一.物理层
1.介绍
物理层的主要任务描述为确定与传输媒体的接口的一些特性,即:
①机械特性 指明接口所用接线器的形状和尺寸、引线数目和排列、固定和锁定装置等等。
②电气特性 指明在接口电缆的各条线上出现的电压的范围。
③功能特性 指明某条线上出现的某一电平的电压表示何种意义。
④过程特性 指明对于不同功能的各种可能事件的出现顺序。
数据通信系统的模型:

2.几个术语
数据 (data)—— 运送消息的实体。
信号 (signal)—— 数据的电气的或电磁的表现。
“ 模拟的” (analogous)—— 代表消息的参数的取值是连续的。
“ 数字的” (digital)—— 代表消息的参数的取值是离散的。数字比特是离散的,模拟信号是连续的
码元 (code)—— 在使用时间域(或简称为时域)的波形表示数字信号时,代表不同离散数值的基本波形。
单向通信(单工通信)——只能有一个方向的通信而没有反方向的交互。
双向交替通信(半双工通信)——通信的双方都可以发送信息,但不能双方同时发送 ( 当然也就不能同时接收 ) 。
双向同时通信(全双工通信)——通信的双方可以同时发送和接收信息。
3.调制
①基带信号(即基本频带信号)——来自信源的信号。像计算机输出的代表各种文字或图像文件的数据信号都属
于基带信号。
基带信号往往包含有较多的低频成分,甚至有直流成分,而许多信道并不能传输这种低频分量或直流分量。因此必须对基带信号进行调制 (modulation) 变成带通信号。
②带通信号——把基带信号经过载波调制后,把信号的频率范围搬移到较高的频段以便在信道中传输更远(即仅在一段频率范围内能够通过信道)。
基带信号往往包含有较多的低频成分,甚至有直流成分,而许多信道并不能传输这种低频分量或直流分量。为了解决这一问题,就必须对基带信号进行调制 (modulation) 。
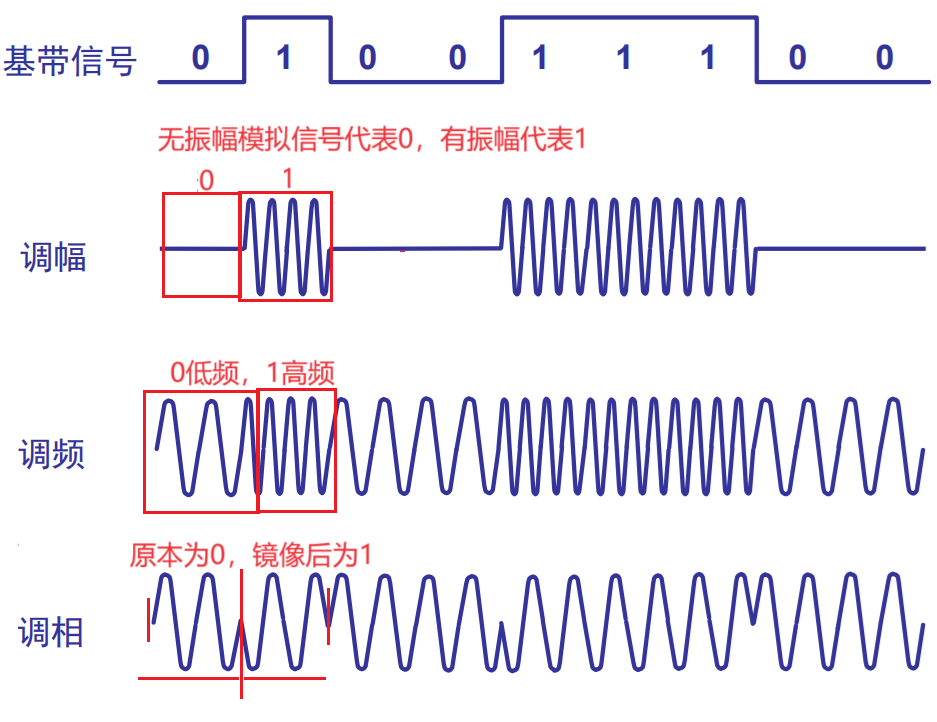
最基本的二元制调制方法有以下几种:
调幅 (AM) :载波的振幅随基带数字信号而变化。
调频 (FM) :载波的频率随基带数字信号而变化。
调相 (PM) :载波的初始相位随基带数字信号而变化。
4.正交振幅调制 QAM (Quadrature Amplitude Modulation)
(1)先介绍码元:
4bit为一组,把0000~1111这2^4=16种分别用不同波形表示,每个波形叫一个16进制码元(因为有16种情况)
一个16进制码元=4bit(log2 16=4),12bit=3个16进制码元,12bit=4个8进制码元(log2 8=3,12÷3=4,1个8进制码元是3bit,000~111 有8个8进制码元)

