【电机控制】FOC算法验证步骤——电流环PI参数、速度环PI参数
文章目录
- 前言
- 一、电流环PI
- 1.TI手册
- 二、速度环PI
- 1.TI手册——根据稳定性和带宽计算速度环PI参数
- 2.TI手册——根据稳定性和带宽计算速度环PI参数
- 三、参考文献
- 总结
前言
【电机控制】直流有刷电机、无刷电机汇总——持续更新
使用工具:
1.直流稳压电源:GPS305D(30V/5A)
2.上位机:VOFA+
3.示波器:PICO2205A
4.电桥LCR:VICIOR4090A
5.电流钳:汉泰CC65
提示:以下是本篇文章正文内容,下面案例可供参考
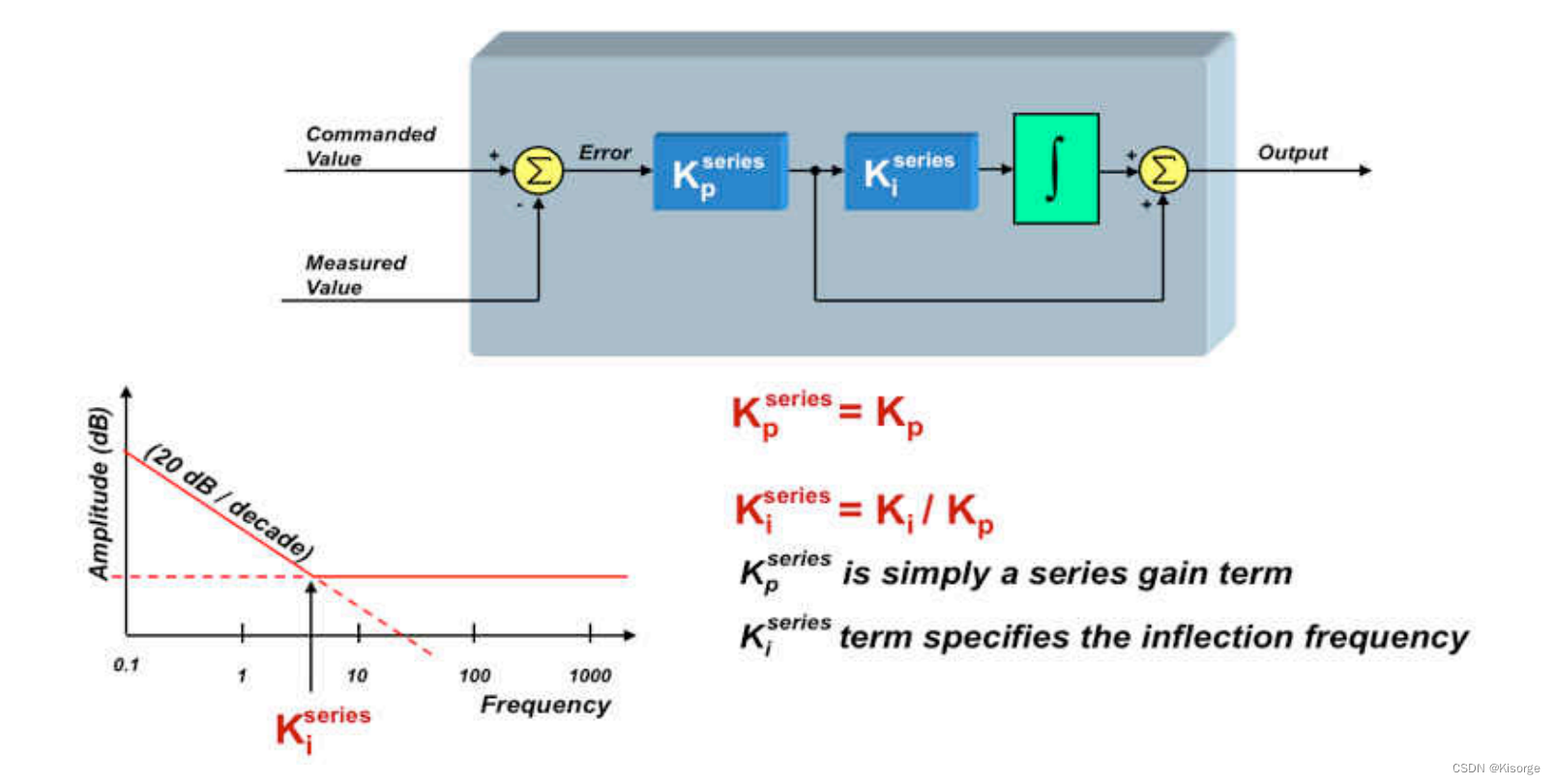
