状态方程ABCD矩阵如何确定
确定状态空间表示中的状态矩阵A、输入矩阵 B、输出矩阵C 和直通矩阵D,需要从系统的动力学方程出发,并将其转换为状态方程的形式。我们可以通过一个具体的物理系统(如倒立摆系统)来说明这一过程
例子:倒立摆系统
系统描述
考虑一个倒立摆系统,其中一个质量 m 被安装在一个长度为 l 的杆的末端。摆的底部固定在一个可移动的推车上。系统的状态变量包括推车的位置 x、推车的速度 ˙x、摆的角度 θ 和摆的角速度 ˙θ。
推导状态方程
为了确定状态矩阵 A、输入矩阵 B、输出矩阵 C 和直通矩阵 D,我们首先写出系统的动力学方程。
1. 动力学方程
根据牛顿第二定律,推车和摆的运动方程为:
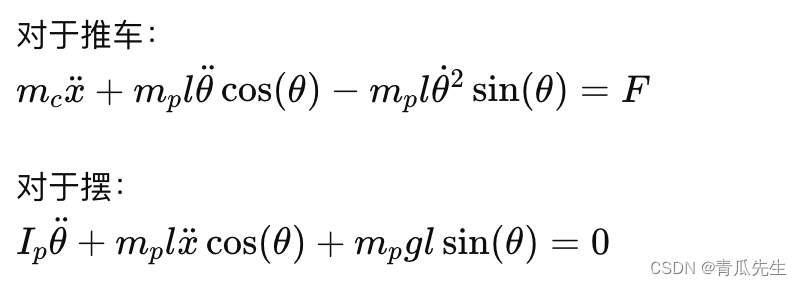
其中:
- m𝑐 是推车质量
- m𝑝 是摆质量
- l 是摆的长度
- I𝑝 是摆的转动惯量
- g 是重力加速度
2. 线性化和状态空间表示
在平衡点 θ=0 附近进行线性化,得到如下方程:

将这些方程写成状态方程的形式ÿ