为二维平面,广泛用于地图绘制;
- 本地坐标系统:用于特定地区或场所的详细地理信息系统。
2.2 天球坐标系(惯性坐标系)
天球坐标系是一种以地球为基准的惯性坐标系,它不随地球自转或公转而变化,提供一个静态的背景,以便更好地追踪天体运动和卫星轨道。
- 基本要素:地心坐标(地心惯性坐标系ECI),主要包括不同元素如X, Y, Z轴,通常用于描述天体的位置和运动。
- 应用:广泛应用于航天导航和天文观测,由于其固定不变的特性,使其成为描述卫星轨道和进行空间任务规划的理想选择。
2.3 地球坐标系
地球坐标系与天球坐标系的主要区别在于地球坐标系是以地球的运动为参考基准的。地球坐标系可以细分为以下几类:
2.3.1 地心地固坐标系 (ECEF)
地心地固坐标系固定于地球,其坐标轴与地球的自转轴和赤道平面相一致。这种坐标系通常用于GPS定位、地理信息系统、以及大范围的地球科学应用。
- 坐标定义:原点位于地球的质心,Z轴与地球自转轴重合,指向北极;X轴指向通过格林尼治天文台的本初子午线与赤道的交点;Y轴与X轴、Z轴正交。
2.3.2 地球站坐标系
地球站坐标系通常用于描述卫星与地面站的相对位置。此坐标系与地球自转同步,因此可以描述卫星与地面站的相对动态位置。
- 主要元素:包括与地面站有关的东向、北向和天顶方向的单位矢量。
2.4 地心惯性坐标系/地球站坐标系
这两种坐标系的应用使得GNSS能够精确地进行地球范围内的导航和定位任务。地心惯性坐标系为全球提供了一个统一的参考框架,而地球站坐标系则更适合于描述地面用户与空中卫星之间的动态关系。
- 地心惯性坐标系 (ECI):适用于描述在高轨道上的卫星,例如地球同步或地球静止轨道的卫星。
- 地球站坐标系:用于描述低轨道卫星如GPS和地面接收站之间的实时动态。
岁差和章动(天文)-CSDN博客
第3讲 GNSS相关时间系统和转换
GPS卫星的定位中时间起着至关重要的作用,因此在给定GPS卫星的位置信标时,必须给出相应的瞬时刻。GPS定位是通过GPS接收机测量并处理GPS卫星发射的信号,来确定观测站到卫星的距离,并计算观测站的位置。而由观测站到卫星的距离的测定,是通过卫星到测站时间的信号传播时间测定的,若要求误差不超过1cm,则信号传播时间的测定误差,约应达到30-110ns。
关于时间的描述,必须建立一个时间的参考基准,它包括时间原点(起始历元)和时间单位(尺度)。其中时间的尺度是固定的,而原点可以根据实际应用来选定。
3.1 时间单位-原子秒
现代物理学认为,物质内部的原子跃迁,所辐射或吸收的电磁波频率,具有极高的稳定性和重复性。所以根据这一物理规律便建立了原子钟。1967年定义了原子时的度量标准:国际单位制(SI)原子秒的定义为:位于海平面和地球椭球形表面上方的铯133原子基态超精细跃迁辐射周期的9192631770个周期的持续时间,为一原子时秒。
3.2 时间框架和其时间起点
3.2.1 原子时(AT)
原子时起始定义在1958年1月1日0时0分0秒(UT),即现在这一瞬间原子时的时刻与世界时相差0。但后来发现,在该瞬间原子时与世界时的时刻之差为0.0039s。于是定义为世界标准时间:国际原子时(International Atomic Time, IAT)。
3.2.2 世界时(UT)
世界时是根据地球自转确定的时间系统,是地球上某点相对于平太阳时的时间。为了解决地球自转速率不均的问题,引入了世界时UT1和世界时UT2。
3.2.3 协调世界时(UTC)
协调世界时(Coordinated Universal Time, UTC)是国际上通用的时间标准,是在国际原子时(IAT)的基础上,通过加入闰秒调整而来。UTC与IAT的关系为:
I A T = U T C + 1 × n IAT = UTC + 1 \times n IAT=UTC+1×n
其中,n为调整参数,由国际地球自转服务组织(IERS)发布。
3.2.4 GPST
GPST是GPS系统采用的时间标准,以美国海军天文台(USNO)维护的协调世界时(UTC)作为基准。GPS时间与原子时TAI公认相差一个常数:
T A I − G P S T = 19.0 s TAI - GPST = 19.0s TAI−GPST=19.0s
在GPS系统开始时,GPST与UTC一致。2014年7月起,GPST比UTC快16秒。
3.2.5 BDT
北斗系统的时间基准为北斗时(BDT)。BDT采用国际单位制(SI)秒为基本单位连续累计,不跳秒,起始历元为2006年1月1日0时0分0秒。BDT与UTC通过BDT系统内的服务链接,BDT与UTC时间差值保持在100纳秒以内(极值)。
3.2.6 GLOT和GAL
GLOT是GLONASS系统的时间基准,GAL是GALILEO系统的时间基准。
3.3 时间表示方法
时间的表示方法有多种,常见的有:
- 周-秒体制:用周和秒表示时间,如GPS周内秒数;
- 格里高利历:如公历;
- 年积日:年内的某一天;
- 儒略日:从某时刻开始的天数;
- 约化儒略日:儒略日减去起点后的天数。
总结
GNSS时间系统在导航和定位中起着关键作用,正确理解和应用这些时间基准和坐标系统,是实现高精度定位和导航的基础。
第4讲 观测值的产⽣以及分类
4.1 电磁波测距原理
主要解释了如何利用电磁波进行距离测量。下面是对这个原理的详细讲解及举例:
电磁波测距原理
电磁波测距的基本原理是通过测量电磁波从发射点到达接收点所需的时间,来计算两点之间的距离。其基本公式是:
S = c ⋅ Δ t 2 S = \frac{c \cdot \Delta t}{2} S=2c⋅Δt
其中:
- S S S 是发射点和接收点之间的距离。
- c c c 是光速,约为 299 , 792 , 458 299,792,458 299,792,458 米/秒。
- Δ t \Delta t Δt 是电磁波从发射到接收所经过的时间。
举例说明
假设我们有一个电磁波测距系统,系统中包含一个发射器和一个接收器。发射器发出一个电磁脉冲信号,这个信号被接收器接收到。测距系统测量出从信号发出到接收到的时间差为 20 20 20 纳秒(纳秒是十亿分之一秒)。
我们可以使用上述公式计算两者之间的距离:
-
计算光速的行程时间:
c ⋅ Δ t = 299 , 792 , 458 m/s × 20 × 1 0 − 9 s = 5.99584916 m c \cdot \Delta t = 299,792,458 \, \text{m/s} \times 20 \times 10^{-9} \, \text{s} = 5.99584916 \, \text{m} c⋅Δt=299,792,458m/s×20×10−9s=5.99584916m -
由于信号是从发射器发出并返回到接收器的,总行程是距离的两倍,因此实际距离是总行程的一半:
S = 5.99584916 m 2 = 2.99792458 m S = \frac{5.99584916 \, \text{m}}{2} = 2.99792458 \, \text{m} S=25.99584916m=2.99792458m
因此,在这个例子中,发射器和接收器之间的距离为约 2.998 2.998 2.998 米。
周期信号的测量
如果已知电磁波的波长为 λ \lambda λ,从A点发射到B点并反射回A点的信号经历了 N N N 个完整周期和一个部分周期(相位差为 Δ ϕ \Delta \phi Δϕ),那么距离S可以表示为:
S = ( N + Δ ϕ 2 π ) ⋅ λ S = \left( N + \frac{\Delta \phi}{2\pi} \right) \cdot \lambda S=(N+2πΔϕ)⋅λ
举例说明
假设电磁波的波长为 0.19 0.19 0.19 米(L1载波),发射器和接收器之间的信号经过了 10 10 10 个完整周期,且测得相位差为 π \pi π(即半个周期)。则:
- 计算信号的总行程:
S = ( 10 + π 2 π ) ⋅ 0.19 m = ( 10 + 0.5 ) ⋅ 0.19 m = 10.5 ⋅ 0.19 m = 1.995 m S = \left( 10 + \frac{\pi}{2\pi} \right) \cdot 0.19 \, \text{m} = \left( 10 + 0.5 \right) \cdot 0.19 \, \text{m} = 10.5 \cdot 0.19 \, \text{m} = 1.995 \, \text{m} S=(10+2ππ)⋅0.19m=(10+0.5)⋅0.19m=10.5⋅0.19m=1.995m
因此,在这个例子中,发射器和接收器之间的距离为 1.995 1.995 1.995 米。
这些例子展示了如何利用电磁波测距原理计算两个点之间的距离,不论是通过测量时间差还是利用波长和相位差的方法,都可以有效地实现精确的距离测量。
4.2 卫星信号
卫星信号主要包括载波、测距码(如C/A码)和导航电文/数据码。它们之间相互关联,协同工作,以实现高精度定位。下面将举例解释它们之间的关系。
载波
载波是高频振荡波,用于承载调制信号。在GPS系统中,常用的载波有L1和L2频段。例如,L1载波频率为 1575.42 1575.42 1575.42 MHz,对应的波长约为 0.19 0.19 0.19 米。
举例说明:
假设GPS卫星发射的L1载波频率为
1575.42
1575.42
1575.42 MHz。当接收机接收到这个载波信号后,可以对其进行解调,提取出调制在其上的测距码和导航数据。
测距码(C/A码)
C/A码是GPS系统中的伪随机码,用于测量从卫星到接收机的距离。C/A码的码元宽度为 293 293 293 米,信号调制在L1载波上。
举例说明:
假设卫星发射的C/A码信号与接收机复制的C/A码信号的时间延迟为
1
0
−
7
10^{-7}
10−7 秒。则伪距观测量为:
P
=
c
⋅
Δ
t
=
299
,
792
,
458
m/s
×
1
0
−
7
s
=
29.9792458
m
P = c \cdot \Delta t = 299,792,458 \, \text{m/s} \times 10^{-7} \, \text{s} = 29.9792458 \, \text{m}
P=c⋅Δt=299,792,458m/s×10−7s=29.9792458m
因此,接收机与卫星之间的伪距为约
29.98
29.98
29.98 米。
导航电文/数据码
导航电文包含卫星的位置、工作状态、时钟校正参数、电离层校正参数等重要数据。这些数据被调制在测距码上,并通过载波发送。
举例说明:
假设导航电文中包含卫星的星历信息、时钟校正参数、电离层校正参数等。这些信息对接收机进行定位和误差校正至关重要。例如,星历信息帮助接收机计算卫星在某一时刻的位置,而时钟校正参数用于修正接收机的时间误差。
载波、C/A码、数据码之间的关系
载波、C/A码和数据码之间的关系可以通过以下步骤来理解:
-
载波传输:
卫星首先产生高频载波(如L1载波),为 1575.42 1575.42 1575.42 MHz。载波本身是一个纯正弦波,不携带任何信息。 -
测距码调制:
卫星将C/A码调制到载波上。C/A码是一种伪随机码,用于测量卫星与接收机之间的伪距。 -
导航电文调制:
导航电文(数据码)也被调制到同一载波上。导航电文包含有用的卫星信息,如星历和校正参数。这些数据被调制到测距码上,随同C/A码一起传输。
举例说明:
- 假设卫星发射的L1载波上调制了C/A码和导航电文。
- 接收机接收到载波信号后,首先进行解调,提取出C/A码和导航电文。
- 使用C/A码,接收机计算出与卫星的伪距。例如,时间延迟为 1 0 − 7 10^{-7} 10−7 秒,伪距为 29.98 29.98 29.98 米。
- 导航电文提供的星历信息,帮助接收机确定卫星在该时刻的准确位置。
- 导航电文中的时钟校正参数,用于修正接收机的时间误差,提高定位精度。
通过这种方式,载波、C/A码和导航电文协同工作,使得GPS接收机能够准确计算其在地球表面的三维位置及时间信息。
4.3 伪距观测量
伪距观测量是指通过测量从卫星发射到接收机接收的时间延迟,来计算卫星到接收机的距离。这种观测方法也称为时间延迟测量。伪距观测量受到卫星钟差、接收机钟差、电离层延迟、对流层延迟等多种误差的影响。
伪距观测量的计算
伪距观测量的基本公式为:
P i j = ρ i j + c ⋅ ( d T j − d T i ) + I i j + T i j + ϵ P P_i^j = \rho_i^j + c \cdot (dT_j - dT_i) + I_i^j + T_i^j + \epsilon_P Pij=ρij+c⋅(dTj−dTi)+Iij+Tij+ϵP
