20240607给Toybrick的TB-RK3588开发板在Buildroot下适配瑞芯微7.86寸QXGATFT-LCD EDP屏幕1536x2048
2024/6/7 13:59
1、背光部分:
&backlight {
pwms = <&pwm2 0 25000 0>;
status = "okay";
};
&pwm2 {
status = "okay";
};
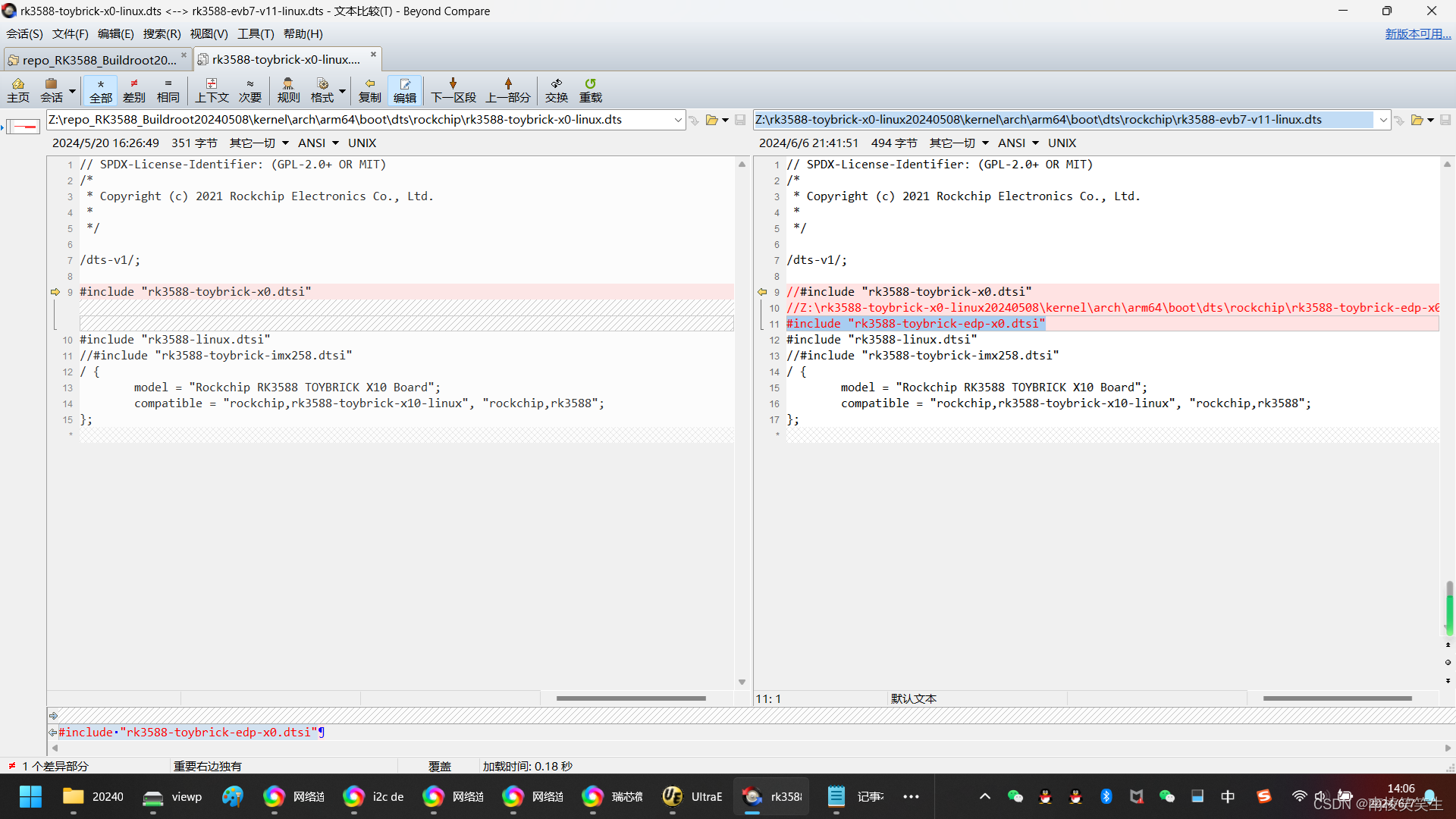
2、DTS部分
Z:\rk3588-toybrick-x0-linux20240508\kernel\arch\arm64\boot\dts\rockchip\rk3588-evb7-v11-linux.dts
Z:\repo_RK3588_Buildroot20240508\kernel\arch\arm64\boot\dts\rockchip\rk3588-toybrick-x0-linux.dts
// SPDX-License-Identifier: (GPL-2.0+ OR MIT)
/*
* Copyright (c) 2021 Rockchip Electronics Co., Ltd.
