文章目录
前言
背景介绍
初始代码
优化代码
分析和应用
总结
前言
见《【研发日记】Matlab/Simulink软件优化(一)——动态内存负荷压缩》
背景介绍
在一个嵌入式软件开发项目中,需要设计一个ECU节点的CAN网路数据发送,需求是在500k的通信波特率上,动态发送10到40帧报文,发送一轮的时间最长不能超过50ms。示例如下:

初始代码
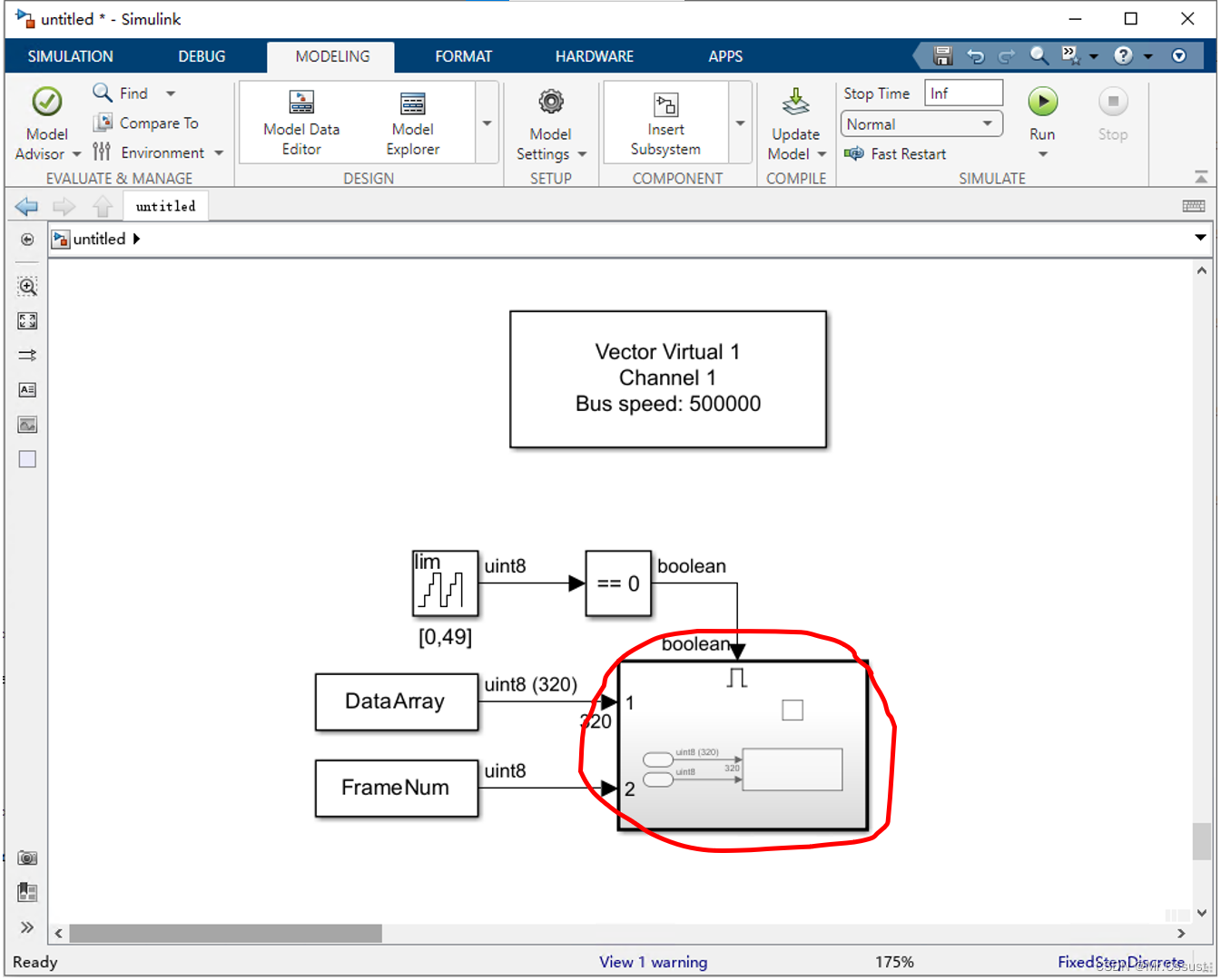
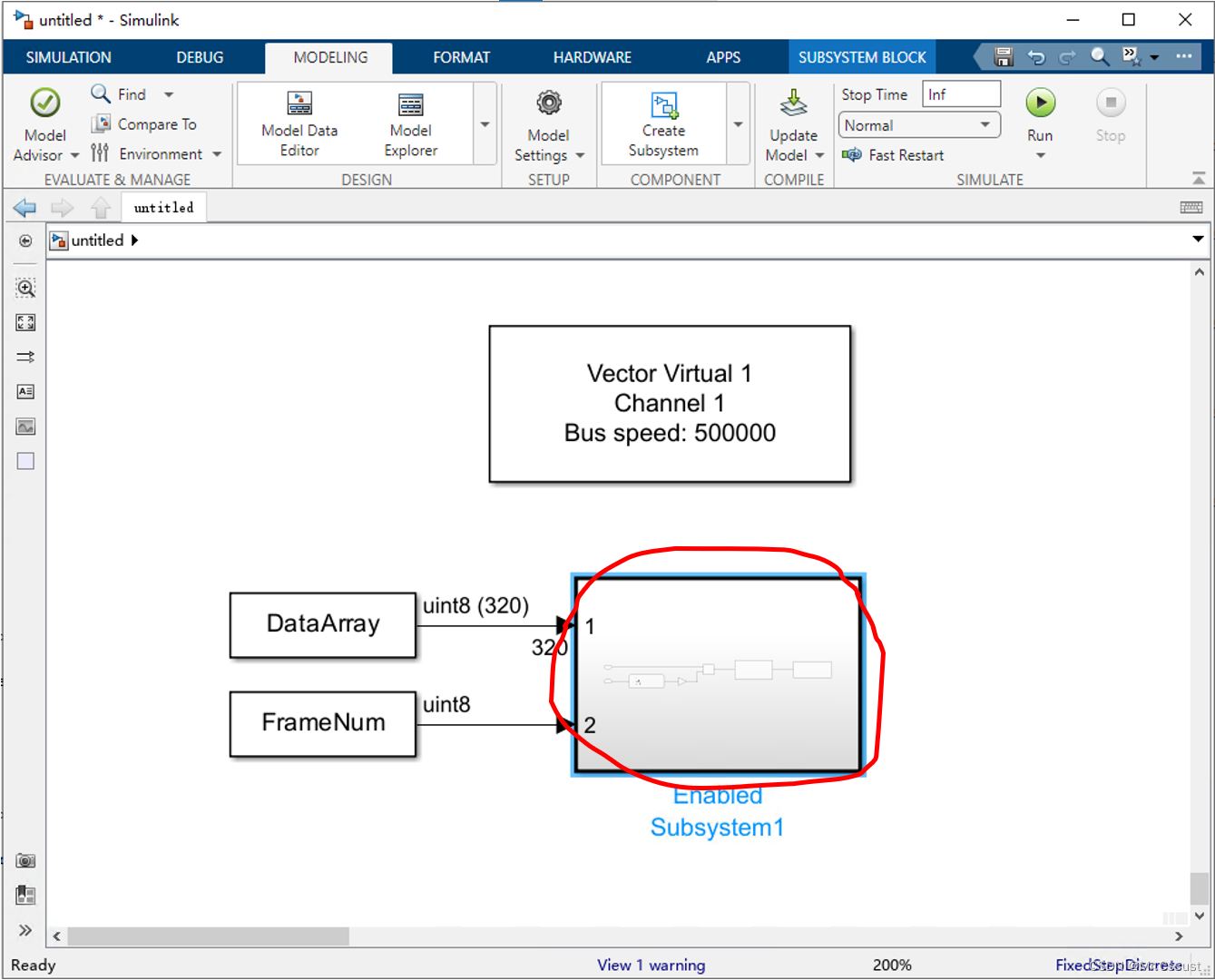
一开始算法开发的思路非常简单,就是设置一个50ms的任务,用for循环把要发送的数据装入CAN发送Buffer。示例如下:

以上模型生成的代码如下:
#include "untitled.h"
#include "untitled_private.h"
/* Block signals (default storage) */
B_untitled_T untitled_B;
/* Block states (default storage) */
DW_untitled_T untitled_DW;
/* Real-time model */
static RT_MODEL_untitled_T untitled_M_;
RT_MODEL_untitled_T *const untitled_M = &untitled_M_;
/* Model step function */
void untitled_step(void)
{
int32_T i;
int32_T rtb_Gain;
int32_T s6_iter;
char_T *sErr;
void *inputMsgRef;
/* Outputs for Enabled SubSystem: '<Root>/Subsystem' incorporates:
* EnablePort: '<S3>/Enable'
*/
/* RelationalOperator: '<S1>/Compare' incorporates:
* Constant: '<S1>/Constant'
* UnitDelay: '<S2>/Output'
*/
if (untitled_DW.Output_DSTATE == 0) {
if (!untitled_DW.Subsystem_MODE) {
/* Enable for Iterator SubSystem: '<S3>/For Iterator Subsystem' */
/* Enable for S-Function (svntcantransmit): '<S6>/CAN Transmit' */
sErr = GetErrorBuffer(&untitled_DW.CANTransmit_CANTransmit[0U]);
LibReset(&untitled_DW.CANTransmit_CANTransmit[0U]);
LibStart(&untitled_DW.CANTransmit_CANTransmit[0U]);
if (*sErr != 0) {
rtmSetErrorStatus(untitled_M, sErr);
rtmSetStopRequested(untitled_M, 1);
}
/* End of Enable for S-Function (svntcantransmit): '<S6>/CAN Transmit' */