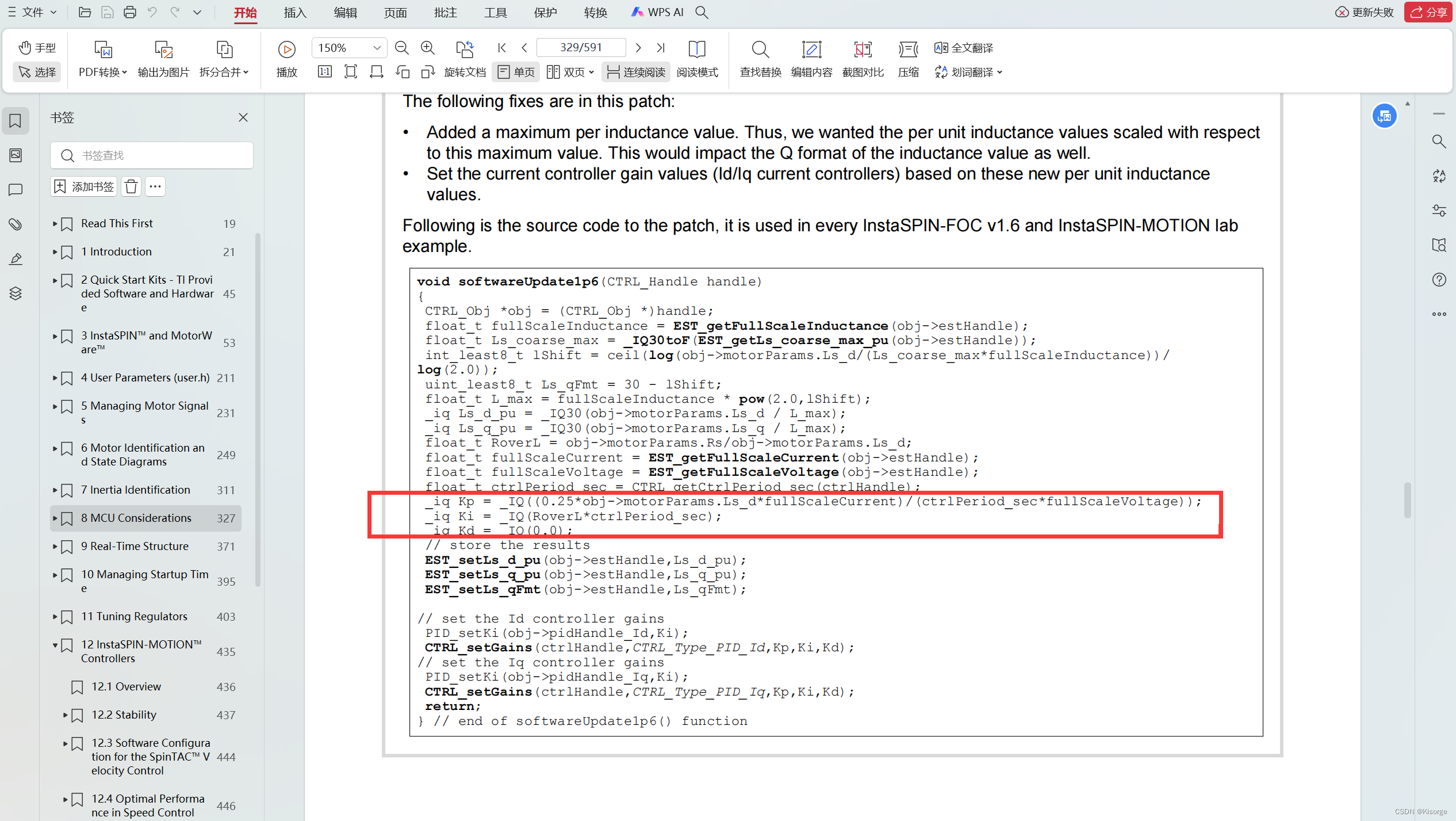
一、电流环PI
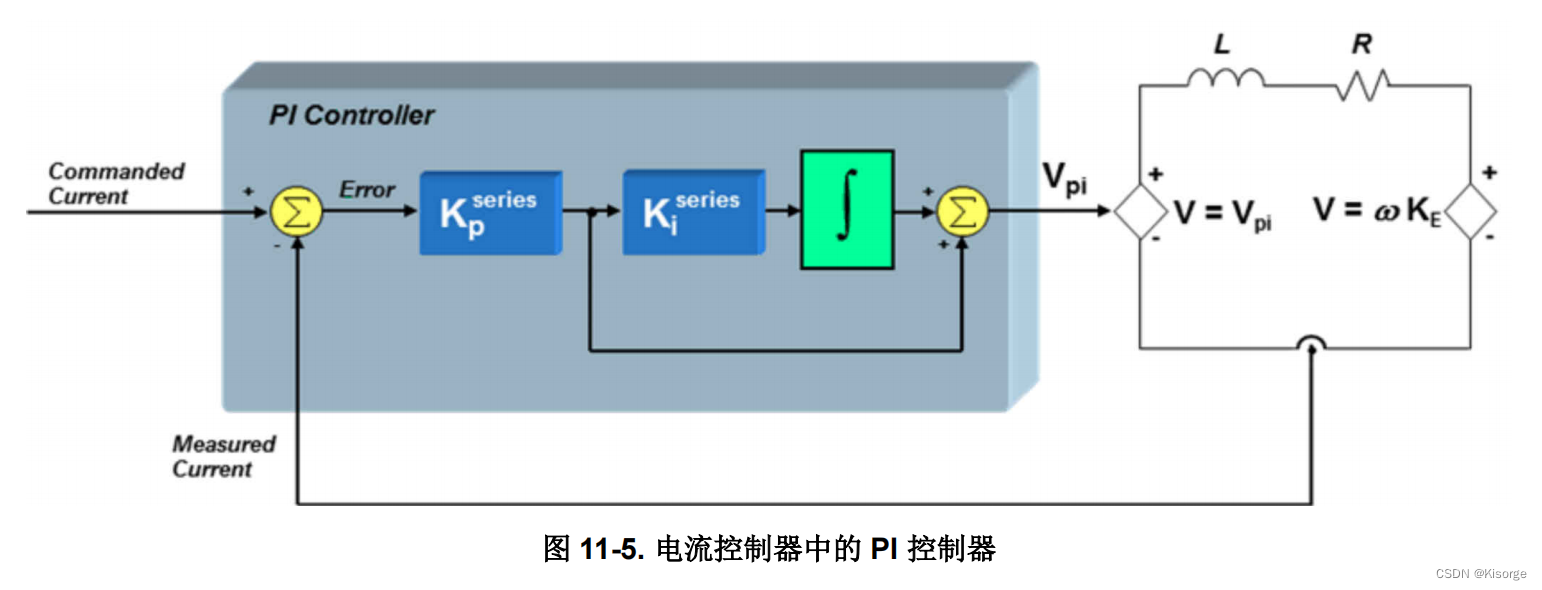
1.TI手册
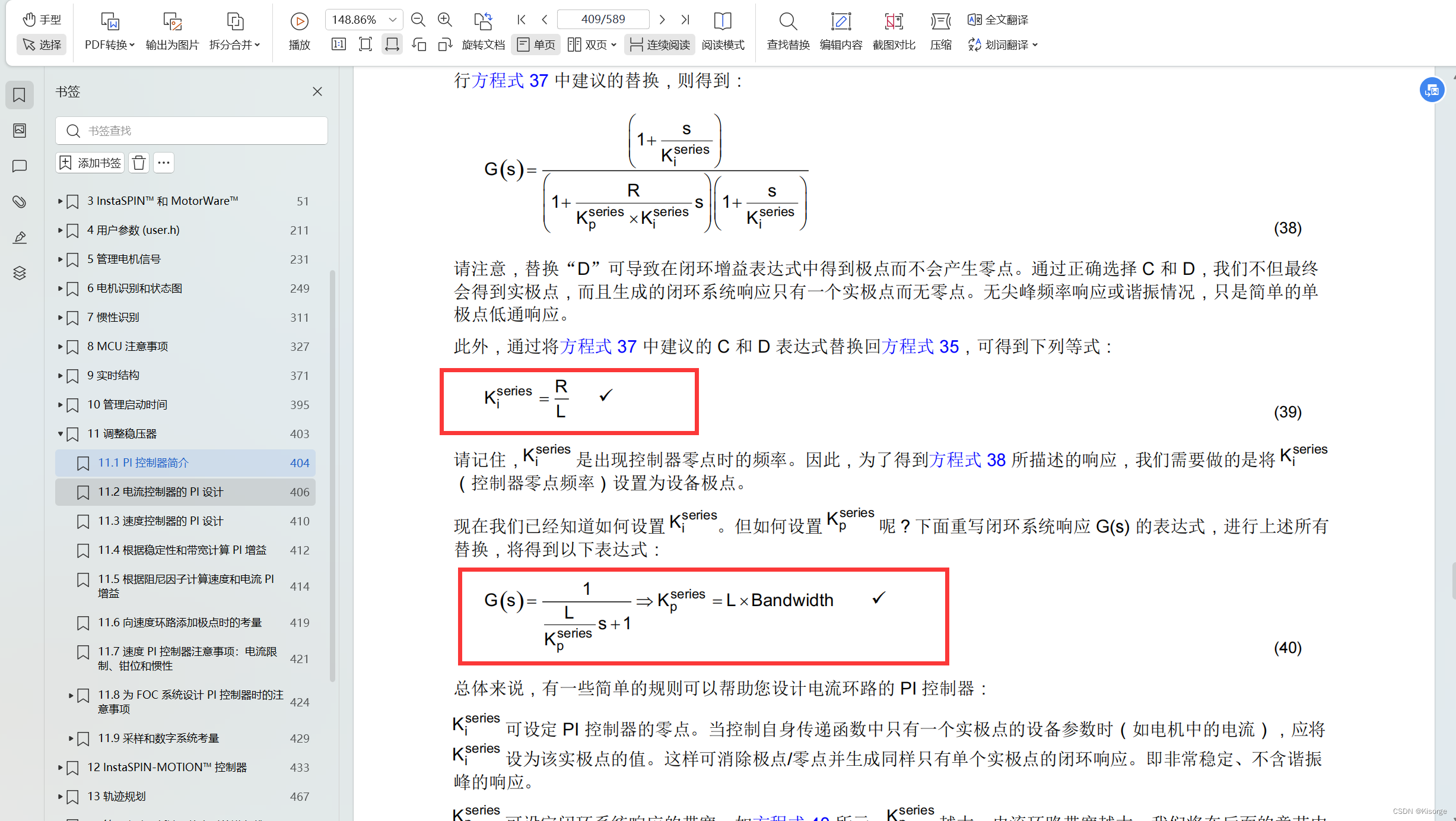
二、速度环PI
1.TI手册——根据稳定性和带宽计算速度环PI参数