*
*/
/dts-v1/;
//#include "rk3588-toybrick-x0.dtsi"
//Z:\rk3588-toybrick-x0-linux20240508\kernel\arch\arm64\boot\dts\rockchip\rk3588-toybrick-edp-x0.dtsi
#include "rk3588-toybrick-edp-x0.dtsi"
#include "rk3588-linux.dtsi"
//#include "rk3588-toybrick-imx258.dtsi"
/ {
model = "Rockchip RK3588 TOYBRICK X10 Board";
compatible = "rockchip,rk3588-toybrick-x10-linux", "rockchip,rk3588";
};

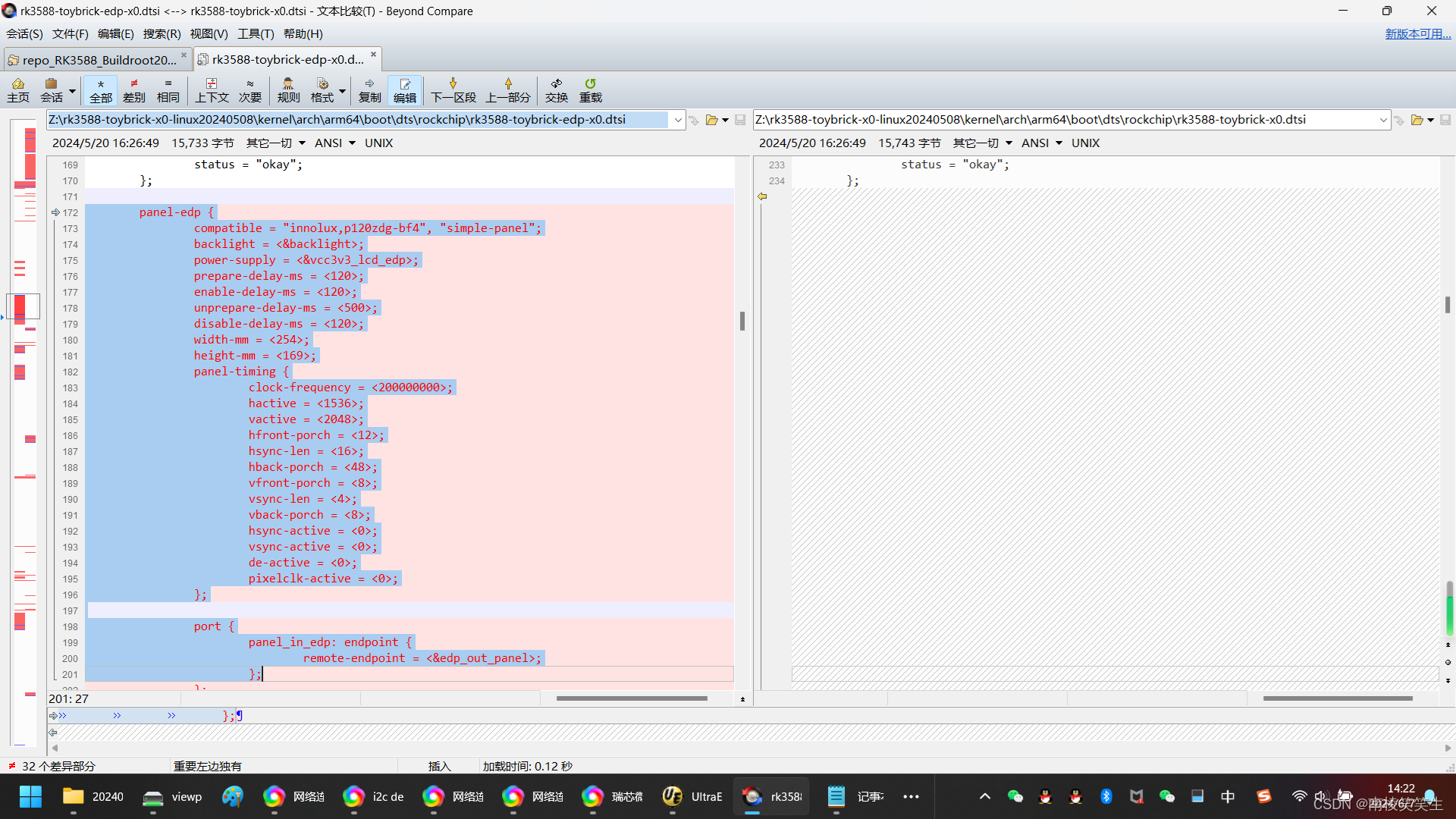
3、EDP的部分和TP部分:
Z:\rk3588-toybrick-x0-linux20240508\kernel\arch\arm64\boot\dts\rockchip\rk3588-toybrick-x0.dtsi
Z:\rk3588-toybrick-x0-linux20240508\kernel\arch\arm64\boot\dts\rockchip\rk3588-toybrick-edp-x0.dtsi
// SPDX-License-Identifier: (GPL-2.0+ OR MIT)
/*
* Copyright (c) 2021 Rockchip Electronics Co., Ltd.