/* End of Enable for SubSystem: '<S3>/For Iterator Subsystem' */
untitled_DW.Subsystem_MODE = true;
}
/* Outputs for Iterator SubSystem: '<S3>/For Iterator Subsystem' incorporates:
* ForIterator: '<S6>/For Iterator'
*/
for (s6_iter = 0; s6_iter < 40; s6_iter++) {
/* Gain: '<S6>/Gain' */
rtb_Gain = s6_iter << 3;
for (i = 0; i < 8; i++) {
/* Selector: '<S6>/Selector' incorporates:
* Constant: '<Root>/Constant'
*/
untitled_B.Selector[i] = untitled_ConstP.Constant_Value[i + rtb_Gain];
}
/* S-Function (scanpack): '<S6>/CAN Pack' */
/* S-Function (scanpack): '<S6>/CAN Pack' */
untitled_B.CANPack.ID = 10U;
untitled_B.CANPack.Length = 8U;
untitled_B.CANPack.Extended = 0U;
untitled_B.CANPack.Remote = 0;
untitled_B.CANPack.Data[0] = 0;
untitled_B.CANPack.Data[1] = 0;
untitled_B.CANPack.Data[2] = 0;
untitled_B.CANPack.Data[3] = 0;
untitled_B.CANPack.Data[4] = 0;
untitled_B.CANPack.Data[5] = 0;
untitled_B.CANPack.Data[6] = 0;
untitled_B.CANPack.Data[7] = 0;
{
(void) memcpy((untitled_B.CANPack.Data), &untitled_B.Selector[0],
8 * sizeof(uint8_T));
}
/* S-Function (svntcantransmit): '<S6>/CAN Transmit' */
sErr = GetErrorBuffer(&untitled_DW.CANTransmit_CANTransmit[0U]);
/* S-Function (scanpack): '<S6>/CAN Pack' incorporates:
* S-Function (svntcantransmit): '<S6>/CAN Transmit'
*/
inputMsgRef = &untitled_B.CANPack;
/* S-Function (svntcantransmit): '<S6>/CAN Transmit' */
LibOutputs_CANTransmit(&untitled_DW.CANTransmit_CANTransmit[0U],
inputMsgRef, 1);
if (*sErr != 0) {
rtmSetErrorStatus(untitled_M, sErr);
rtmSetStopRequested(untitled_M, 1);
}
}