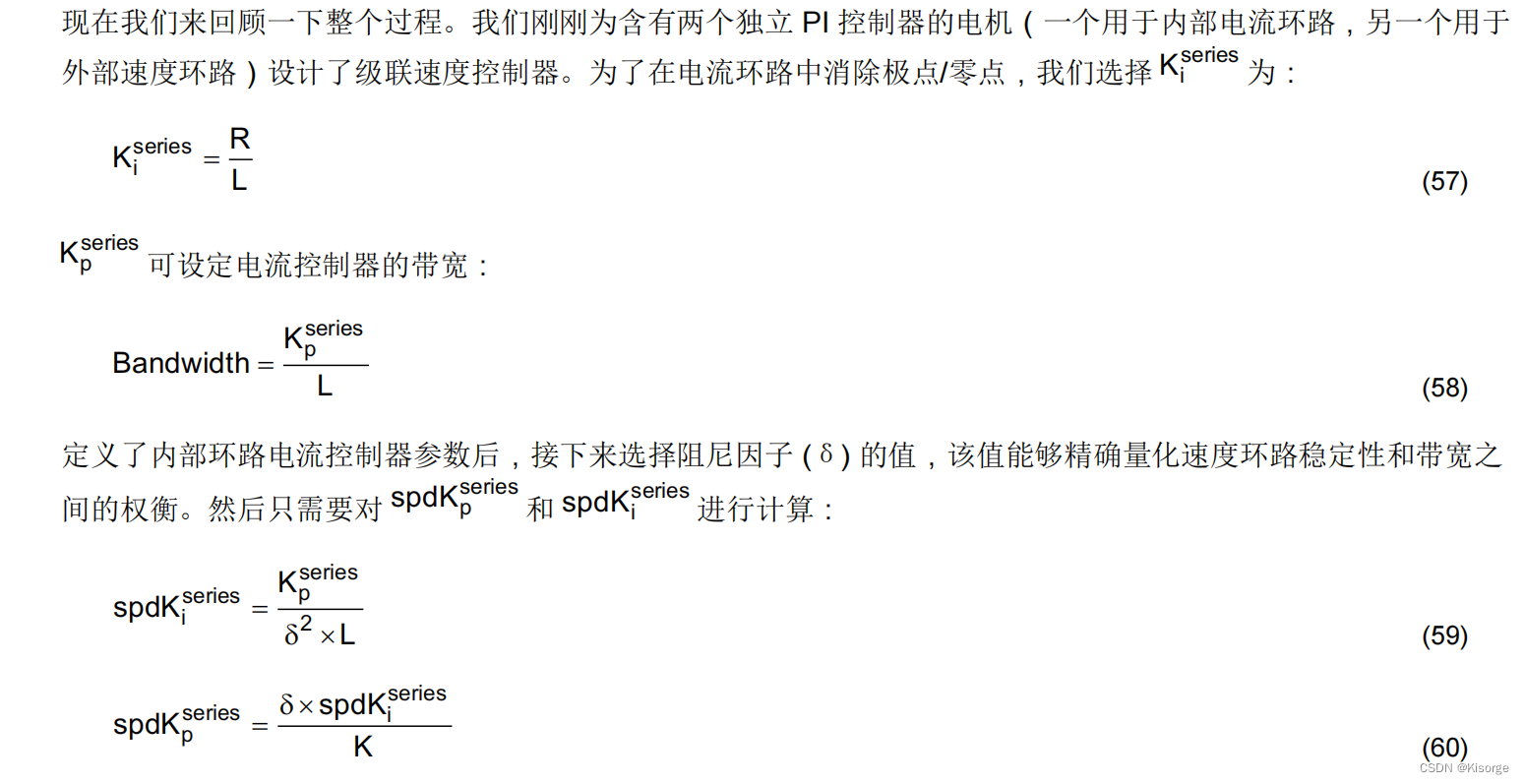
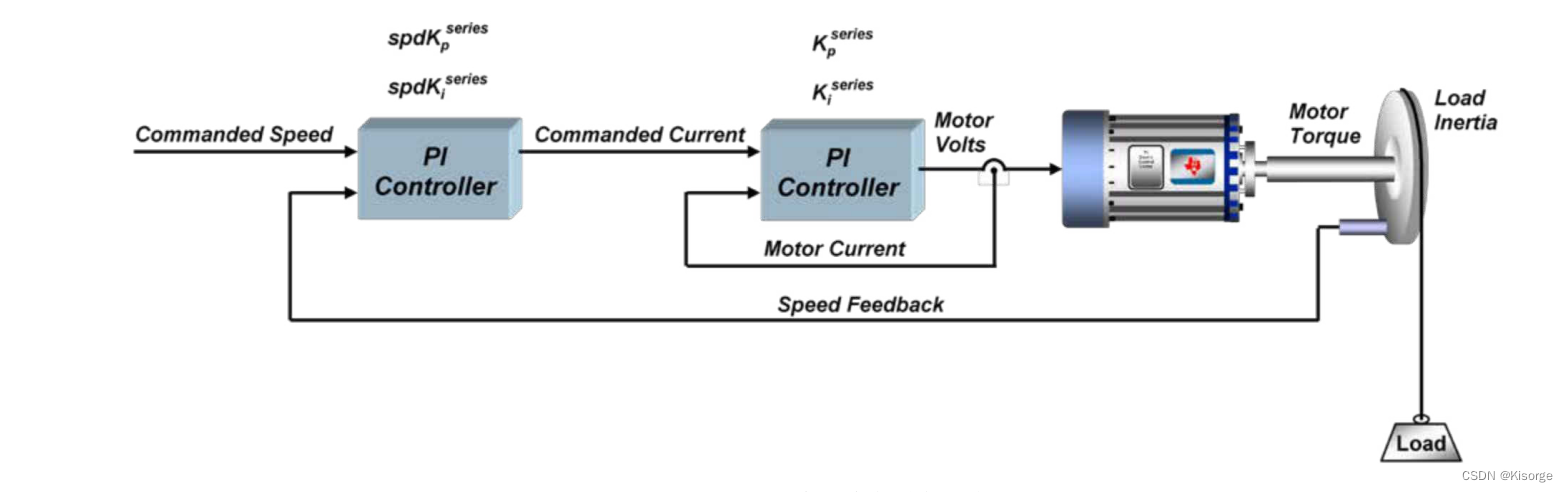
2.TI手册——根据稳定性和带宽计算速度环PI参数
三、参考文献
InstaSPIN-FOC™ 和 InstaSPIN-MOTION™ (Rev. I)
告别经验调参–电流环PI参数自动整定
告别经验调参—速度环PI参数自动整定、
FOC(电机矢量控制)调试记录
FOC电流环PID参数自整定方法(TI)
永磁同步电机(PMSM)磁场定向控制(FOC)电流环PI调节器参数整定
TMS320F28335使用IQmath库
总结
本文仅仅简单介绍了【电机控制】FOC算法验证步骤——电流环PI参数、速度环PI参数,评论区欢迎讨论。