*
*/
#include "dt-bindings/usb/pd.h"
#include "rk3588.dtsi"
#include "rk3588-toybrick.dtsi"
#include "rk3588-rk806-single.dtsi"
/ {
es8388_sound: es8388-sound {
status = "okay";
compatible = "simple-audio-card";
simple-audio-card,format = "i2s";
simple-audio-card,mclk-fs = <256>;
simple-audio-card,name = "rockchip,es8388-codec";
simple-audio-card,dai-link@0 {
format = "i2s";
cpu {
sound-dai = <&i2s0_8ch>;
};
codec {
sound-dai = <&es8388>;
};
};
};
pcie20_avdd0v85: pcie20-avdd0v85 {
compatible = "regulator-fixed";
regulator-name = "pcie20_avdd0v85";
regulator-boot-on;
regulator-min-microvolt = <850000>;
regulator-max-microvolt = <850000>;
vin-supply = <&vdd_0v85_s0>;//csq
};
pcie20_avdd1v8: pcie20-avdd1v8 {
compatible = "regulator-fixed";
regulator-name = "pcie20_avdd1v8";
regulator-boot-on;
regulator-min-microvolt = <1800000>;
regulator-max-microvolt = <1800000>;
vin-supply = <&avcc_1v8_s0>;
};
pcie30_avdd0v75: pcie30-avdd0v75 {
compatible = "regulator-fixed";
regulator-name = "pcie30_avdd0v75";
regulator-boot-on;
regulator-min-microvolt = <750000>;
regulator-max-microvolt = <750000>;
vin-supply = <&avdd_0v75_s0>;
};
pcie30_avdd1v8: pcie30-avdd1v8 {
compatible = "regulator-fixed";
regulator-name = "pcie30_avdd1v8";
regulator-boot-on;
regulator-min-microvolt = <1800000>;
regulator-max-microvolt = <1800000>;