/* End of Outputs for SubSystem: '<S3>/For Iterator Subsystem' */
} else {
if (untitled_DW.Subsystem_MODE) {
/* Disable for Iterator SubSystem: '<S3>/For Iterator Subsystem' */
/* Disable for S-Function (svntcantransmit): '<S6>/CAN Transmit' */
sErr = GetErrorBuffer(&untitled_DW.CANTransmit_CANTransmit[0U]);
LibReset(&untitled_DW.CANTransmit_CANTransmit[0U]);
if (*sErr != 0) {
rtmSetErrorStatus(untitled_M, sErr);
rtmSetStopRequested(untitled_M, 1);
}
/* End of Disable for S-Function (svntcantransmit): '<S6>/CAN Transmit' */
/* End of Disable for SubSystem: '<S3>/For Iterator Subsystem' */
untitled_DW.Subsystem_MODE = false;
}
}
/* End of RelationalOperator: '<S1>/Compare' */
/* End of Outputs for SubSystem: '<Root>/Subsystem' */
/* Switch: '<S5>/FixPt Switch' incorporates:
* Constant: '<S4>/FixPt Constant'
* Constant: '<S5>/Constant'
* Sum: '<S4>/FixPt Sum1'
* UnitDelay: '<S2>/Output'
*/
if ((uint8_T)(untitled_DW.Output_DSTATE + 1U) > 49) {
untitled_DW.Output_DSTATE = 0U;
} else {
untitled_DW.Output_DSTATE++;
}
/* End of Switch: '<S5>/FixPt Switch' */
}
/* Model initialize function */
void untitled_initialize(void)
{
{
int32_T bitParams[4];
char_T *sErr;
/* Start for S-Function (svntcantransmit): '<S6>/CAN Transmit' */
sErr = GetErrorBuffer(&untitled_DW.CANTransmit_CANTransmit[0U]);
CreateHostLibrary("slhostlibcantransmit.dll",
&untitled_DW.CANTransmit_CANTransmit[0U]);
if (*sErr == 0) {
bitParams[0U] = 1;
bitParams[1U] = 4;
bitParams[2U] = 3;
bitParams[3U] = 1;
LibCreate_CANTransmit(&untitled_DW.CANTransmit_CANTransmit[0U], "vector",