其中:
- P i j P_i^j Pij 是卫星 i i i 到接收机 j j j 的伪距观测量。
- ρ i j \rho_i^j ρij 是卫星 i i i 到接收机 j j j 的真实几何距离。
- c c c 是光速。
- d T j dT_j dTj 是接收机钟差。
- d T i dT_i dTi 是卫星钟差。
- I i j I_i^j Iij 是电离层延迟。
- T i j T_i^j Tij 是对流层延迟。
- ϵ P \epsilon_P ϵP 是观测噪声。
举例说明
假设在某一时刻,接收机从GPS卫星接收到C/A码信号,测得的时间延迟为 0.07 0.07 0.07 毫秒( 70 70 70 微秒)。利用伪距观测量的公式,我们可以计算出伪距观测量:
-
计算光速传播的距离:
P = c ⋅ Δ t = 299 , 792 , 458 m/s × 70 × 1 0 − 6 s = 20 , 985.47206 m P = c \cdot \Delta t = 299,792,458 \, \text{m/s} \times 70 \times 10^{-6} \, \text{s} = 20,985.47206 \, \text{m} P=c⋅Δt=299,792,458m/s×70×10−6s=20,985.47206m因此,伪距观测量 P P P 为约 20 , 985.47206 20,985.47206 20,985.47206 米。
-
考虑误差修正:
- 卫星钟差:假设卫星钟差 d T i dT_i dTi 为 10 10 10 纳秒。
- 接收机钟差:假设接收机钟差 d T j dT_j dTj 为 15 15 15 纳秒。
- 电离层延迟:假设电离层延迟 I i j I_i^j Iij 为 3 3 3 米。
- 对流层延迟:假设对流层延迟 T i j T_i^j Tij 为 2 2 2 米。
- 观测噪声:假设观测噪声 ϵ P \epsilon_P ϵP 为 0.5 0.5 0.5 米。
将这些误差代入公式进行修正:
P i j = 20 , 985.47206 + 299 , 792 , 458 × ( 15 × 1 0 − 9 − 10 × 1 0 − 9 ) + 3 + 2 + 0.5 P_i^j = 20,985.47206 + 299,792,458 \times (15 \times 10^{-9} - 10 \times 10^{-9}) + 3 + 2 + 0.5 Pij=20,985.47206+299,792,458×(15×10−9−10×10−9)+3+2+0.5P i j = 20 , 985.47206 + 299 , 792 , 458 × 5 × 1 0 − 9 + 5.5 P_i^j = 20,985.47206 + 299,792,458 \times 5 \times 10^{-9} + 5.5 Pij=20,985.47206+299,792,458×5×10−9+5.5
P i j = 20 , 985.47206 + 1.49896229 + 5.5 P_i^j = 20,985.47206 + 1.49896229 + 5.5 Pij=20,985.47206+1.49896229+5.5
P i j = 20 , 992.47102 m P_i^j = 20,992.47102 \, \text{m} Pij=20,992.47102m
因此,修正后的伪距观测量 P i j P_i^j Pij 为约 20 , 992.47102 20,992.47102 20,992.47102 米。
伪距观测量的重要性
伪距观测量是GNSS定位的基本数据,利用多个卫星的伪距观测量,可以通过三角测量法确定接收机的三维坐标和精确时间。通过修正误差,可以显著提高定位精度。
伪距观测量在实际应用中广泛使用,包括车辆导航、测绘、精密农业、自动驾驶等领域。通过不断改进误差模型和算法,可以进一步提升GNSS定位的准确性和可靠性。
4.4 载波观测量
载波观测量是通过测量载波信号的相位变化来确定接收机与卫星之间的距离。这种方法由于载波频率高、波长短,因此测量精度比伪距观测量高得多。载波观测量主要用于高精度定位,例如RTK和PPP。
载波观测量的基本公式
载波观测量的基本公式为:
Φ i j = ρ i j + c ⋅ ( d T j − d T i ) − I i j + T i j + λ N + ϵ Φ \Phi_i^j = \rho_i^j + c \cdot (dT_j - dT_i) - I_i^j + T_i^j + \lambda N + \epsilon_\Phi Φij=ρij+c⋅(dTj−dTi)−Iij+Tij+λN+ϵΦ
其中:
- Φ i j \Phi_i^j Φij 是卫星 i i i 到接收机 j j j 的载波相位观测量(以周为单位)。
- ρ i j \rho_i^j ρij 是卫星 i i i 到接收机 j j j 的真实几何距离。
- c c c 是光速。
- d T j dT_j dTj 是接收机钟差。
- d T i dT_i dTi 是卫星钟差。
- I i j I_i^j Iij 是电离层延迟(与伪距观测量不同,载波观测量中的电离层延迟是负值)。
- T i j T_i^j Tij 是对流层延迟。
- λ \lambda λ 是载波的波长。
- N N N 是整周模糊度(整数)。
- ϵ Φ \epsilon_\Phi ϵΦ 是观测噪声。
举例说明
假设接收机测得某一时刻的载波相位为 10.5 10.5 10.5 周,L1载波频率为 1575.42 1575.42 1575.42 MHz,对应波长 λ \lambda λ 约为 0.19 0.19 0.19 米。利用载波观测量的公式,我们可以计算出载波观测量:
-
计算真实几何距离:
假设卫星 i i i 到接收机 j j j 的真实几何距离 ρ i j \rho_i^j ρij 为 20 , 000 20,000 20,000 米。 -
考虑误差修正:
- 卫星钟差:假设卫星钟差 d T i dT_i dTi 为 10 10 10 纳秒。
- 接收机钟差:假设接收机钟差 d T j dT_j dTj 为 15 15 15 纳秒。
- 电离层延迟:假设电离层延迟 I i j I_i^j Iij 为 3 3 3 米(负值)。
- 对流层延迟:假设对流层延迟 T i j T_i^j Tij 为 2 2 2 米。
- 整周模糊度:假设整周模糊度 N N N 为 100 100 100 周。
- 观测噪声:假设观测噪声 ϵ Φ \epsilon_\Phi ϵΦ 为 0.01 0.01 0.01 周。
将这些误差代入公式进行修正:
Φ i j = 20 , 000 + 299 , 792 , 458 × ( 15 × 1 0 − 9 − 10 × 1 0 − 9 ) − 3 + 2 + 0.19 × 100 + 0.01 \Phi_i^j = 20,000 + 299,792,458 \times (15 \times 10^{-9} - 10 \times 10^{-9}) - 3 + 2 + 0.19 \times 100 + 0.01 Φij=20,000+299,792,458×(15×10−9−10×10−9)−3+2+0.19×100+0.01Φ i j = 20 , 000 + 299 , 792 , 458 × 5 × 1 0 − 9 − 1 + 19 + 0.01 \Phi_i^j = 20,000 + 299,792,458 \times 5 \times 10^{-9} - 1 + 19 + 0.01 Φij=20,000+299,792,458×5×10−9−1+19+0.01
Φ i j = 20 , 000 + 1.49896229 − 1 + 19 + 0.01 \Phi_i^j = 20,000 + 1.49896229 - 1 + 19 + 0.01 Φij=20,000+1.49896229−1+19+0.01
Φ i j = 20 , 019.50896229 m \Phi_i^j = 20,019.50896229 \, \text{m} Φij=20,019.50896229m
因此,修正后的载波观测量 Φ i j \Phi_i^j Φij 为约 20 , 019.50896229 20,019.50896229 20,019.50896229 米。
载波观测量的重要性
载波观测量因其高精度,广泛用于高精度的GNSS定位技术,如实时动态定位(RTK)和精密单点定位(PPP)。通过解决整周模糊度问题,可以实现厘米级甚至毫米级的定位精度。
载波观测量与伪距观测量的关系
载波观测量和伪距观测量相辅相成,在GNSS定位中各有其应用场景:
- 伪距观测量用于初始定位,具有较快的收敛速度,但精度较低。
- 载波观测量用于精密定位,具有较高的精度,但需要解决整周模糊度问题。
通过结合两种观测量,可以在较短时间内实现高精度的定位结果。
4.5 多普勒观测量
多普勒观测量是通过测量接收机接收到的载波频率相对于发射频率的变化来估计接收机的相对速度。多普勒效应在GNSS中用于速度估计和动态定位。
多普勒观测量的基本公式
当接收机相对于卫星移动时,接收到的载波频率会发生变化。这个频率变化称为多普勒频移,其计算公式为:
f d = v λ cos θ f_d = \frac{v}{\lambda} \cos \theta fd=λvcosθ
其中:
- f d f_d fd 是多普勒频移。
- v v v 是接收机相对于卫星的相对速度。
- λ \lambda λ 是载波的波长。
- θ \theta θ 是接收机运动方向与卫星信号入射方向之间的夹角。
实际应用中,多普勒频移还可以表示为:
f d = f r − f t f_d = f_r - f_t fd=fr−ft
其中:
- f r f_r fr 是接收机接收到的载波频率。
- f t f_t ft 是卫星发射的载波频率。
举例说明
假设某时刻,GPS卫星发射的L1载波频率为 1575.42 1575.42 1575.42 MHz,对应波长 λ \lambda λ 为 0.19 0.19 0.19 米。接收机接收到的载波频率为 1575.4215 1575.4215 1575.4215 MHz,因此多普勒频移为:
f d = 1575.4215 MHz − 1575.42 MHz = 0.0015 MHz = 1.5 kHz f_d = 1575.4215 \, \text{MHz} - 1575.42 \, \text{MHz} = 0.0015 \, \text{MHz} = 1.5 \, \text{kHz} fd=1575.4215MHz−1575.42MHz=0.0015MHz=1.5kHz
-
计算接收机的相对速度:
v = f d ⋅ λ = 1.5 kHz ⋅ 0.19 m = 285 m/s v = f_d \cdot \lambda = 1.5 \, \text{kHz} \cdot 0.19 \, \text{m} = 285 \, \text{m/s} v=fd⋅λ=1.5kHz⋅0.19m=285m/s因此,接收机相对于卫星的相对速度为 285 285 285 米/秒。
-
考虑入射角:
如果接收机运动方向与卫星信号入射方向之间的夹角 θ \theta θ 为 6 0 ∘ 60^\circ 60∘,则相对速度的分量为:
v relative = v cos θ = 285 m/s ⋅ cos 6 0 ∘ = 285 m/s ⋅ 0.5 = 142.5 m/s v_{\text{relative}} = v \cos \theta = 285 \, \text{m/s} \cdot \cos 60^\circ = 285 \, \text{m/s} \cdot 0.5 = 142.5 \, \text{m/s} vrelative=vcosθ=285m/s⋅cos60∘=285m/s⋅0.5=142.5m/s因此,沿卫星信号入射方向的相对速度为 142.5 142.5 142.5 米/秒。
多普勒观测量的重要性
多普勒观测量在GNSS中的主要用途包括:
- 速度估计:通过测量多普勒频移,接收机可以估计自身的相对速度。这对于动态定位和导航非常重要,特别是在高速运动的情况下,例如在车辆导航和航空应用中。
- 轨道确定:多普勒观测量也可用于卫星的轨道确定,通过测量地面接收站接收到的多普勒频移,可以反推出卫星的轨道参数。