(2)信道的极限容量
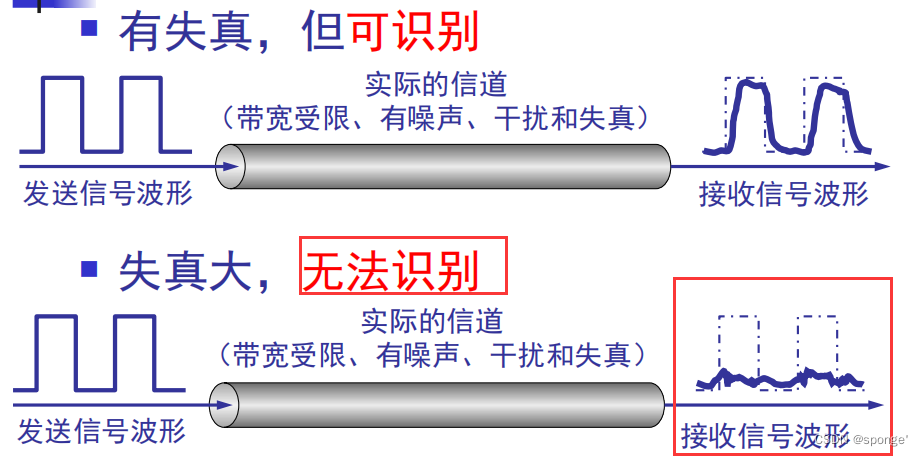
任何实际的信道都不是理想的,在传输信号时会产生各种失真以及带来多种干扰。
码元传输的速率(波特率)越高,或信号传输的距离越远,在信道的输出端的波形的失真就越严重。
波特率解释:
设一个码元=2bit,10bit/s=5波特(波特是码元传输速率单位)bit/s是比特率;比特率对应信息传输速度;波特率对应物理上的波频率的传输速度,波特率高则波的密集程度更高。
二.奈氏准则与香农公式
必考:必考:必考:必考:必考:必考:必考:必考:必考:必考:
1.奈氏准则(不考虑噪声只考虑码间串扰)
1924 年,奈奎斯特 (Nyquist) 就推导出了著名的奈氏准则。他给出了在假定的理想条件下,为了避免码间串扰,码元的传输速率的上限值。
①(解释码间串扰:波的频率太密集导致无法分辨波了。)在任何信道中,码元传输的速率是有上限的,否则就会出现码间串扰的问题,使接收端对码元的判决(即识别)成为不可能。
②如果信道的频带越宽,也就是能够通过的信号高频分量越多,那么就可以用更高的速率传送码元而不出现码间串扰。 无噪声情况的公式是:
 背,就是有一个2
背,就是有一个2
N是几进制码元,即N是一个波有多少种状态
2.香农公式(不考虑码间串扰只考虑噪声)
①香农 (Shannon) 用信息论的理论推导出了带宽受限且有高斯白噪声干扰的信道的极限、无差错的信息传输速率。(香农公式
)信道的极限信息传输速率 C 可表达为

S/N为信噪比,无单位,表达噪声的一种方式,S/N越大代表噪声越小;S/N越小代表噪声越大
②
信噪比 (dB)= 10 log10(S/N)