"slvectorxlwrapper.dll", "Virtual", 0, 1, 1, 1,
"canslconverter", "vectorxlplugin", 500000.0,
&bitParams[0U], 0, 0, 0, 1.0, 0);
}
if (*sErr == 0) {
LibStart(&untitled_DW.CANTransmit_CANTransmit[0U]);
}
if (*sErr != 0) {
rtmSetErrorStatus(untitled_M, sErr);
rtmSetStopRequested(untitled_M, 1);
}
/* End of Start for S-Function (svntcantransmit): '<S6>/CAN Transmit' */
/* End of SystemInitialize for SubSystem: '<S3>/For Iterator Subsystem' */
/* End of SystemInitialize for SubSystem: '<Root>/Subsystem' */
}
}
/* Model terminate function */
void untitled_terminate(void)
{
char_T *sErr;
/* Terminate for Enabled SubSystem: '<Root>/Subsystem' */
/* Terminate for Iterator SubSystem: '<S3>/For Iterator Subsystem' */
/* Terminate for S-Function (svntcantransmit): '<S6>/CAN Transmit' */
sErr = GetErrorBuffer(&untitled_DW.CANTransmit_CANTransmit[0U]);
LibTerminate(&untitled_DW.CANTransmit_CANTransmit[0U]);
if (*sErr != 0) {
rtmSetErrorStatus(untitled_M, sErr);
rtmSetStopRequested(untitled_M, 1);
}
LibDestroy(&untitled_DW.CANTransmit_CANTransmit[0U], 0);
DestroyHostLibrary(&untitled_DW.CANTransmit_CANTransmit[0U]);
/* End of Terminate for S-Function (svntcantransmit): '<S6>/CAN Transmit' */
/* End of Terminate for SubSystem: '<S3>/For Iterator Subsystem' */
/* End of Terminate for SubSystem: '<Root>/Subsystem' */
}按照上述示例生成的代码,调试时监测到CAN网络上的瞬时负载率,在0%和100%之间来回跳变。0%和100%各自占用一段时间,两者的比例随着发送报文数量的多少变化。当报文数为最大的40帧时,100%瞬时负载率会持续10ms左右,如下图所示:
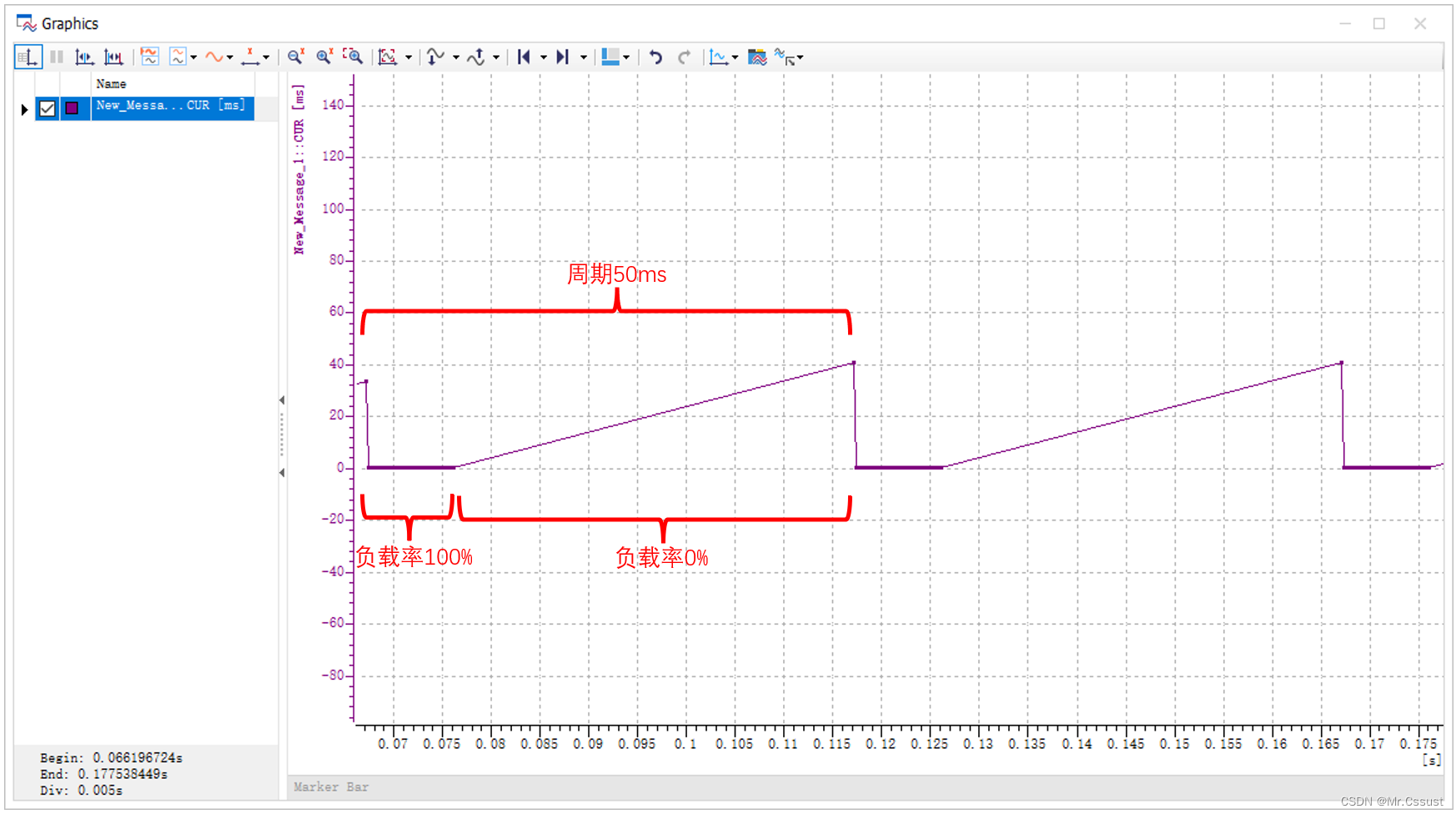