- 定位精度提高:结合多普勒观测量与伪距、载波相位观测量,可以提高定位精度,特别是在高动态环境下。
多普勒观测量与其他观测量的关系
多普勒观测量与伪距观测量和载波观测量相辅相成:
- 伪距观测量:提供初始位置估计。
- 载波观测量:提供高精度位置估计。
- 多普勒观测量:提供速度信息和动态定位支持。
通过综合利用这三种观测量,可以实现高精度、高动态的GNSS定位和导航。
附加A:
多普勒观测量用于测量接收机与卫星之间的相对速度。该公式描述了多普勒频移与接收机和卫星速度之间的关系。
公式解析
f d s = ( v − v s ) ⋅ I s λ = − ( v s − v ) ⋅ I s λ = − r ˙ λ f_d^s = \frac{(v - v^s) \cdot I^s}{\lambda} = -\frac{(v^s - v) \cdot I^s}{\lambda} = -\frac{\dot{r}}{\lambda} fds=λ(v−vs)⋅Is=−λ(vs−v)⋅Is=−λr˙
其中:
- f d s f_d^s fds 是多普勒频移。
- v v v 是接收机的速度向量。
- v s v^s vs 是卫星的速度向量。
- I s I^s Is 是卫星到接收机的单位观测向量。
- λ \lambda λ 是载波的波长。
- r ˙ \dot{r} r˙ 是接收机与卫星之间的相对径向速度。
公式分为三个部分:
-
第一部分:
f d s = ( v − v s ) ⋅ I s λ f_d^s = \frac{(v - v^s) \cdot I^s}{\lambda} fds=λ(v−vs)⋅Is这表示多普勒频移是接收机速度与卫星速度之差的投影在单位观测向量 I s I^s Is 上,然后除以载波的波长 λ \lambda λ。
-
第二部分:
f d s = − ( v s − v ) ⋅ I s λ f_d^s = -\frac{(v^s - v) \cdot I^s}{\lambda} fds=−λ(vs−v)⋅Is由于速度的相对关系可以互换,公式变为接收机与卫星速度差的相反数。这表示多普勒频移可以由卫星速度与接收机速度之差的投影来计算,方向相反。
-
第三部分:
f d s = − r ˙ λ f_d^s = -\frac{\dot{r}}{\lambda} fds=−λr˙将相对速度的投影用 r ˙ \dot{r} r˙ 表示,公式进一步简化为相对径向速度 r ˙ \dot{r} r˙ 除以波长 λ \lambda λ 的负数。相对径向速度表示接收机与卫星沿观测方向的相对速度。
举例说明
假设:
- 接收机速度 v = 500 v = 500 v=500 米/秒。
- 卫星速度 v s = 7000 v^s = 7000 vs=7000 米/秒。
- 单位观测向量 I s I^s Is 的方向余弦为 0.5 0.5 0.5。
- 载波波长 λ = 0.19 \lambda = 0.19 λ=0.19 米。
-
计算速度投影:
( v − v s ) ⋅ I s = ( 500 − 7000 ) ⋅ 0.5 = − 3250 (v - v^s) \cdot I^s = (500 - 7000) \cdot 0.5 = -3250 (v−vs)⋅Is=(500−7000)⋅0.5=−3250 -
计算多普勒频移:
f d s = − 3250 0.19 ≈ − 17105.26 Hz f_d^s = \frac{-3250}{0.19} \approx -17105.26 \, \text{Hz} fds=0.19−3250≈−17105.26Hz
因此,多普勒频移 f d s f_d^s fds 约为 − 17105.26 -17105.26 −17105.26 Hz,表示接收机相对于卫星的相对径向速度为 3250 3250 3250 米/秒。
附加B:
单位观测向量
单位观测向量(Unit Observation Vector)是指从接收机指向卫星的方向向量,并且其长度为1。它用于描述接收机和卫星之间的相对位置方向,而不考虑距离的大小。
单位观测向量的定义
假设接收机的位置为 r R \mathbf{r}_R rR,卫星的位置为 r S \mathbf{r}_S rS,则从接收机到卫星的观测向量为:
r S R = r S − r R \mathbf{r}_{SR} = \mathbf{r}_S - \mathbf{r}_R rSR=rS−rR
单位观测向量 I s \mathbf{I}^s Is 是该观测向量的单位化结果,即其方向与 r S R \mathbf{r}_{SR} rSR 相同,但长度为1:
I s = r S R ∥ r S R ∥ \mathbf{I}^s = \frac{\mathbf{r}_{SR}}{\|\mathbf{r}_{SR}\|} Is=∥rSR∥rSR
其中:
- I s \mathbf{I}^s Is 是单位观测向量。
- r S R \mathbf{r}_{SR} rSR 是从接收机到卫星的观测向量。
- ∥ r S R ∥ \|\mathbf{r}_{SR}\| ∥rSR∥ 是观测向量的模,即接收机到卫星的距离。
计算单位观测向量的步骤
-
计算观测向量:
首先计算从接收机到卫星的观测向量 r S R \mathbf{r}_{SR} rSR。 -
计算观测向量的模:
计算观测向量的模,即接收机与卫星之间的距离。 -
单位化观测向量:
将观测向量除以其模,得到单位观测向量。
举例说明
假设接收机的位置为 ( x R , y R , z R ) = ( 1000 , 2000 , 3000 ) (x_R, y_R, z_R) = (1000, 2000, 3000) (xR,yR,zR)=(1000,2000,3000) 米,卫星的位置为 ( x S , y S , z S ) = ( 4000 , 5000 , 6000 ) (x_S, y_S, z_S) = (4000, 5000, 6000) (xS,yS,zS)=(4000,5000,6000) 米。
-
计算观测向量:
r S R = r S − r R = ( 4000 − 1000 , 5000 − 2000 , 6000 − 3000 ) = ( 3000 , 3000 , 3000 ) \mathbf{r}_{SR} = \mathbf{r}_S - \mathbf{r}_R = (4000 - 1000, 5000 - 2000, 6000 - 3000) = (3000, 3000, 3000) rSR=rS−rR=(4000−1000,5000−2000,6000−3000)=(3000,3000,3000) -
计算观测向量的模:
∥ r S R ∥ = 300 0 2 + 300 0 2 + 300 0 2 = 27000000 = 3000 3 ≈ 5196.15 m \|\mathbf{r}_{SR}\| = \sqrt{3000^2 + 3000^2 + 3000^2} = \sqrt{27000000} = 3000\sqrt{3} \approx 5196.15 \, \text{m} ∥rSR∥=30002+30002+30002=27000000=30003≈5196.15m -
单位化观测向量:
I s = r S R ∥ r S R ∥ = ( 3000 , 3000 , 3000 ) 5196.15 ≈ ( 0.577 , 0.577 , 0.577 ) \mathbf{I}^s = \frac{\mathbf{r}_{SR}}{\|\mathbf{r}_{SR}\|} = \frac{(3000, 3000, 3000)}{5196.15} \approx (0.577, 0.577, 0.577) Is=∥rSR∥rSR=5196.15(3000,3000,3000)≈(0.577,0.577,0.577)
因此,单位观测向量 I s \mathbf{I}^s Is 约为 ( 0.577 , 0.577 , 0.577 ) (0.577, 0.577, 0.577) (0.577,0.577,0.577)。
单位观测向量在GNSS系统中非常重要,因为它用于计算接收机和卫星之间的相对运动、速度投影以及多普勒频移等关键参数。
第5讲 观测值中与卫星、接收机有关的误差
5.1 卫星轨道误差
由卫星星历所给出的卫星轨道与卫星的实际轨道之差称为卫星轨道误差。从人造卫星轨道理论知:知道了卫星轨道就知道了卫星在空间的位置及运动速度;反之,知道了卫星的位置和运动速度也就知道了卫星的轨道。
因此,上述定义也可表述为:由卫星星历所给出的卫星在空间的位置及运动速度与卫星的实际位置及运动速度之差称为卫星轨道误差。
GNSS卫星的广播星历是由全球定位系统的地面控制部分所确定和提供的,经 GNSS卫星向全球所有用户公开播发的一种预报星历,其精度较差,一般广播星历轨道的精度在米级。
5.2 卫星钟/接收机钟误差
由卫星星历所给出的卫星钟与标准时间之差称为卫星钟误差;同理,接收机钟误差为接收机钟面时与标准时间之差称为接收机钟误差。
5.3 天线相位中心偏差
卫星天线和接收机天线的天线相位中心既不是一个物理点,也不是一个稳定的点,对任何天线,天线相位中心都会随着来自卫星信号方向的变化而变化。观测值测量的是卫星瞬时天线相位中心与接收机瞬时天线相位中心之间的距离。
5.3.1 天线相位中心偏差概念
瞬时天线相位中心:天线的相位中心会随着信号频率、方位角、高度角等变化,在给定信号频率、方位角、高度角的情况下所确定的天线相位中心称为瞬时天线相位中心。
平均天线相位中心:由于天线相位中心会随着频率、方位角、高度角甚至天线罩变化,通常不同条件下的天线相位中心位置取平均值作为平均天线相位中心。
天线相位中心的误差由两部分组成,一部分是相对于天线物理参考点(ARP)的平均相位中心偏差(PCO),另一部分是与高度角和方位角有关的瞬时相位中心变化(PCV)。
5.3.2 天线相位中心偏差修正
对于卫星或者接收机天线相位偏差修正,我们可以通过IGS发布的atx文件。一般只有在精密单点定位中我们需要考虑卫星和接收机的天线相位中心修正。在RTK中,一般可以不修正天线相位中心变化。
5.4 相对论效应
根据狭义相对论和广义相对论,卫星钟的频率将受到其运动速度和引力位的影响。其具体的综合影响为:
Δ t = − c 2 2 ⋅ R ⋅ V c 2 \Delta t = -\frac{c^2}{2} \cdot \frac{R \cdot V}{c^2} Δt=−2c2⋅c2R⋅V
其中 R R R 为卫星瞬时位置向量, V V V 为卫星瞬时速度向量, c c c 为光速, Δ t \Delta t Δt 为卫星钟修正量,单位为秒。
5.5 潮汐改正
5.5.1 地球固体潮
固体潮是指摄动天体(月球、太阳)对弹性地球的引力作用,引起地球表面周期性涨落的现象。固体地球潮汐引起的测站周期性位移与测站所处的纬度有关,在高程方向可达30cm、在水平方向可达5cm。固体地球潮则能通过相对简单的地球模型精确计算出来。
5.5.2 海洋负荷潮
海洋负荷是指在海潮期间由于海水质量重新分布所引起的海床和海岸形变。在海水重量作用下,地壳会发生弹性形变,称为海洋负荷潮。海潮改正比固体潮小一个量级,对精密单点定位单历元解的影响可达5 cm,单天静态定位结果的影响为mm级。当测站与海岸线的距离大于1000km时,海潮的影响可忽略不计。与固体潮影响一样,在精密单点定位中,海潮的影响必须利用模型改正。
5.5.3 极潮
地球的自转轴会在20平方面的范围内漂移(极移),引起地壳的弹性响应,从而导致地球表面测站位置发生变化,这一现象称为极潮。极潮影响在垂向可达 2.5cm,在水平方向上变形可达0.7cm,因此在高精度数据处理中应进行模型改正。采用IERS提供的极潮改正模型,在输入测站经纬度后可以计算得到极潮改正值。
5.6 天线相位缠绕
相位缠绕(Phase Wind-Up)是发射端与接收端之间的相对运动导致的载波相位变化。对GPS系统来说,因为GPS卫星发送的是右旋圆极化(RHCP: Right Hand Circularly Polarized)的信号,在这种情况下,接收机或者卫星天线的旋转会导致载波相位发生改变,这个值可能达到一个载波周期,我们把这种现象叫做相位缠绕。接收机端由于载体/接收机的运动导致的旋转/相位缠绕被接收机钟差吸收掉;因此,在PPP中不予以考虑,只考虑卫星端的相位缠绕。所幸相位缠绕只影响载波相位测量,不影响码相位测量,在非精密定位中可以忽略其影响。对差分定位来说其影响一般也可以忽略,尤其是短基线的时候。然而对精密单点定位来说,其影响就不能忽略了,因其影响可能会达到分米级。
附件A

图示例解释