vin-supply = <&avcc_1v8_s0>;
};
rk_headset: rk-headset {
status = "okay";
compatible = "rockchip_headset";
headset_gpio = <&gpio1 RK_PD5 GPIO_ACTIVE_LOW>;
pinctrl-names = "default";
pinctrl-0 = <&hp_det>;
io-channels = <&saradc 3>;
};
vbus5v0_typec: vbus5v0-typec {
compatible = "regulator-fixed";
regulator-name = "vbus5v0_typec";
regulator-min-microvolt = <5000000>;
regulator-max-microvolt = <5000000>;
enable-active-high;
gpio = <&gpio4 RK_PD0 GPIO_ACTIVE_HIGH>;
vin-supply = <&vcc5v0_usb>;
pinctrl-names = "default";
pinctrl-0 = <&typec5v_pwren>;
};
vcc3v3_lcd_n: vcc3v3-lcd0-n {
compatible = "regulator-fixed";
regulator-name = "vcc3v3_lcd0_n";
regulator-boot-on;
enable-active-high;
gpio = <&gpio1 RK_PC4 GPIO_ACTIVE_HIGH>;
vin-supply = <&vcc_1v8_s0>;
};
vcc3v3_pcie30: vcc3v3-pcie30 {
compatible = "regulator-fixed";
regulator-name = "vcc3v3_pcie30";
regulator-min-microvolt = <3300000>;
regulator-max-microvolt = <3300000>;
enable-active-high;
gpios = <&gpio3 RK_PC3 GPIO_ACTIVE_HIGH>;
startup-delay-us = <5000>;
vin-supply = <&vcc12v_dcin>;
};
vcc5v0_host: vcc5v0-host {
compatible = "regulator-fixed";
regulator-name = "vcc5v0_host";
regulator-boot-on;
regulator-always-on;
regulator-min-microvolt = <5000000>;
regulator-max-microvolt = <5000000>;
enable-active-high;
gpio = <&gpio4 RK_PB0 GPIO_ACTIVE_HIGH>;