分析上述网络通信的特点,100%瞬时负载率持续的10ms时间段里,肯定会有其他ECU节点也发出报文,这时候CAN网络就会自动根据ID的优先级分配谁先发,谁等待后发,即出现冲突抢占现象。在CAN网络中如果冲突抢占是偶发的,那就不会有太大影响,但是如果冲突抢占是持续的,那就不是我们希望看到的了。
优化代码
根据对上述问题的分析,我们发现每个50ms周期里边都还有至少40ms是没有利用的,那么只要把前面拥挤的报文分散开到后面一部分,就能解决前面的问题了。然后如果还有剩余的时间没有利用,那么我们就柔性地缩短50ms的周期时长,提高数据发送的频率。这样既能解决前面的问题,又能把总线资源充分利用起来,用于提高我们网络通信的性能。示例如下:

以上模型生成的代码如下:
#include "untitled.h"
#include "untitled_private.h"
/* Named constants for Chart: '<S1>/Chart' */
#define untitled_IN_a ((uint8_T)1U)
#define untitled_IN_a1 ((uint8_T)2U)
/* Block signals (default storage) */
B_untitled_T untitled_B;
/* Block states (default storage) */
DW_untitled_T untitled_DW;
/* Real-time model */
static RT_MODEL_untitled_T untitled_M_;
RT_MODEL_untitled_T *const untitled_M = &untitled_M_;
/* Model step function */
void untitled_step(void)
{
real_T rtb_Gain;
int32_T i;
char_T *sErr;
void *inputMsgRef;
/* Chart: '<S1>/Chart' incorporates:
* Constant: '<Root>/Constant3'
*/
if (untitled_DW.is_active_c3_untitled == 0U) {
untitled_DW.is_active_c3_untitled = 1U;
untitled_DW.is_c3_untitled = untitled_IN_a;
untitled_B.FrameIndex = 0.0;
} else if (untitled_DW.is_c3_untitled == untitled_IN_a) {
untitled_DW.is_c3_untitled = untitled_IN_a1;
untitled_B.FrameIndex++;
} else {
/* case IN_a1: */
if (untitled_B.FrameIndex >= 39.0) {
untitled_DW.is_c3_untitled = untitled_IN_a;
untitled_B.FrameIndex = 0.0;
}
}
/* End of Chart: '<S1>/Chart' */
/* Gain: '<S1>/Gain' */
rtb_Gain = 8.0 * untitled_B.FrameIndex;
for (i = 0; i < 8; i++) {
/* Selector: '<S1>/Selector' incorporates:
* Constant: '<Root>/Constant2'
*/