这张图展示了一个天线校准文件(ANTEX文件)的部分内容。下面是对图中各部分内容的解释:
文件头部
TRM29659.00 SCIS TYPE / SERIAL NO
ROBOT Geo++ GmbH METH / BY / # / DATE
TRM29659.00表示天线类型。SCIS表示天线序列号。ROBOT表示校准方法。Geo++ GmbH表示校准的执行机构。6 29-JAN-17表示校准日期。
天线相位中心偏差(PCO)
5.0
0.0 90.0 5.0
4
5.0表示天线的径向偏差。0.0 90.0 5.0表示天线的方位角、高度角和径向偏差。4表示频率数量。
校准信息
IGS14_2186
IGS14_2186
Number of Calibrated Antennas GPS: 006 COMMENT
Number of Individual Calibrations GPS: 012 COMMENT
Number of Calibrated Antennas GLO: 006 COMMENT
Number of Individual Calibrations GLO: 012 COMMENT
GLONASS PCV (metric) COMMENT
derived from Delta PCV per 25.0 MHz COMMENT
for frequency channel number k=0 COMMENT
IGS14_2186表示校准版本。# Number of Calibrated Antennas GPS: 006表示校准的GPS天线数量。# Number of Individual Calibrations GPS: 012表示单个校准的GPS数量。# Number of Calibrated Antennas GLO: 006表示校准的GLONASS天线数量。# Number of Individual Calibrations GLO: 012表示单个校准的GLONASS数量。# GLONASS PCV (metric)表示GLONASS相位中心变化数据。# derived from Delta PCV per 25.0 MHz表示相位中心变化是每25.0 MHz计算得出。# for frequency channel number k=0表示针对频率通道号k=0的校准数据。
相位中心变化(PCV)
G01
+0.23 +0.65 +87.65
NOAZI
+0.00 -0.31 -1.19 -2.52 -4.15 -5.87 -7.48 -8.80 -9.66 -9.97 -9.67 -8.79 -7.35 -5.36 -2.76 +0.63 +5.04 +10.63 +17.26
0.0 +0.00 -0.30 -1.18 -2.53 -4.17 -5.91 -7.52 -8.82 -9.66 -9.92 -9.57 -8.63 -7.14 -5.14 -2.56 +0.79 +5.15 +10.67 +17.13
5.0 +0.00 -0.30 -1.18 -2.53 -4.17 -5.90 -7.51 -8.81 -9.64 -9.91 -9.56 -8.61 -7.11 -5.09 -2.50 +0.84 +5.19 +10.67 +17.09
10.0 +0.00 -0.31 -1.19 -2.53 -4.16 -5.89 -7.50 -8.80 -9.64 -9.91 -9.55 -8.60 -7.09 -5.06 -2.46 +0.88 +5.20 +10.66 +17.07
15.0 +0.00 -0.31 -1.19 -2.53 -4.16 -5.88 -7.49 -8.79 -9.65 -9.91 -9.57 -8.61 -7.09 -5.05 -2.44 +0.90 +5.20 +10.64 +17.06
20.0 +0.00 -0.31 -1.19 -2.53 -4.16 -5.87 -7.48 -8.79 -9.65 -9.93 -9.59 -8.63 -7.11 -5.05 -2.43 +0.91 +5.20 +10.62 +17.08
25.0 +0.00 -0.31 -1.19 -2.53 -4.16 -5.87 -7.47 -8.78 -9.64 -9.96 -9.63 -8.67 -7.14 -5.07 -2.44 +0.91 +5.20 +10.62 +17.12
G01表示GLONASS卫星01。+0.23 +0.65 +87.65表示初始相位中心变化数据。NOAZI表示没有方位角信息。
每行数据表示在不同高度角(如0度、5度、10度等)下的相位中心变化(PCV)值。
数据解释
- 第一列:高度角(例如:0.0度、5.0度等)。
- 后续列:相位中心变化值,以米为单位。
这些PCV值表示在不同高度角下的相位中心变化,用于精确校准天线的相位中心位置。
应用
这张图中的ANTEX文件数据用于精确校准GNSS系统中的天线相位中心位置,从而提高定位精度和可靠性。通过这些详细的PCV值,可以修正天线在不同高度角下的相位中心位置变化,确保测量结果的准确性。
附件B
相对论效应
根据狭义相对论和广义相对论,卫星钟的频率将受到其运动速度和引力位的影响。相对论效应在GNSS系统中至关重要,因为它会对卫星钟和接收机钟产生显著的时间误差。
相对论效应的基本公式
卫星钟频率受相对论效应影响的综合公式为:
Δ t = − R ⋅ V c 2 \Delta t = -\frac{R \cdot V}{c^2} Δt=−c2R⋅V
其中:
- Δ t \Delta t Δt 是卫星钟修正量,单位为秒。
- R R R 是卫星瞬时位置向量。
- V V V 是卫星瞬时速度向量。
- c c c 是光速,约为 299 , 792 , 458 299,792,458 299,792,458 米/秒。
举例说明
假设一个GPS卫星的瞬时位置向量 R R R 为 26 , 560 26,560 26,560 公里(即 26 , 560 , 000 26,560,000 26,560,000 米),瞬时速度向量 V V V 为 3 , 874 3,874 3,874 米/秒。
-
计算修正量:
Δ t = − R ⋅ V c 2 = − 26 , 560 , 000 × 3 , 874 ( 299 , 792 , 458 ) 2 \Delta t = -\frac{R \cdot V}{c^2} = -\frac{26,560,000 \times 3,874}{(299,792,458)^2} Δt=−c2R⋅V=−(299,792,458)226,560,000×3,874 -
计算分母:
c 2 = ( 299 , 792 , 458 ) 2 ≈ 8.987551787 × 1 0 16 c^2 = (299,792,458)^2 \approx 8.987551787 \times 10^{16} c2=(299,792,458)2≈8.987551787×1016 -
计算分子:
R ⋅ V = 26 , 560 , 000 × 3 , 874 ≈ 1.0284576 × 1 0 11 R \cdot V = 26,560,000 \times 3,874 \approx 1.0284576 \times 10^{11} R⋅V=26,560,000×3,874≈1.0284576×1011 -
计算相对论效应修正量:
Δ t = − 1.0284576 × 1 0 11 8.987551787 × 1 0 16 ≈ − 1.144 × 1 0 − 6 秒 = − 1.144 微秒 \Delta t = -\frac{1.0284576 \times 10^{11}}{8.987551787 \times 10^{16}} \approx -1.144 \times 10^{-6} \text{秒} = -1.144 \text{微秒} Δt=−8.987551787×10161.0284576×1011≈−1.144×10−6秒=−1.144微秒
因此,由于相对论效应,卫星钟需要修正约 (-1.144) 微秒。
相对论效应的重要性
在GNSS系统中,卫星钟的频率和接收机钟的频率都受到相对论效应的影响。如果不进行修正,这些效应会导致定位误差累积,最终影响定位精度。以下是相对论效应的一些重要影响:
- 卫星钟的运动速度影响:根据狭义相对论,运动的卫星钟相对于地面观察者会变慢,这称为时间膨胀效应。
- 引力场的影响:根据广义相对论,处于较强引力场(即靠近地球表面)的钟会走得更慢,而处于较弱引力场(即高轨道卫星)的钟会走得更快。
应用举例
在实际应用中,GNSS系统的地面控制部分会根据相对论效应计算并发布卫星钟的修正参数,接收机在进行定位计算时需要应用这些修正参数。比如,GPS系统中的每颗卫星都会广播一组修正参数,包括卫星钟差、卫星轨道参数等,这些数据被接收机接收并用于计算精确位置。
通过相对论效应的修正,可以显著提高GNSS系统的定位精度,使其满足导航、测绘、科学研究等各种应用的需求。
第6讲 观测值中与信号传播路径有关的误差以及电离层、对流层相关模型
6.1 电离层误差
6.1.1 电离层误差
在太阳紫外线、X射线、γ射线和高能粒子的作用下,电离层中的中性气体分子被电离,产生大量的电子和正离子,从而形成了一个电离区域,高度在60-1000km。
当电磁波穿过充满电子的电离层时,它的传播速度和方向会发生改变,由此造成GNSS测量中的电离层延时误差。
电离层是一种频散性介质,即不同频率的电磁波在电离层中有着不同的传播速度。电离层延时 I I I 与信号频率 f f f 之间的关系可以表示为:
I = I P − I E = 40.28 ⋅ T E C f 2 I = I_P - I_E = 40.28 \cdot \frac{TEC}{f^2} I=IP−IE=40.28⋅f2TEC
式中 I P I_P IP 和 I E I_E IE 分别代表伪距和载波相位测量值中的以米为单位的电离层延时, T E C TEC TEC 代表在信号传播途径上的1米的这种一个管状道空气空间所有包含的电子数总量(TEC)。
T E C = ∫ N e d s TEC = \int N_e \, ds TEC=∫Neds
其中 N e N_e Ne 为电子密度,单位体积内所有包含的电子数。
电离层公式表明了电离层所具有的频相位和波波相位性质,即电离层对伪距测量值 P P P 与载波相位测量值分别造成大小相反等,方向相反的改进误差。
电离层延时误差的一般为几米到几十米,但当太阳黑子严重活动期时,电离层中的电子密度会升高,这使得电离层延时范围的范围更加增加,其值可达十几米,甚至几十米。不同GNSS通常不能忽略电离层引起的对GNSS测量和定位的影响。实际上,电离层延时是GNSS测量中最大误差之一。
举例说明
假设某GPS卫星信号的频率为1.57542 GHz(L1频率),信号传播路径上的总电子含量(TEC)为20 TECU(1 TECU = 1 0 16 10^{16} 1016 电子/m²)。我们需要计算电离层延时误差。
-
计算TEC:
TEC已知为20 TECU,即 20 × 1 0 16 20 \times 10^{16} 20×1016 电子/m²。
-
计算电离层延时误差:
使用公式 I = 40.28 ⋅ T E C f 2 I = 40.28 \cdot \frac{TEC}{f^2} I=40.28⋅f2TEC,其中 f = 1.57542 × 1 0 9 f = 1.57542 \times 10^9 f=1.57542×109 Hz。
先将频率平方:
f 2 = ( 1.57542 × 1 0 9 ) 2 = 2.480 × 1 0 18 f^2 = (1.57542 \times 10^9)^2 = 2.480 \times 10^{18} f2=(1.57542×109)2=2.480×1018
计算电离层延时:
I = 40.28 ⋅ 20 × 1 0 16 2.480 × 1 0 18 I = 40.28 \cdot \frac{20 \times 10^{16}}{2.480 \times 10^{18}} I=40.28⋅2.480×101820×1016
简化计算:
I = 40.28 ⋅ 20 2.480 = 40.28 ⋅ 8.0645 ≈ 324.7 米 I = 40.28 \cdot \frac{20}{2.480} = 40.28 \cdot 8.0645 \approx 324.7 \text{米} I=40.28⋅2.48020=40.28⋅8.0645≈324.7米