vin-supply = <&vcc5v0_usb>;
pinctrl-names = "default";
pinctrl-0 = <&vcc5v0_host_en>;
};
vcc_mipicsi0: vcc-mipicsi0-regulator {
compatible = "regulator-fixed";
gpio = <&gpio1 RK_PB1 GPIO_ACTIVE_HIGH>;
pinctrl-names = "default";
pinctrl-0 = <&mipicsi0_pwr>;
regulator-name = "vcc_mipicsi0";
enable-active-high;
};
vcc_mipicsi1: vcc-mipicsi1-regulator {
compatible = "regulator-fixed";
gpio = <&gpio1 RK_PB2 GPIO_ACTIVE_HIGH>;
pinctrl-names = "default";
pinctrl-0 = <&mipicsi1_pwr>;
regulator-name = "vcc_mipicsi1";
enable-active-high;
};
vcc_mipidcphy0: vcc-mipidcphy0-regulator {
compatible = "regulator-fixed";
gpio = <&gpio2 RK_PC4 GPIO_ACTIVE_HIGH>;
pinctrl-names = "default";
pinctrl-0 = <&mipidcphy0_pwr>;
regulator-name = "vcc_mipicsi1";
enable-active-high;
};
wireless_bluetooth: wireless-bluetooth {
compatible = "bluetooth-platdata";
clocks = <&hym8563>;
clock-names = "ext_clock";
uart_rts_gpios = <&gpio3 RK_PA4 GPIO_ACTIVE_LOW>;
pinctrl-names = "default", "rts_gpio";
pinctrl-0 = <&uart8m1_rtsn>, <&bt_reset_gpio>, <&bt_wake_gpio>, <&bt_irq_gpio>;
pinctrl-1 = <&uart8_gpios>;
BT,reset_gpio = <&gpio3 RK_PA6 GPIO_ACTIVE_HIGH>;
BT,wake_gpio = <&gpio3 RK_PA1 GPIO_ACTIVE_HIGH>;
BT,wake_host_irq = <&gpio3 RK_PA0 GPIO_ACTIVE_HIGH>;
status = "okay";
};
wireless_wlan: wireless-wlan {