例如: S/N=10,信噪比为 10dB
S/N=1000,信噪比为 30dB
3.例题:
①在无噪声情况下,若某通信链路的带宽为3kHz, 用4个相位,每个相位具有4种振幅的QAM调制技术,则该通信链路的最大数据传输速率是:
A. 12kbps B.24 kbps C.48 kbps D.96 kbps
A. 12kbps B.24 kbps C.48 kbps D.96 kbps
解:无噪声是用奈氏准则:
R
max =
2
W
log
2 N,Rmax =2×3k log2 (4×4)=2×3k×4=24k,选B。
②在
信噪比为 30dB时,若某通信链路的带宽为3kHz, 用4个相位,每个相位具有4种振幅的QAM调制技术,则该通信链路的最大数据传输速率是:
A. 12kbps B.24 kbps C.48 kbps D.96 kbps
A. 12kbps B.24 kbps C.48 kbps D.96 kbps
解:有噪声用香农公式:30dB=10×log10 S/N,S/N=1000,香农公式
C
=
W
log
2
(1+
S
/
N) b/s,C=3k×log2 (1+1000)b/s≈3k×10=30kbps
不考虑噪声只考虑码间串扰①已知为24kbps,短板效应,最大数据传输速率应为24kbps。
4.信噪比
S/N为信噪比,无单位,表达噪声的一种方式,S/N越大代表噪声越小;S/N越小代表噪声越大
(1)信道的带宽或信道中的信噪比越大,则信息的极限传输速率就越高。
① 只要信息传输速率低于信道的极限信息传输速率,就一定可以找到某种办法来实现无差错的传输。)例如最大数据传输速率是24,则一定有某方式使23可行无差错
②(了解)若信道带宽 W 或信噪比 S/N 没有上限(当然实际信道不可能是这样的),则信道的极限信息传输速率 C 也就没有上限。
③(了解) 实际信道上能够达到的信息传输速率要比香农的极限传输速率低不少。
(2)对于频带宽度已确定的信道,如果信噪比不能再提高了,并且码元传输速率也达到了上限值,那么还有办法提高信息的传输速率。这就是用编码的方法让每一个码元携带更多比特的信息量。
三.物理层下面的传输媒体
1.定义
传输媒体:数据传输系统中在发送器和接收器之间的物理通路。
传输媒体分为:导向传输媒体和非导向传输媒体。
导向传输媒体:电磁波被导向沿着固体媒体传播。
非导向传输媒体:在自由空间(非导向传输媒体中)电磁波的传输。
2.导向传输媒体
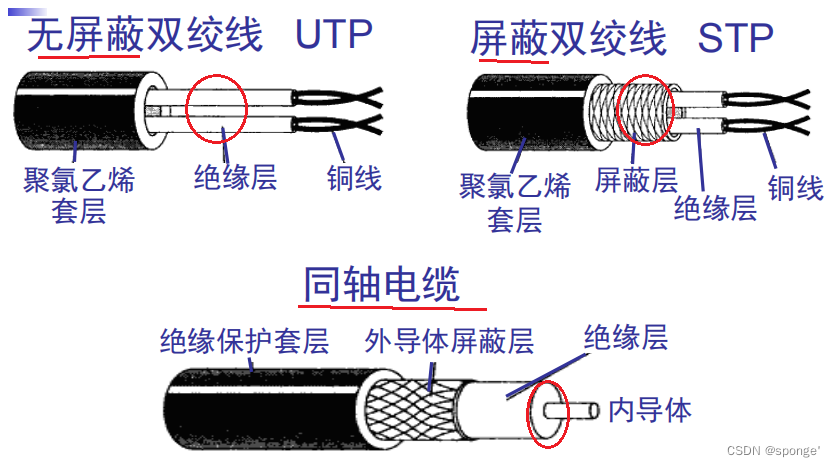
(1)双绞线
①屏蔽双绞线 STP (Shielded Twisted Pair)
②无屏蔽双绞线 UTP (Unshielded Twisted Pair)
(2)同轴电缆
①50 Ω 同轴电缆
②75 Ω 同轴电缆
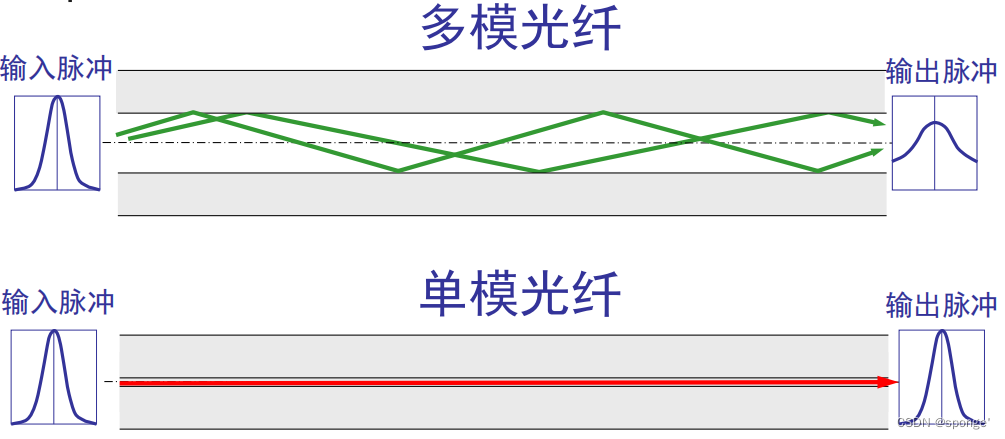
(3)光缆
各种电缆:
3.光纤的工作原理

多模光纤厚,会弹射;单模光纤细,传播基本上直线走。