因此,电离层对该GPS信号的延时误差约为324.7米。这表示电离层延时误差对伪距测量值有显著影响,需要进行校正以提高定位精度。
应用
在实际应用中,GNSS系统会使用各种电离层模型和校正方法来减小电离层误差对定位精度的影响。例如,使用双频接收机可以通过计算不同频率信号的延时差异来校正电离层误差;单频接收机则可以利用电离层模型(如Klobuchar模型)来进行误差修正。通过这些校正方法,可以显著提高GNSS定位的精度和可靠性。
6.1.2 电离层改正经验模式
表述电离层中的电子密度、电子温度、电子温度、离子温度、离子分数和总电子含量等参数的均为这些参数的空变化规范的的一些数学公式称为电离层模型。常用的计算模式有全高模式模型(Bent模型),国际参考电离层(IRI)模型,Klobuchar模型(克努舒卡模型),GIM模型等。
Bent和IRI模型提供了全球电离层及测站位置的观测资料和用台站的观测和试验验证模式,被电离层研究和无线电通信领域的用户广泛使用。但模型相对复杂,一些参数难以获得,所以卫星导航用户一般不使用此类型模型。
6.1.2.1 Klobuchar模型
GPS导航电文中播发八段经验参数供用户改正电离层,该模型将电离层的电离层时延取平均5ns,把白天的延至电高数系数多余被校改的电部分。
输入参数分别为8个模型系数 α i ( i = 1 , 2 , 3 , 4 ) \alpha_i \, (i = 1, 2, 3, 4) αi(i=1,2,3,4) 和 β i \beta_i βi,GPS天线的大地经度 ϕ \phi ϕ 和大地经度 λ \lambda λ,GPS观测时间 t t t,以及观测卫星的方位角 A A A 和高程角 e e e。
可将电离层改正率改正到60%,为GPS单频用户广泛采用。我国的北斗卫星导航系统也借鉴了Klobuchar模型参数,在中国使用内,其电离层延时修正正确修正率可达70%以上。
举例说明
假设某GPS接收机位于大地经度 ϕ = 4 5 ∘ \phi = 45^\circ ϕ=45∘ 和大地纬度 λ = 9 0 ∘ \lambda = 90^\circ λ=90∘ 处,接收到的导航电文中包含Klobuchar模型的八个参数:
α 0 = 0.0001 , α 1 = 0.0002 , α 2 = − 0.0001 , α 3 = 0.00005 \alpha_0 = 0.0001, \alpha_1 = 0.0002, \alpha_2 = -0.0001, \alpha_3 = 0.00005 α0=0.0001,α1=0.0002,α2=−0.0001,α3=0.00005
β 0 = 100000 , β 1 = − 200000 , β 2 = 150000 , β 3 = − 50000 \beta_0 = 100000, \beta_1 = -200000, \beta_2 = 150000, \beta_3 = -50000 β0=100000,β1=−200000,β2=150000,β3=−50000
假设观测时间 t = 36000 t = 36000 t=36000 秒,观测卫星的方位角 A = 3 0 ∘ A = 30^\circ A=30∘ 和高程角 e = 4 5 ∘ e = 45^\circ e=45∘。
-
计算地理位置的地磁纬度 ψ \psi ψ:
ψ = ϕ + 0.064 ⋅ cos ( A − λ ) \psi = \phi + 0.064 \cdot \cos(A - \lambda) ψ=ϕ+0.064⋅cos(A−λ)ψ = 4 5 ∘ + 0.064 ⋅ cos ( 3 0 ∘ − 9 0 ∘ ) = 4 5 ∘ + 0.064 ⋅ cos ( − 6 0 ∘ ) ≈ 4 5 ∘ + 0.032 ≈ 45.03 2 ∘ \psi = 45^\circ + 0.064 \cdot \cos(30^\circ - 90^\circ) = 45^\circ + 0.064 \cdot \cos(-60^\circ) \approx 45^\circ + 0.032 \approx 45.032^\circ ψ=45∘+0.064⋅cos(30∘−90∘)=45∘+0.064⋅cos(−60∘)≈45∘+0.032≈45.032∘
-
计算地磁纬度的归一化值 ψ u \psi_u ψu:
ψ u = ψ 18 0 ∘ = 45.032 180 ≈ 0.2502 \psi_u = \frac{\psi}{180^\circ} = \frac{45.032}{180} \approx 0.2502 ψu=180∘ψ=18045.032≈0.2502
-
计算电离层改正延时的振幅和周期:
振幅 A M P AMP AMP:
A M P = α 0 + α 1 ψ u + α 2 ψ u 2 + α 3 ψ u 3 AMP = \alpha_0 + \alpha_1 \psi_u + \alpha_2 \psi_u^2 + \alpha_3 \psi_u^3 AMP=α0+α1ψu+α2ψu2+α3ψu3
A M P = 0.0001 + 0.0002 ⋅ 0.2502 − 0.0001 ⋅ ( 0.2502 ) 2 + 0.00005 ⋅ ( 0.2502 ) 3 ≈ 0.0001 + 0.00005 − 0.00000625 + 0.00000031 ≈ 0.00014406 AMP = 0.0001 + 0.0002 \cdot 0.2502 - 0.0001 \cdot (0.2502)^2 + 0.00005 \cdot (0.2502)^3 \approx 0.0001 + 0.00005 - 0.00000625 + 0.00000031 \approx 0.00014406 AMP=0.0001+0.0002⋅0.2502−0.0001⋅(0.2502)2+0.00005⋅(0.2502)3≈0.0001+0.00005−0.00000625+0.00000031≈0.00014406
周期 P E R PER PER:
P E R = β 0 + β 1 ψ u + β 2 ψ u 2 + β 3 ψ u 3 PER = \beta_0 + \beta_1 \psi_u + \beta_2 \psi_u^2 + \beta_3 \psi_u^3 PER=β0+β1ψu+β2ψu2+β3ψu3
P E R = 100000 − 200000 ⋅ 0.2502 + 150000 ⋅ ( 0.2502 ) 2 − 50000 ⋅ ( 0.2502 ) 3 ≈ 100000 − 50050 + 9375 − 1562.5 ≈ 58262.5 秒 PER = 100000 - 200000 \cdot 0.2502 + 150000 \cdot (0.2502)^2 - 50000 \cdot (0.2502)^3 \approx 100000 - 50050 + 9375 - 1562.5 \approx 58262.5 \text{秒} PER=100000−200000⋅0.2502+150000⋅(0.2502)2−50000⋅(0.2502)3≈100000−50050+9375−1562.5≈58262.5秒
-
计算电离层延时改正值:
归一化观测时间 t u t_u tu:
t u = t − 50400 43200 t_u = \frac{t - 50400}{43200} tu=43200t−50400
当 ∣ t u ∣ < 0.5 |t_u| < 0.5 ∣tu∣<0.5 时:
I c o r r = A M P ⋅ ( 1 − t u 2 ) ⋅ cos ( 2 π t u P E R ) I_{corr} = AMP \cdot \left(1 - t_u^2 \right) \cdot \cos \left( \frac{2 \pi t_u}{PER} \right) Icorr=AMP⋅(1−tu2)⋅cos(PER2πtu)
假设 t = 36000 t = 36000 t=36000 秒:
t u = 36000 − 50400 43200 = − 0.3333 t_u = \frac{36000 - 50400}{43200} = -0.3333 tu=4320036000−50400=−0.3333
计算电离层延时改正值 I c o r r I_{corr} Icorr:
I c o r r = 0.00014406 ⋅ ( 1 − ( − 0.3333 ) 2 ) ⋅ cos ( 2 π ⋅ ( − 0.3333 ) 58262.5 ) I_{corr} = 0.00014406 \cdot \left(1 - (-0.3333)^2 \right) \cdot \cos \left( \frac{2 \pi \cdot (-0.3333)}{58262.5} \right) Icorr=0.00014406⋅(1−(−0.3333)2)⋅cos(58262.52π⋅(−0.3333))
I c o r r = 0.00014406 ⋅ ( 1 − 0.1111 ) ⋅ cos ( − 0.000036 ) ≈ 0.00014406 ⋅ 0.8889 ≈ 0.0001281 米 I_{corr} = 0.00014406 \cdot (1 - 0.1111) \cdot \cos \left( -0.000036 \right) \approx 0.00014406 \cdot 0.8889 \approx 0.0001281 \text{米} Icorr=0.00014406⋅(1−0.1111)⋅cos(−0.000036)≈0.00014406⋅0.8889≈0.0001281米
因此,通过Klobuchar模型,计算出的电离层延时改正值约为0.0001281米。通过这样的改正,可以提高单频GPS接收机的定位精度。
应用
在实际应用中,单频GPS接收机会根据导航电文中的Klobuchar模型参数,结合观测时间和位置,计算电离层延时改正值,并应用于伪距测量值,从而提高定位精度。这种方法在大多数情况下能够显著减小电离层误差,提升定位性能。
6.1.2.2 GIM模型
全球电离层地图(Global Ionosphere Maps, GIM)模型是由国际GNSS服务(IGS)发布的一种电离层延迟改正模型。GIM模型通过全球GNSS观测数据,采用特定的算法和数据处理方法生成电离层总电子含量(TEC)的全球分布图。这些地图以IONEX格式存储,并可以从IGS数据中心下载使用。
GIM模型能够将电离层延迟改正的精度提高到80%以上,适用于高精度GNSS定位应用。
举例说明
假设我们要使用GIM模型进行电离层延迟改正,具体步骤如下:
-
下载GIM数据:
从IGS数据中心下载最新的IONEX格式的GIM数据文件。文件中包含了全球范围内的TEC分布信息。
-
提取观测位置的TEC值:
假设我们在位置 ( ϕ , λ ) = ( 4 5 ∘ N , 9 0 ∘ E ) (\phi, \lambda) = (45^\circ N, 90^\circ E) (ϕ,λ)=(45∘N,90∘E) 处进行观测,时间为某天的12:00 UTC。通过查找GIM数据文件,找到对应时间和位置的TEC值。
假设查找到的TEC值为20 TECU(1 TECU = 1 0 16 10^{16} 1016 电子/m²)。
-
计算电离层延迟:
使用GIM模型计算电离层延迟。电离层延迟 I I I 可以通过TEC值和信号频率 f f f 计算得到:
I = 40.28 ⋅ T E C f 2 I = 40.28 \cdot \frac{TEC}{f^2} I=40.28⋅f2TEC
假设观测信号的频率为 f = 1.57542 f = 1.57542 f=1.57542 GHz(L1频率)。
-
计算频率的平方:
f 2 = ( 1.57542 × 1 0 9 ) 2 = 2.480 × 1 0 18 f^2 = (1.57542 \times 10^9)^2 = 2.480 \times 10^{18} f2=(1.57542×109)2=2.480×1018
-
计算电离层延迟:
I = 40.28 ⋅ 20 × 1 0 16 2.480 × 1 0 18 I = 40.28 \cdot \frac{20 \times 10^{16}}{2.480 \times 10^{18}} I=40.28⋅2.480×101820×1016
简化计算:
I = 40.28 ⋅ 20 2.480 = 40.28 ⋅ 8.0645 ≈ 324.7 米 I = 40.28 \cdot \frac{20}{2.480} = 40.28 \cdot 8.0645 \approx 324.7 \text{米} I=40.28⋅2.48020=40.28⋅8.0645≈324.7米
因此,通过GIM模型计算出的电离层延迟约为324.7米。通过这个延迟值,可以对GNSS观测数据进行校正,以提高定位精度。
应用
在实际应用中,GNSS接收机会定期下载和更新GIM数据文件,并根据观测时间和位置提取相应的TEC值,计算电离层延迟,并应用于伪距测量值的校正。GIM模型由于其高精度和全球适用性,被广泛应用于高精度GNSS定位和导航中。
通过使用GIM模型,可以显著减小电离层误差,提高定位的精度和可靠性。这对于需要高精度定位的应用场景,如地理测绘、精密农业和科学研究等,具有重要意义。
6.1.3 电离层双频组合模型
电离层误差是与信号频率的平方成反比的。如果卫星能同时用两种频率发射信号,那么这两种不同频率的信号就会沿着相同的路径传到接收机。GNSS卫星之所以采用两种频率来发送信号,主要是由于电离层的频散性。
假设伪距双频电离层误差组合为:
P = ρ + I P P = \rho + I_P P=ρ+IP
其中 ρ \rho ρ 是伪距观测值, ρ \rho ρ 为卫星到接收机之间的真实距离, I P I_P IP 为伪距的电离层延迟。
已知 I P = 40.28 ⋅ T E C f 2 = A f 2 I_P = 40.28 \cdot \frac{TEC}{f^2} = \frac{A}{f^2} IP=40.28⋅f2TEC=f2A,其中 A = 40.28 ⋅ T E C A = 40.28 \cdot TEC A=40.28⋅TEC。
那么无电离层组合伪距观测值:
P 3 = m P 1 + n P 2 P_3 = mP_1 + nP_2 P3=mP1+nP2
其中 P 1 P_1 P1 和 P 2 P_2 P2 分别为第一频和第二频观测值, m m m 和 n n n 分别为其组合系数。
P 3 = ( m + n ) ρ + m I P 1 + n I P 2 = ( m + n ) ρ + A ( m f 1 2 + n f 2 2 ) P_3 = (m + n) \rho + m I_{P_1} + n I_{P_2} = (m + n) \rho + A \left( \frac{m}{f_1^2} + \frac{n}{f_2^2} \right) P3=(m+n)ρ+mIP1+nIP2=(m+n)ρ+A(f12m+f22n)
有以下方程:
{ m + n = 1 m f 1 2 + n f 2 2 = 0 \begin{cases} m + n = 1 \\ \frac{m}{f_1^2} + \frac{n}{f_2^2} = 0 \end{cases} {m+n=1f12m+f22n=0
即:
{ m = f 1 2 f 1 2 − f 2 2 n = − f 2 2 f 1 2 − f 2 2 \begin{cases} m = \frac{f_1^2}{f_1^2 - f_2^2} \\ n = -\frac{f_2^2}{f_1^2 - f_2^2} \end{cases} ⎩ ⎨ ⎧m=f12−f22f12n=−f12−f22f22
那么无电离层组合伪距观测值:
P 3 = f 1 2 f 1 2 − f 2 2 P 1 − f 2 2 f 1 2 − f 2 2 P 2 P_3 = \frac{f_1^2}{f_1^2 - f_2^2} P_1 - \frac{f_2^2}{f_1^2 - f_2^2} P_2 P3=f12−f22f12P1−f12−f22f22P2
即无电离层组合伪距值,但已消除了电离层一次项的影响。
举例说明
假设一个GNSS系统使用两个频率来发送信号,频率分别为 f 1 = 1.57542 f_1 = 1.57542 f1=1.57542 GHz (L1) 和 f 2 = 1.22760 f_2 = 1.22760 f2=1.22760 GHz (L2)。假设接收到的伪距观测值为 P 1 = 20200 P_1 = 20200 P1=20200 米 和 P 2 = 20250 P_2 = 20250 P2=20250 米,TEC为10 TECU。
-
计算组合系数 m m m 和 n n n:
频率的平方为:
f 1 2 = ( 1.57542 × 1 0 9 ) 2 = 2.480 × 1 0 18 f_1^2 = (1.57542 \times 10^9)^2 = 2.480 \times 10^{18} f12=(1.57542×109)2=2.480×1018
f 2 2 = ( 1.22760 × 1 0 9 ) 2 = 1.507 × 1 0 18 f_2^2 = (1.22760 \times 10^9)^2 = 1.507 \times 10^{18} f22=(1.22760×109)2=1.507×1018
计算组合系数:
m = f 1 2 f 1 2 − f 2 2 = 2.480 × 1 0 18 2.480 × 1 0 18 − 1.507 × 1 0 18 = 2.480 0.973 ≈ 2.549 m = \frac{f_1^2}{f_1^2 - f_2^2} = \frac{2.480 \times 10^{18}}{2.480 \times 10^{18} - 1.507 \times 10^{18}} = \frac{2.480}{0.973} \approx 2.549 m=f12−f22f12=2.480×1018−1.507×10182.480×1018=0.9732.480≈2.549
n = − f 2 2 f 1 2 − f 2 2 = − 1.507 × 1 0 18 2.480 × 1 0 18 − 1.507 × 1 0 18 = − 1.507 0.973 ≈ − 1.549 n = -\frac{f_2^2}{f_1^2 - f_2^2} = -\frac{1.507 \times 10^{18}}{2.480 \times 10^{18} - 1.507 \times 10^{18}} = -\frac{1.507}{0.973} \approx -1.549 n=−f12−f22f22=−2.480×1018−1.507×10181.507×1018=−0.9731.507≈−1.549
-
计算无电离层组合伪距观测值:
P 3 = m P 1 + n P 2 = 2.549 × 20200 − 1.549 × 20250 P_3 = mP_1 + nP_2 = 2.549 \times 20200 - 1.549 \times 20250 P3=mP1+nP2=2.549×20200−1.549×20250
计算结果:
P 3 = 51549.8 − 31391.25 ≈ 20158.55 米 P_3 = 51549.8 - 31391.25 \approx 20158.55 \text{米} P3=51549.8−31391.25≈20158.55米
因此,通过双频组合,可以消除电离层一次项的影响,得到无电离层误差的伪距观测值为 20158.55 米。
应用
在实际应用中,GNSS系统会使用双频接收机,通过接收L1和L2频率信号,计算双频组合观测值,以消除电离层误差。这种方法在高精度测量和定位中非常重要,能够显著提高定位精度。
6.2 对流层误差及其改正
对流层定义为海拔低于50km以下未被电离中的中性大气层。与电离层不同,对频率30GHz以下的电磁波信号,对流层基本上是非色散介质,即信号折射与信号频率无关。
无对流层改正的方法是将对流层延迟,只能通过出信信号传播路径上的大气折射系数,然后进行积分计算对流层延迟改正。无对流层改正值的对流层延迟约为2mm,并且随信号发出时天气的影响而增加误差。
对卫星高度角低于15度的卫星,GPS信号的对流层延迟可以达到数米。一般来讲,对流层延迟与温度、气压、湿度以及GPS天线的位置高度有关。
对流层延迟分为干延迟和湿延迟,干延迟值可达2.4m,静力延迟可用如下公式直接使用大气层的气压值计算出来。
另一部分为复杂的湿分量,它所引起的天顶延迟约为0.4m。由于水气的空气变化的复杂性,这使得难以精确计算湿分量。
常用的对流层改正模型有:Saastamoinen模型、Hopfield模型、Black模型等。
6.2.1 Saastamoinen模型
Saastamoinen模型是一种常用的对流层延迟改正模型,它通过气压、温度、湿度等参数计算对流层延迟。该模型可以使用测量值或由标准大气模型得到的值进行计算。
Saastamoinen模型公式
Saastamoinen模型的公式为:
δ ρ t r o p = 0.002277 cos z ( P + ( 1255 T + 0.05 ) e − B tan 2 z ) + δ R \delta \rho_{trop} = \frac{0.002277}{\cos z} \left( P + \left( \frac{1255}{T} + 0.05 \right) e - B \tan^2 z \right) + \delta R δρtrop=cosz0.002277(P+(T1255+0.05)e−Btan2z)+δR
其中:
- δ ρ t r o p \delta \rho_{trop} δρtrop 为对流层延迟,单位为米。
- z z z 为卫星高度角。
- P P P 为地面气压,单位为mbar。
- T T T 为测站温度,单位为摄氏度。
- T ( K ) = T ( C ) + 273.16 T(K) = T(C) + 273.16 T(K)=T(C)+273.16 为温度的开尔文值。
- e e e 为水气压,单位为mbar。
- e s ( T ) e_s(T) es(T) 为水汽压饱和值。
- R h R_h Rh 为相对湿度。
- B B B 和 δ R \delta R δR 为改正项。
举例说明
假设某GNSS测站的参数如下:
- 测站气压 P = 1013.25 P = 1013.25 P=1013.25 mbar(标准大气压)。
- 测站温度 T = 2 0 ∘ C T = 20^\circ C T=20∘C。
- 相对湿度 R h = 50 % R_h = 50\% Rh=50%。
- 卫星高度角 z = 3 0 ∘ z = 30^\circ z=30∘。
-
计算温度的开尔文值:
T ( K ) = T ( C ) + 273.16 = 20 + 273.16 = 293.16 K T(K) = T(C) + 273.16 = 20 + 273.16 = 293.16 \, K T(K)=T(C)+273.16=20+273.16=293.16K
-
计算水汽压饱和值 e s ( T ) e_s(T) es(T):
e s ( T ) = 6.108 × exp ( 17.15 × 20 234.7 + 20 ) ≈ 6.108 × exp ( 1.437 ) ≈ 23.369 m b a r e_s(T) = 6.108 \times \exp \left( \frac{17.15 \times 20}{234.7 + 20} \right) \approx 6.108 \times \exp (1.437) \approx 23.369 \, mbar es(T)=6.108×exp(234.7+2017.15×20)≈6.108×exp(1.437)≈23.369mbar
-
计算实际水汽压 e e e:
e = R h × e s ( T ) = 0.5 × 23.369 ≈ 11.6845 m b a r e = R_h \times e_s(T) = 0.5 \times 23.369 \approx 11.6845 \, mbar e=Rh×es(T)=0.5×23.369≈11.6845mbar
-
计算对流层延迟 δ ρ t r o p \delta \rho_{trop} δρtrop:
首先计算 cos z \cos z cosz 和 tan 2 z \tan^2 z tan2z:
cos 3 0 ∘ = 3 2 ≈ 0.866 \cos 30^\circ = \frac{\sqrt{3}}{2} \approx 0.866 cos30∘=23≈0.866
tan 3 0 ∘ = 1 3 ≈ 0.577 \tan 30^\circ = \frac{1}{\sqrt{3}} \approx 0.577 tan30∘=31≈0.577