compatible = "wlan-platdata";
wifi_chip_type = "ap6255";
pinctrl-names = "default";
pinctrl-0 = <&wifi_host_wake_irq>, <&wifi_poweren_gpio>;
WIFI,host_wake_irq = <&gpio3 RK_PA7 GPIO_ACTIVE_HIGH>;
WIFI,poweren_gpio = <&gpio3 RK_PB1 GPIO_ACTIVE_HIGH>;
status = "okay";
};
panel-edp {
compatible = "innolux,p120zdg-bf4", "simple-panel";
backlight = <&backlight>;
power-supply = <&vcc3v3_lcd_edp>;
prepare-delay-ms = <120>;
enable-delay-ms = <120>;
unprepare-delay-ms = <500>;
disable-delay-ms = <120>;
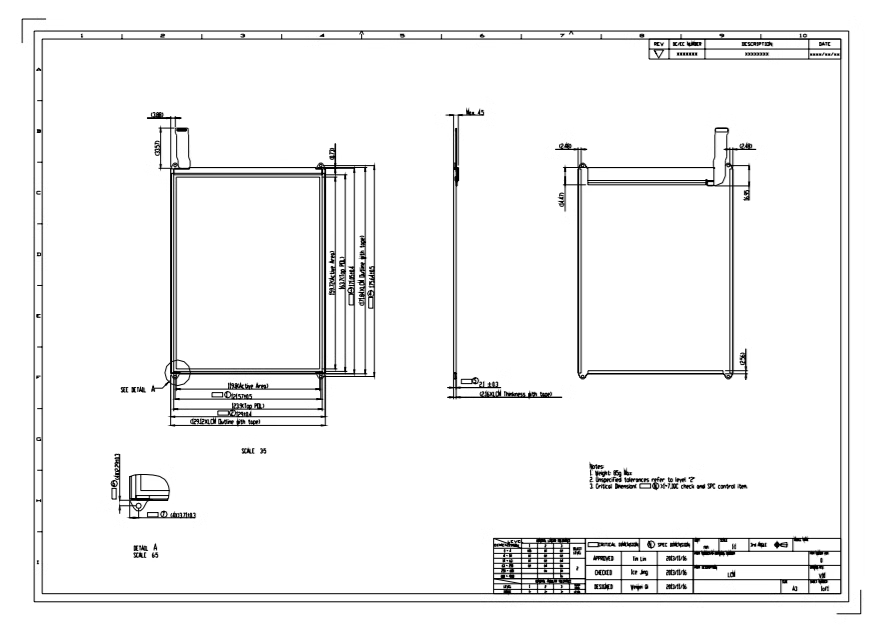
width-mm = <254>;
height-mm = <169>;
panel-timing {
clock-frequency = <200000000>;
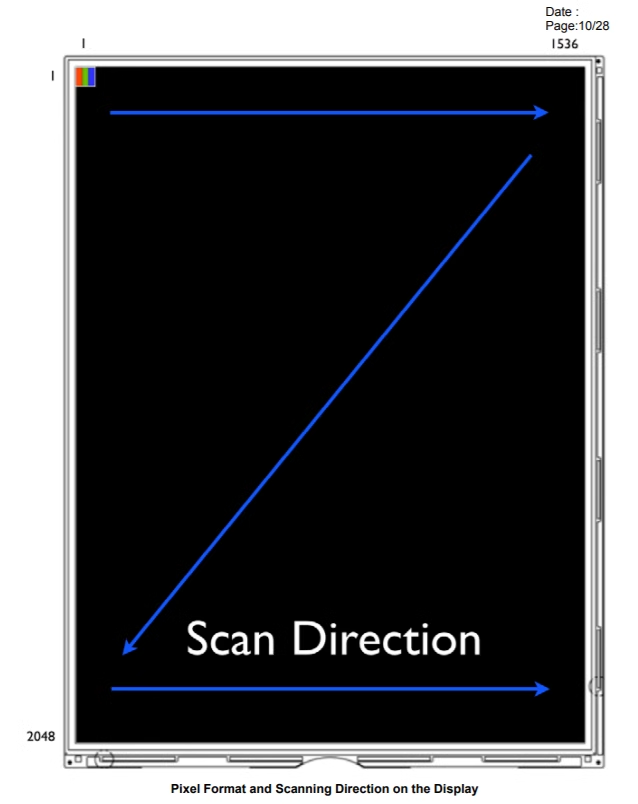
hactive = <1536>;
vactive = <2048>;
hfront-porch = <12>;
hsync-len = <16>;
hback-porch = <48>;
vfront-porch = <8>;
vsync-len = <4>;
vback-porch = <8>;
hsync-active = <0>;
vsync-active = <0>;
de-active = <0>;
pixelclk-active = <0>;
};
port {
panel_in_edp: endpoint {
remote-endpoint = <&edp_out_panel>;
};
};
};
vcc3v3_lcd_edp: vcc3v3-lcd-edp {
compatible = "regulator-fixed";
regulator-name = "vcc3v3_lcd_edp";
gpio = <&gpio1 RK_PA5 GPIO_ACTIVE_HIGH>;
enable-active-high;
vin-supply = <&vcc_3v3_s3>;
};
};
&dsi0_in_vp2 {
status = "disabled";
};
&dsi0_in_vp3 {
status = "disabled";
};
&edp1 {
force-hpd;
status = "okay";
ports {
port@1 {
reg = <1>;