untitled_B.Selector[i] = untitled_ConstP.Constant2_Value[i + (int32_T)
rtb_Gain];
}
/* S-Function (scanpack): '<S1>/CAN Pack' */
/* S-Function (scanpack): '<S1>/CAN Pack' */
untitled_B.CANPack.ID = 10U;
untitled_B.CANPack.Length = 8U;
untitled_B.CANPack.Extended = 0U;
untitled_B.CANPack.Remote = 0;
untitled_B.CANPack.Data[0] = 0;
untitled_B.CANPack.Data[1] = 0;
untitled_B.CANPack.Data[2] = 0;
untitled_B.CANPack.Data[3] = 0;
untitled_B.CANPack.Data[4] = 0;
untitled_B.CANPack.Data[5] = 0;
untitled_B.CANPack.Data[6] = 0;
untitled_B.CANPack.Data[7] = 0;
{
(void) memcpy((untitled_B.CANPack.Data), &untitled_B.Selector[0],
8 * sizeof(uint8_T));
}
/* S-Function (svntcantransmit): '<S1>/CAN Transmit' */
sErr = GetErrorBuffer(&untitled_DW.CANTransmit_CANTransmit[0U]);
/* S-Function (scanpack): '<S1>/CAN Pack' incorporates:
* S-Function (svntcantransmit): '<S1>/CAN Transmit'
*/
inputMsgRef = &untitled_B.CANPack;
/* S-Function (svntcantransmit): '<S1>/CAN Transmit' */
LibOutputs_CANTransmit(&untitled_DW.CANTransmit_CANTransmit[0U], inputMsgRef,
1);
if (*sErr != 0) {
rtmSetErrorStatus(untitled_M, sErr);
rtmSetStopRequested(untitled_M, 1);
}
}
/* Model initialize function */
void untitled_initialize(void)
{
{
int32_T bitParams[4];
char_T *sErr;
/* Start for S-Function (svntcantransmit): '<S1>/CAN Transmit' */
sErr = GetErrorBuffer(&untitled_DW.CANTransmit_CANTransmit[0U]);
CreateHostLibrary("slhostlibcantransmit.dll",
&untitled_DW.CANTransmit_CANTransmit[0U]);
if (*sErr == 0) {
bitParams[0U] = 1;
bitParams[1U] = 4;
bitParams[2U] = 3;