tan 2 3 0 ∘ ≈ 0.57 7 2 ≈ 0.333 \tan^2 30^\circ \approx 0.577^2 \approx 0.333 tan230∘≈0.5772≈0.333
将这些值代入Saastamoinen模型公式:
δ ρ t r o p = 0.002277 0.866 ( 1013.25 + ( 1255 293.16 + 0.05 ) × 11.6845 − B × 0.333 ) + δ R \delta \rho_{trop} = \frac{0.002277}{0.866} \left( 1013.25 + \left( \frac{1255}{293.16} + 0.05 \right) \times 11.6845 - B \times 0.333 \right) + \delta R δρtrop=0.8660.002277(1013.25+(293.161255+0.05)×11.6845−B×0.333)+δR
其中,假设 B ≈ 0 B \approx 0 B≈0, δ R ≈ 0 \delta R \approx 0 δR≈0,简化计算:
δ ρ t r o p = 0.002277 0.866 ( 1013.25 + ( 1255 293.16 + 0.05 ) × 11.6845 ) \delta \rho_{trop} = \frac{0.002277}{0.866} \left( 1013.25 + \left( \frac{1255}{293.16} + 0.05 \right) \times 11.6845 \right) δρtrop=0.8660.002277(1013.25+(293.161255+0.05)×11.6845)
计算内部值:
1255 293.16 ≈ 4.281 \frac{1255}{293.16} \approx 4.281 293.161255≈4.281
4.281 + 0.05 ≈ 4.331 4.281 + 0.05 \approx 4.331 4.281+0.05≈4.331
4.331 × 11.6845 ≈ 50.644 4.331 \times 11.6845 \approx 50.644 4.331×11.6845≈50.644
将这些值代入公式:
δ ρ t r o p = 0.002277 0.866 ( 1013.25 + 50.644 ) ≈ 0.002277 0.866 × 1063.894 ≈ 2.796 m \delta \rho_{trop} = \frac{0.002277}{0.866} \left( 1013.25 + 50.644 \right) \approx \frac{0.002277}{0.866} \times 1063.894 \approx 2.796 \, m δρtrop=0.8660.002277(1013.25+50.644)≈0.8660.002277×1063.894≈2.796m
因此,通过Saastamoinen模型计算出的对流层延迟约为2.796米。通过这个延迟值,可以对GNSS观测数据进行校正,以提高定位精度。
应用
在实际应用中,GNSS接收机会根据测站的气压、温度、湿度等参数,利用Saastamoinen模型计算对流层延迟,并应用于伪距测量值的校正。通过这种方式,可以显著减小对流层误差,提高定位的精度和可靠性。这对于高精度定位应用,如地理测绘、科学研究和精密农业等,具有重要意义。
6.3 多路径效应
在GPS测量中,若测地点周围有如树林、建筑物等一次或多次反射的卫星信号,如果进入接收天线,将与直接来自卫星的信号产生干涉,从而使得观测值偏离真实值,产生的误差称为多路径误差。
削弱多路径效应的方法:
- 选择合适的地方,天线安装尽量避开强反射物(如水面、山坡、高层建筑物等)
- 选择合适的GPS接收机及天线,选用防多路径效应的天线(如防流圈天线等)
- 适当延长观测时间
第7讲 观测值公式表示及定位技术简介
7.1 观测值公式
观测值是GNSS定位技术中的核心参数,它们决定了定位精度和可靠性。常见的观测值包括伪距观测值和载波观测值。
7.1.1 伪距观测值
伪距观测值公式表示为:
P r s = ρ r s − c δ t s + c δ t r + I r s + T r s + ε P P^s_r = \rho^s_r - c\delta t^s + c\delta t_r + I^s_r + T^s_r + \varepsilon_P Prs=ρrs−cδts+cδtr+Irs+Trs+εP
其中:
- P r s P^s_r Prs 为卫星 s s s 到接收机 r r r 的伪距观测值。
- ρ r s \rho^s_r ρrs 为卫星 s s s 到接收机 r r r 的真实距离。
- c c c 为光速。
- δ t s \delta t^s δts 为卫星钟差。
- δ t r \delta t_r δtr 为接收机钟差。
- I r s I^s_r Irs 为电离层延迟。
- T r s T^s_r Trs 为对流层延迟。
- ε P \varepsilon_P εP 为伪距观测值噪声,单位为米。
举例说明
假设某GNSS接收机接收到来自某卫星的伪距观测值 P r s = 20200000 P^s_r = 20200000 Prs=20200000 米,已知:
- ρ r s = 20185000 \rho^s_r = 20185000 ρrs=20185000 米
- δ t s − δ t r = 50 \delta t^s - \delta t_r = 50 δts−δtr=50 纳秒(1 纳秒 = 1 0 − 9 10^{-9} 10−9 秒)
- I r s = 3 I^s_r = 3 Irs=3 米
- T r s = 2 T^s_r = 2 Trs=2 米
将这些值代入公式:
P r s = ρ r s − c δ t s + c δ t r + I r s + T r s + ε P P^s_r = \rho^s_r - c\delta t^s + c\delta t_r + I^s_r + T^s_r + \varepsilon_P Prs=ρrs−cδts+cδtr+Irs+Trs+εP
其中 c = 299792458 c = 299792458 c=299792458 米/秒,所以:
P r s = 20185000 − 299792458 × 50 × 1 0 − 9 + 3 + 2 + ε P P^s_r = 20185000 - 299792458 \times 50 \times 10^{-9} + 3 + 2 + \varepsilon_P Prs=20185000−299792458×50×10−9+3+2+εP
P r s = 20185000 − 14.989623 + 3 + 2 + ε P P^s_r = 20185000 - 14.989623 + 3 + 2 + \varepsilon_P Prs=20185000−14.989623+3+2+εP
假设噪声 ε P \varepsilon_P εP 很小,可以忽略不计:
P r s ≈ 20185000 − 14.99 + 3 + 2 = 20184990.01 P^s_r \approx 20185000 - 14.99 + 3 + 2 = 20184990.01 Prs≈20185000−14.99+3+2=20184990.01 米
因此,计算得到的伪距观测值约为20184990.01米,接近接收到的20200000米。
7.1.2 载波观测值
载波观测值公式表示为:
Φ r s = ρ r s − c δ t s + c δ t r − I r s + T r s + λ N r s + ε L \Phi^s_r = \rho^s_r - c\delta t^s + c\delta t_r - I^s_r + T^s_r + \lambda N^s_r + \varepsilon_L Φrs=ρrs−cδts+cδtr−Irs+Trs+λNrs+εL
其中:
- Φ r s \Phi^s_r Φrs 为卫星 s s s 到接收机 r r r 的载波观测值
- λ \lambda λ 为波长
- N r s N^s_r Nrs 为整周模糊度
- ε L \varepsilon_L εL 为载波观测噪声
单位为米。
举例说明
假设某GNSS接收机接收到来自某卫星的载波观测值 Φ r s = 20185020 \Phi^s_r = 20185020 Φrs=20185020 米,已知:
- ρ r s = 20185000 \rho^s_r = 20185000 ρrs=20185000 米
- δ t s − δ t r = 50 \delta t^s - \delta t_r = 50 δts−δtr=50 纳秒(1 纳秒 = 1 0 − 9 10^{-9} 10−9 秒)
- I r s = 3 I^s_r = 3 Irs=3 米
- T r s = 2 T^s_r = 2 Trs=2 米
- λ = 0.19 \lambda = 0.19 λ=0.19 米
- N r s = 1 N^s_r = 1 Nrs=1
将这些值代入公式:
Φ r s = ρ r s − c δ t s + c δ t r − I r s + T r s + λ N r s + ε L \Phi^s_r = \rho^s_r - c\delta t^s + c\delta t_r - I^s_r + T^s_r + \lambda N^s_r + \varepsilon_L Φrs=ρrs−cδts+cδtr−Irs+Trs+λNrs+εL
其中 c = 299792458 c = 299792458 c=299792458 米/秒,所以:
Φ r s = 20185000 − 299792458 × 50 × 1 0 − 9 + 3 + 2 + 0.19 × 1 + ε L \Phi^s_r = 20185000 - 299792458 \times 50 \times 10^{-9} + 3 + 2 + 0.19 \times 1 + \varepsilon_L Φrs=20185000−299792458×50×10−9+3+2+0.19×1+εL
Φ r s = 20185000 − 14.989623 + 3 + 2 + 0.19 + ε L \Phi^s_r = 20185000 - 14.989623 + 3 + 2 + 0.19 + \varepsilon_L Φrs=20185000−14.989623+3+2+0.19+εL
假设噪声 ε L \varepsilon_L εL 很小,可以忽略不计:
Φ r s ≈ 20185000 − 14.99 + 3 + 2 + 0.19 = 20185000 − 9.99 + 0.19 = 20184990.01 + 0.19 = 20184990.20 米 \Phi^s_r \approx 20185000 - 14.99 + 3 + 2 + 0.19 = 20185000 - 9.99 + 0.19 = 20184990.01 + 0.19 = 20184990.20 \text{米} Φrs≈20185000−14.99+3+2+0.19=20185000−9.99+0.19=20184990.01+0.19=20184990.20米
因此,计算得到的载波观测值约为20184990.20米,接近接收到的20185020米。
7.2 定位技术简介
卫星定位导航,要搜到4颗以上的卫星才行?_哔哩哔哩_bilibili
GNSS定位技术分为单点定位、相对定位和精密单点定位。
7.2.1 单点定位技术
单点定位技术(Single Point Positioning, SPP),是指仅使用伪距观测值,不使用其他的辅助信息获取绝对坐标的定位技术。单点定位技术使用广播星历计算定位结果,考虑到钟差的米级精度,所以其误差在1米级别,适用于一般的导航和定位需求。
7.2.2 相对定位技术
无人机RTK定位技术_哔哩哔哩_bilibili
相对定位技术分为两种:一种是仅伪距差分定位,称为RTD技术(Real Time Differential);另一种是载波相位差分定位,称为RTK技术(Real Time Kinematic)。这两种技术都需要基准站和流动站的配合,可以得到厘米级的实时定位精度。
7.2.3 精密单点定位技术
精密单点定位技术(Precise Point Positioning, PPP)类似于单点定位技术,可以使用单台接收机在全球任意位置获得高精度的绝对坐标。为了达到高精度的定位结果,需要使用精密的卫星轨道和钟差改正产品,对流层和电离层误差进行校正。使用PPP技术可以实现厘米级到分米级的定位精度。