edp_out_panel: endpoint {
remote-endpoint = <&panel_in_edp>;
};
};
};
};
&edp1_in_vp2 {
status = "okay";
};
&hdptxphy1 {
status = "okay";
};
&dsi0_panel {
power-supply = <&vcc3v3_lcd_n>;
reset-gpios = <&gpio2 RK_PB4 GPIO_ACTIVE_LOW>;
pinctrl-names = "default";
pinctrl-0 = <&lcd_rst_gpio>;
};
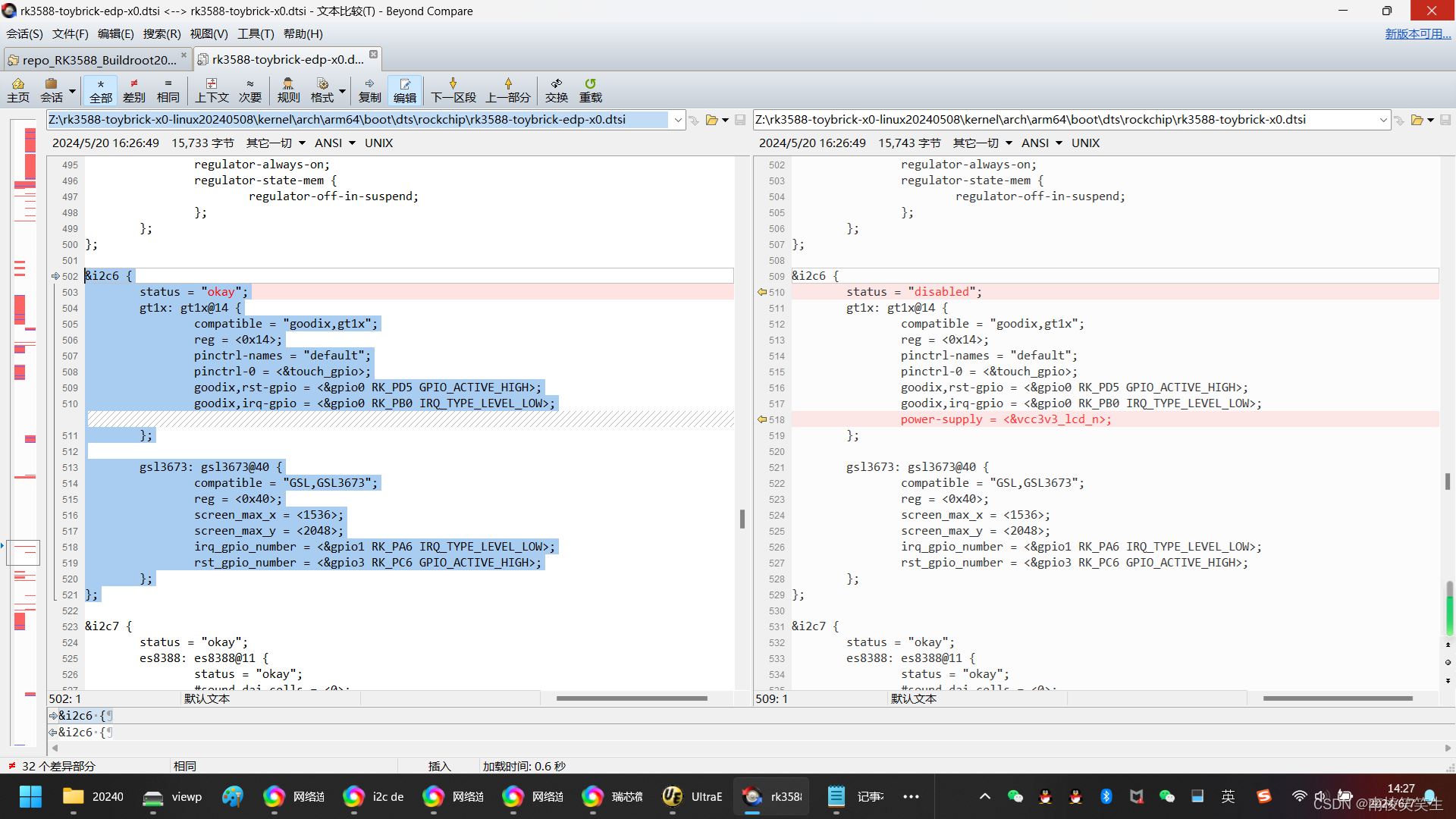
&i2c6 {
status = "okay";
gt1x: gt1x@14 {
compatible = "goodix,gt1x";
reg = <0x14>;
pinctrl-names = "default";
pinctrl-0 = <&touch_gpio>;
goodix,rst-gpio = <&gpio0 RK_PD5 GPIO_ACTIVE_HIGH>;
goodix,irq-gpio = <&gpio0 RK_PB0 IRQ_TYPE_LEVEL_LOW>;
};
gsl3673: gsl3673@40 {
compatible = "GSL,GSL3673";
reg = <0x40>;
screen_max_x = <1536>;
screen_max_y = <2048>;
irq_gpio_number = <&gpio1 RK_PA6 IRQ_TYPE_LEVEL_LOW>;
rst_gpio_number = <&gpio3 RK_PC6 GPIO_ACTIVE_HIGH>;
};
};
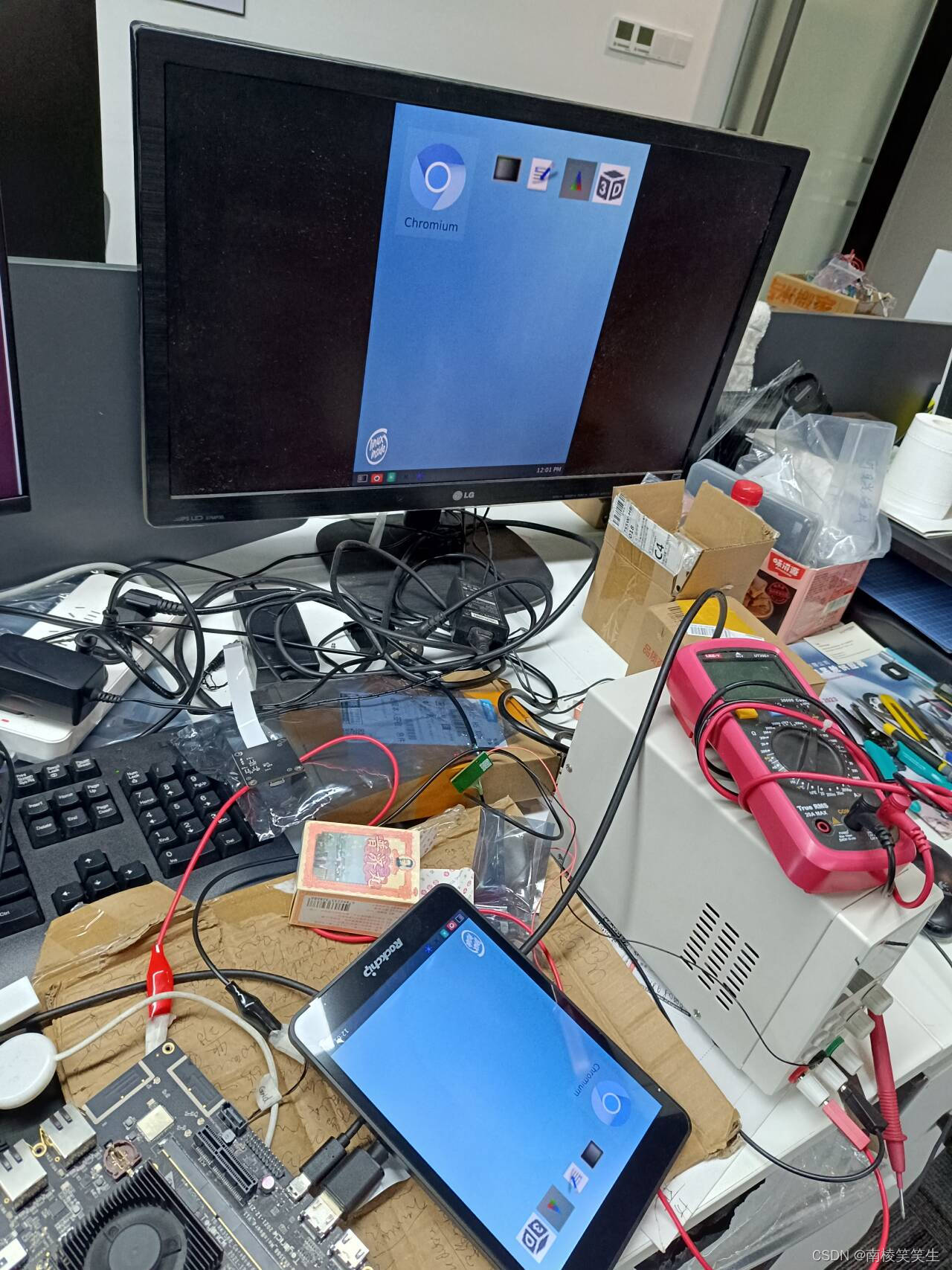
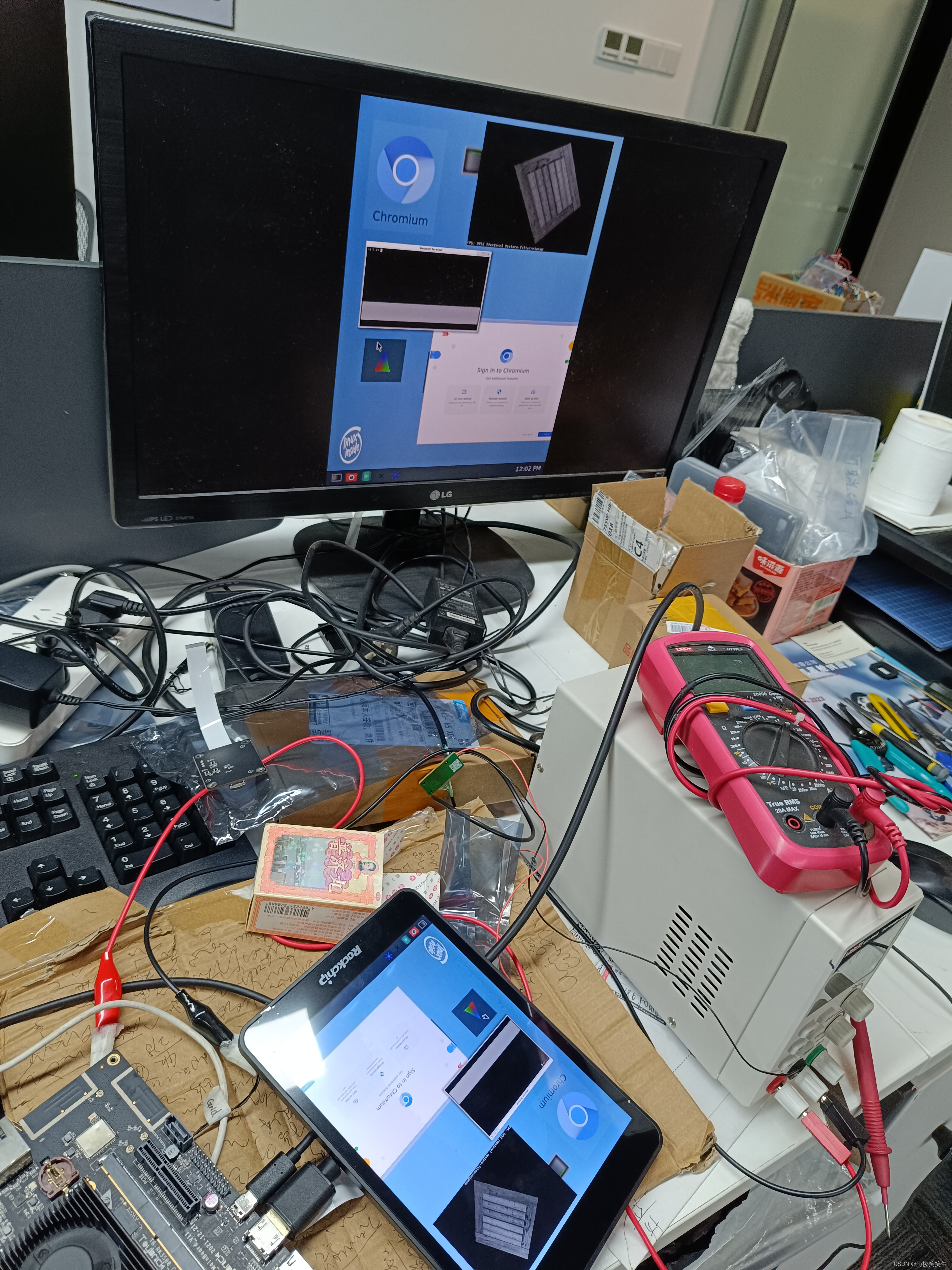
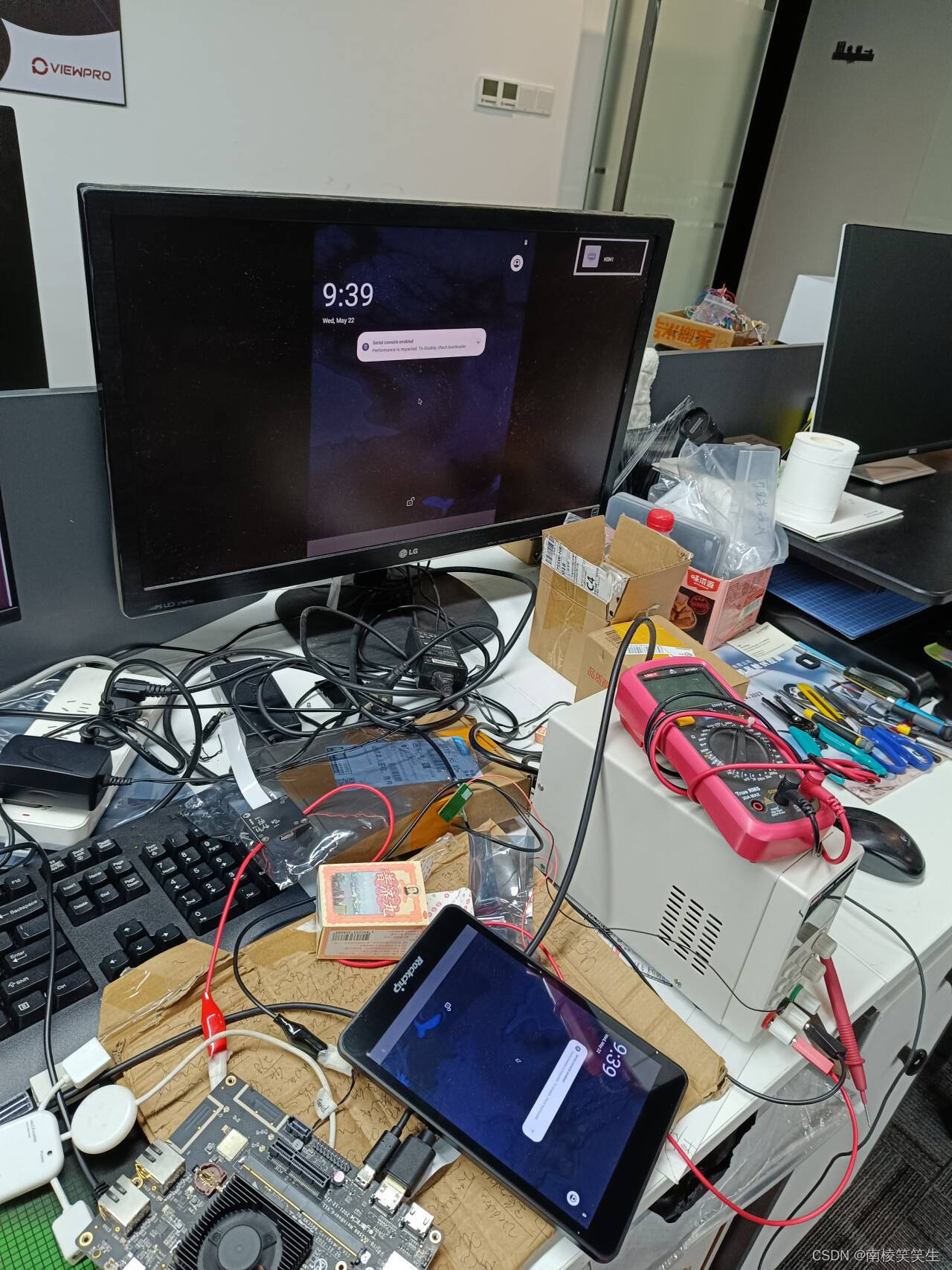
Buildroot下的效果图:(HDMI+EDP双显示:)
4、Toybrick的TB-RK3588开发板在Android12下适配瑞芯微7.86寸QXGATFT-LCD EDP屏幕于此类似:
Y:\android12-rk-outside\kernel-5.10\arch\arm64\boot\dts\rockchip\rk3588-toybrick-x0-android.dts
Y:\repo_toybrick_android12\kernel-5.10\arch\arm64\boot\dts\rockchip\rk3588-toybrick-x0-android.dts
// SPDX-License-Identifier: (GPL-2.0+ OR MIT)
/*
* Copyright (c) 2021 Rockchip Electronics Co., Ltd.