7.2.4 技术对比
| 技术类型 | 钟差误差 | 电离层 | 对流层 | 天线相位偏差 | 相对论效应 | 潮汐改正 |
|---|---|---|---|---|---|---|
| SPP | 不考虑 | 模型 | 模型 | 无 | 模型 | 不考虑 |
| RTK | 站间单差 | 站间单差 | 站间单差 | 模型 | 站间单差 | 模型 |
| PPP | 使用精密产品 | 无电离层组合/多频计算 | 模型 + 精密估计 | 模型 | 模型 | 模型 |
通过以上对比,可以看出不同定位技术在误差处理和改正方面的差异,选择合适的定位技术可以根据具体的应用需求和精度要求。
deo/BV1u34y1Z7k5/?spm_id_from=333.337.search-card.all.click&vd_source=8be0807acdf0dd6e93d867c9ac6a7677)
GNSS定位技术分为单点定位、相对定位和精密单点定位。
7.2.1 单点定位技术
单点定位技术(Single Point Positioning, SPP),是指仅使用伪距观测值,不使用其他的辅助信息获取绝对坐标的定位技术。单点定位技术使用广播星历计算定位结果,考虑到钟差的米级精度,所以其误差在1米级别,适用于一般的导航和定位需求。
7.2.2 相对定位技术
无人机RTK定位技术_哔哩哔哩_bilibili
相对定位技术分为两种:一种是仅伪距差分定位,称为RTD技术(Real Time Differential);另一种是载波相位差分定位,称为RTK技术(Real Time Kinematic)。这两种技术都需要基准站和流动站的配合,可以得到厘米级的实时定位精度。
7.2.3 精密单点定位技术
精密单点定位技术(Precise Point Positioning, PPP)类似于单点定位技术,可以使用单台接收机在全球任意位置获得高精度的绝对坐标。为了达到高精度的定位结果,需要使用精密的卫星轨道和钟差改正产品,对流层和电离层误差进行校正。使用PPP技术可以实现厘米级到分米级的定位精度。
7.2.4 技术对比
| 技术类型 | 钟差误差 | 电离层 | 对流层 | 天线相位偏差 | 相对论效应 | 潮汐改正 |
|---|---|---|---|---|---|---|
| SPP | 不考虑 | 模型 | 模型 | 无 | 模型 | 不考虑 |
| RTK | 站间单差 | 站间单差 | 站间单差 | 模型 | 站间单差 | 模型 |
| PPP | 使用精密产品 | 无电离层组合/多频计算 | 模型 + 精密估计 | 模型 | 模型 | 模型 |
通过以上对比,可以看出不同定位技术在误差处理和改正方面的差异,选择合适的定位技术可以根据具体的应用需求和精度要求。
第8讲 观测数据存储、星历存储以及通信格式说明
本讲主要涉及输⼊以及输出。即我们的卫星观测数据以及星历数据的存储格式,实时通信格式以及最后的定位结果输出格式等。主
要涉及RINEX、RTCM、NMEA以及⼀些开源软件的⾃有格式。
8.1 RINEX格式
GNSS观测数据从接收机通过专用软件传输到计算机中,以接收机厂商所定义的专有文件格式以二进制的形式存储。不同GNSS接收机厂商所定义的专有格式各不相同,有时甚至同一厂商不同产品型号格式也不相同。
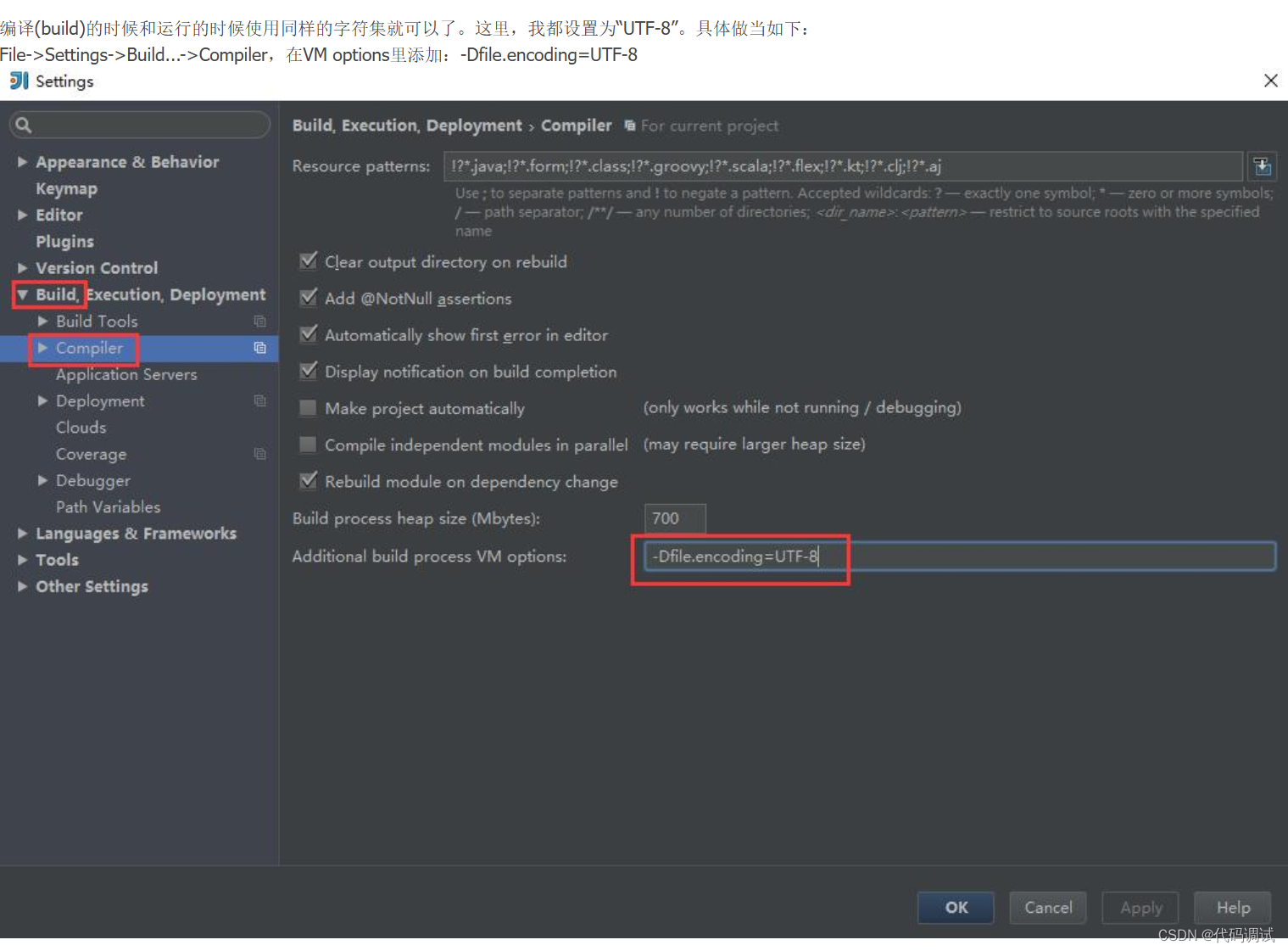
为解决这一问题,1989年提出了RINEX(Receiver Independent Exchange Format,接收机自主交换格式)格式,如今已经成为了GNSS测量应用的标准数据格式。值得一提的是,2016年在RINEX3.03版中全面支持BDS。目前RINEX已经在2021年12月更新至4.00版本。
数据下载
IGS官方产品及数据下载地址汇总——亲验可用(2022.08.05持续更新)_怎样访问igs的gim产品-CSDN博客
8.1.1 RINEX 2.x & 3.x版本
8.1.1.1 文件分类和命名
RINEX 2.x版本刚发布时,由于仅有GPS和GLONASS系统,所以在协议制定时考虑不太全面。
对于常用的,一般就三种文件:
- 观测数据文件;
- 导航(星历)文件;
- 气象数据文件。
对于2.x版本:
文件命名规则:ssssdddf.yyt。其中ssss表示测站名;ddd表示年积日;f表示一个字符一天内的文件序号(时段号),f=0:文件包含当天所有观测数据;yy表示年份后两位,如2022则yy为22;t表示数据类型,如o(观测数据文件)、n(导航文件)、m(气象数据文件)、p(多系统星历文件)等。
对于3.x版本:
包含两种扩展名:.rnx 表示标准的 RINEX 文件;.crx 表示压缩过的 Compact RINEX 格式。crx格式和rnx格式可通过发布的工具进行转换,具体使用请百度。
命名格式如下:
_.
<SITE>为四个字符的观测站点名;<RN>为接收机的编号;<CRC>为三位 ISO 3166-1 标准的国家和地区代码,标识站点位置;<S>为数据源,即数据来源于接收机(R)还是数据流(S);<YEARDOYHRMN>为观测开始时刻:年、年积日、时、分;<LEN>为观测时段的长度;<FRQ>为观测时的采样间隔或采样频率(星历文件无此项);<ST>为包含的卫星系统和数据类型,第一位表示卫星系统(M、G、R、C、E、J、I);第二位为数据类型,即观测文件(O)、导航文件(N)或气象文件(M);<FMT>为扩展名,扩展名只有两种:rnx 或 crx。
8.1.1.2 观测文件
考虑到2.x格式太过古老,在此我们介绍3.x格式的观测数据文件。
观测值文件 header 介绍:
| 标签 | 描述 |
|---|---|
| RINEX VERSION / TYPE | Rinex 格式相关 |
| PGM / RUN BY / DATE | 产生机构相关 |
| MARKER NAME | 站点名字 |
| MARKER NUMBER | 站点编号 |
| MARKER TYPE | 站点类型 |
| OBSERVER / AGENCY | 观测机构 |
| REC # / TYPE / VERS | 接收机相关信息 |
| ANT # / TYPE | 天线相关信息 |
| ANTENNA: DELTA H/E/N | 标志点到天线相位参考中心 |
| SYS / # / OBS TYPES | 卫星以及其观测值类型 |
| SYS / PHASE SHIFT | 载波偏差 |
| INTERVAL | 采样频率 |
| TIME OF FIRST OBS | 第一包观测值的历元 |
| TIME OF LAST OBS | 最后一包观测值的历元 |
| # OF SATELLITES | 总卫星数目 |
| GLONASS SLOT / FRQ # | GLO 频率相关 |
| SIGNAL STRENGTH UNIT | 卫星信号强度单位 |
| END OF HEADER | 结束标识 |
| > 2023 01 01 00 00 0.0000000 0 58 | 历元观测值 |
数据部分介绍:
2023 01 01 00 00 0.0000000 0 58

RINEX 3 格式简介 (gnss.help)
8.1.1.3 星历⽂件

8.1.2 RINEX 4.x版本
RINEX 4.00 主要是为了适应现代化的导航电文信息,需要定义格式来支持所有星座,同时也是为了更加长久地支持存储观测值、导航电文等数据。版本号之所以会增加,是因为RINEX 4.00 导航电文件不再兼容RINEX 3.0X。不过观测值文件仍然兼容RINEX 3.0X,对于观测值文件来说,没有太大的更新,只是一些比较小的改动。
基站存储数据将逐步过渡到RINEX 4.00,不过目前很多基站数据仍然采用RINEX 2.X,或者是正从RINEX 2.X 往RINEX 3.0X进行过渡,最终过渡到RINEX 4.00估计还需要挺长的时间。
8.2 RTCM格式
国际海运事业⽆线技术委员会(Radio Technical Commission for Maritime Services,简称RTCM)于1983年11⽉为全球推⼴差分
GPS业务设⽴了SC-104专⻔委员会,制定各种数据格式标准。
其中版本1和版本2版本较⽼,对多系统⽀持相对较差,此处我们简单介绍以下最新的RTCM版本 10403.3即,3.3版本。
2004年标准第三版引⼊了⼀种针对RTK、多星系的全新电⽂格式,该格式使⽤可变⻓度格式来提⾼效率并增加可发送的电⽂数量,
这对于实时差分⾮常重要,更新的新标准还⼤ 增加了可能的消息类型的数量。RTCM3.x新定义了多种消息类型,可直接适应正在
开发系统,如增加了对⽹络RTK的⽀持,增加了对北⽃系统与伽利略系统的⽀持,以及对现有系统的修改(如新的L2C与L5信号)。
3.x版本⽀持的数据类型


8.3 NMEA格式
NMEA 是 National Marine Electronics Association 的缩写,是美国国家海洋电子协会的简称,现在是 GPS 导航设备统一的 RTCM标准协议。NMEA-0183 协议是目前卫星导航接收机上使用最广泛的协议,大多数常见的卫星导航接收机、卫星导航数据处理软件都遵守或者至少兼容这个协议。
1 $GPGGA,121252.000,3937.3032,N,11611.6046,E,1,05,2.0,45.9,M,-5.7,M,0000*77
2 $GPRMC,121252.000,A,3958.3032,N,11629.6046,E,15.15,359.95,070306,A*54
3 $GPVTG,359.95,T,M,15.15,N,28.0,K,A*04
4 $GPGGA,121253.000,3937.3090,N,11611.6057,E,1,06,1.2,44.6,M,-5.7,M,0000*72
5 $GPGSA,A,3,14,15,05,22,18,26,2.1,1.2,1.7*3D
6 $GPGSV,3,1,10,18,84,067,23,09,67,067,27,22,49,312,28,15,47,231,30*70
7 $GPGSV,3,2,10,21,32,199,23,14,25,272,24,05,21,140,32,26,14,070,20*7E
8 $GPGSV,3,3,10,29,07,074,30,07,163,28*7D
在这些数据中,包含了位置、速度、时间等信息,通过解析这数据,就可以实时获取物体的位置信息,或者实现时间同步。
- GGA - 全球定位系统定位数据,如时间、定位等
- GSA - 参与定位的 GNSS 卫星 ID 号、精度因子等
- GSV - 可见的 GNSS 卫星,例如可见的卫星数、卫星 ID 号等
- RMC - 推荐的最小具体 GNSS 数据
- VTG - 矢量跟踪与对地速度
通用语句还需要加上所使用的定位系统前缀,GPS NMEA 语句的前缀为“GP”,BeiDou NMEA 语句的前缀为“GB”,GLONASS NMEA 语句的前缀为“GL”,Galileo NMEA 语句的前缀为“GA”,混合定位 NMEA 语句的前缀为“GN”。所以对于现在的接收机,几乎所有的都使用多卫星系统进行定位,多一般开头均为 “GN”。
示例
- GGA(Global Positioning System Fix Data)GPS定位信息
$GPGGA,<1>,<2>,<3>,<4>,<5>,<6>,<7>,<8>,<9>,M,<10>,M,<11>,<12>*hh
- <1> UTC时间,hhmmss(时分秒)格式,和北京时间差8个小时。
- <2> 纬度ddmm.mmmm(度分)格式(前面的0也将被传输)
- <3> 纬度半球N(北半球)或S(南半球)
- <4> 经度dddmm.mmmm(度分)格式(前面的0也将被传输)
- <5> 经度半球E(东经)或W(西经)
- <6> GPS状态:0=未定位,1=单点定位,2=SBAS差分定位,4=RTK固定解,5=RTK浮点解,6=惯导定位
- <7> 正在使用解算位置的卫星数量(00~12)(前面的0也将被传输)
- <8> HDOP水平精度因子(0.5~99.9)
- <9> 海拔高度(-9999.9~99999.9)
- <10> 地球椭球面相对大地水准面的高度
- <11> 差分时间(从最近一次接收到差分信号开始的秒数,如果不是差分定位将为空)
- <12> 差分站ID号0000~1023(前面的0也将被传输,如果不是差分定位将为空)