*
*/
/dts-v1/;
//#include "rk3588-toybrick-x0.dtsi"
#include "rk3588-toybrick-edp-x0.dtsi"
#include "rk3588-android.dtsi"
#include "rk3588-toybrick-imx258.dtsi"
/ {
model = "Rockchip RK3588 TOYBRICK LP4 X10 Board";
compatible = "rockchip,rk3588-toybrick-x10-android", "rockchip,rk3588";
};
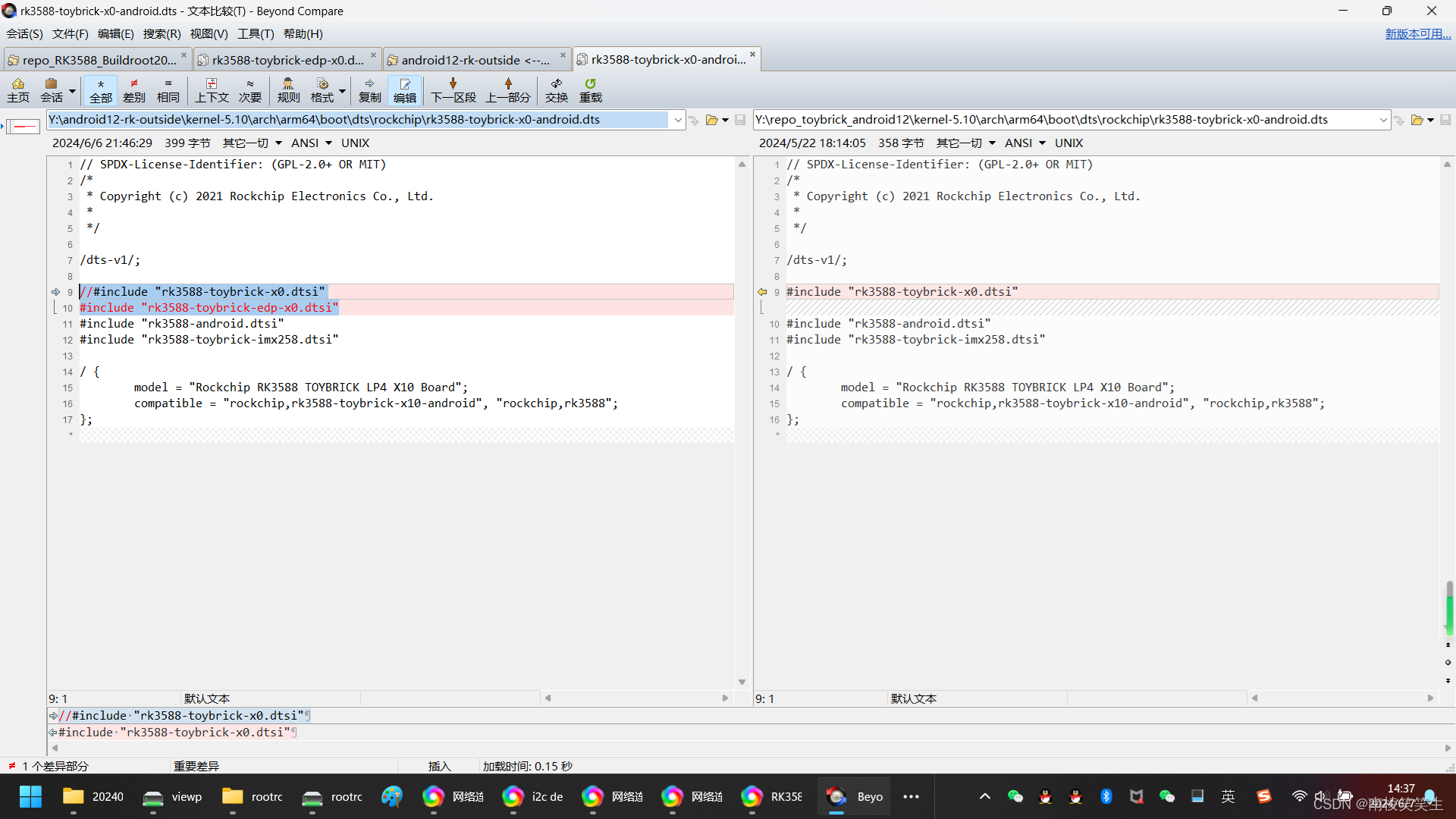
【请参考Buildroot,貌似完全一样的!】
Y:\android12-rk-outside\kernel-5.10\arch\arm64\boot\dts\rockchip\rk3588-toybrick-edp-x0.dtsi
Y:\android12-rk-outside\kernel-5.10\arch\arm64\boot\dts\rockchip\rk3588-toybrick-x0.dtsi
Android12下的效果图:(HDMI+EDP双显示:)

参考资料:
https://blog.csdn.net/RYF6666/article/details/134603713
RK3588调试EDP
https://item.taobao.com/item.htm?_u=7ju3ku5a4e&id=655311470417&spm=a1z09.2.0.0.2ede2e8deLzeFJ
瑞芯微7.86寸QXGATFT-LCD EDP屏幕1536x2048适配3568x开发板


https://t.rock-chips.com/wiki/CN/tb-rk3588x/01%E5%BF%AB%E9%80%9F%E4%B8%8A%E6%89%8B.html
开发板概况?
TB-RK3588X采用瑞芯微最新旗舰SOC芯片RK3588。RK3588是一款采用ARM架构的通用型SoC,集成了四核Cortex-A76和四核Cortex-A55 CPU,G610 MP4 GPU,以及6 TOPs算力的NPU。
https://t.rock-chips.com/wiki.php?filename=%E6%9D%BF%E7%BA%A7%E6%8C%87%E5%8D%97/TB-RK3588X
一、产品简介
TB-RK3588X采用瑞芯微最新旗舰SOC芯片RK3588。RK3588是一款采用ARM架构的通用型SoC,集成了四核Cortex-A76和四核Cortex-A55 CPU,G610 MP4 GPU,以及6 TOPs算力的NPU。内置多种功能强大的嵌入式硬件引擎,支持8K@60fps的H.265 和VP9解码器、8K@30fps的H.264 解码器和4K@60fps的AV1解码器;支持8K@30fps 的H.264和H.265编码器,高质量的JPEG编码器/解码器,专门的图像预处理器和后处理器。RK3588还引入了新一代完全基于硬件的最大4800万像素ISP(图像信号处理器),实现了许多算法加速器,如HDR、3A、LSC、3DNR、2DNR、锐化、dehaze、鱼眼校正、伽马校正等,在图形后期处理方面拥有广泛应用。RK3588集成了瑞芯微自研的第三代NPU处理器,可支持 INT4/INT8/INT16/FP16 混合运算,其强大的兼容性,可以轻松转换基于TensorFlow / MXNet/PyTorch/Caffe 等一系列框架的网络模型。

![python的line[:-1]和line[-1]](https://img-blog.csdnimg.cn/direct/0cd795e076f745f4b34a63462fbf9da9.png)