bitParams[3U] = 1;
LibCreate_CANTransmit(&untitled_DW.CANTransmit_CANTransmit[0U], "vector",
"slvectorxlwrapper.dll", "Virtual", 0, 1, 1, 1,
"canslconverter", "vectorxlplugin", 500000.0,
&bitParams[0U], 0, 0, 0, 1.0, 0);
}
if (*sErr == 0) {
LibStart(&untitled_DW.CANTransmit_CANTransmit[0U]);
}
if (*sErr != 0) {
rtmSetErrorStatus(untitled_M, sErr);
rtmSetStopRequested(untitled_M, 1);
}
/* End of Start for S-Function (svntcantransmit): '<S1>/CAN Transmit' */
/* Enable for S-Function (svntcantransmit): '<S1>/CAN Transmit' */
sErr = GetErrorBuffer(&untitled_DW.CANTransmit_CANTransmit[0U]);
LibReset(&untitled_DW.CANTransmit_CANTransmit[0U]);
LibStart(&untitled_DW.CANTransmit_CANTransmit[0U]);
if (*sErr != 0) {
rtmSetErrorStatus(untitled_M, sErr);
rtmSetStopRequested(untitled_M, 1);
}
/* End of Enable for S-Function (svntcantransmit): '<S1>/CAN Transmit' */
}
}
/* Model terminate function */
void untitled_terminate(void)
{
char_T *sErr;
/* Terminate for S-Function (svntcantransmit): '<S1>/CAN Transmit' */
sErr = GetErrorBuffer(&untitled_DW.CANTransmit_CANTransmit[0U]);
LibTerminate(&untitled_DW.CANTransmit_CANTransmit[0U]);
if (*sErr != 0) {
rtmSetErrorStatus(untitled_M, sErr);
rtmSetStopRequested(untitled_M, 1);
}
LibDestroy(&untitled_DW.CANTransmit_CANTransmit[0U], 0);
DestroyHostLibrary(&untitled_DW.CANTransmit_CANTransmit[0U]);
/* End of Terminate for S-Function (svntcantransmit): '<S1>/CAN Transmit' */
}按照上述示例生成的代码,调试时监测到CAN网络上的瞬时负载率非常均匀地保持在25%左右。并且不管报文数量的如何变化,软件都能自动地柔性处理,既不会负载率过高,也不会总线资源浪费,同时又能将报文频率性能发挥到最大。如下图所示:
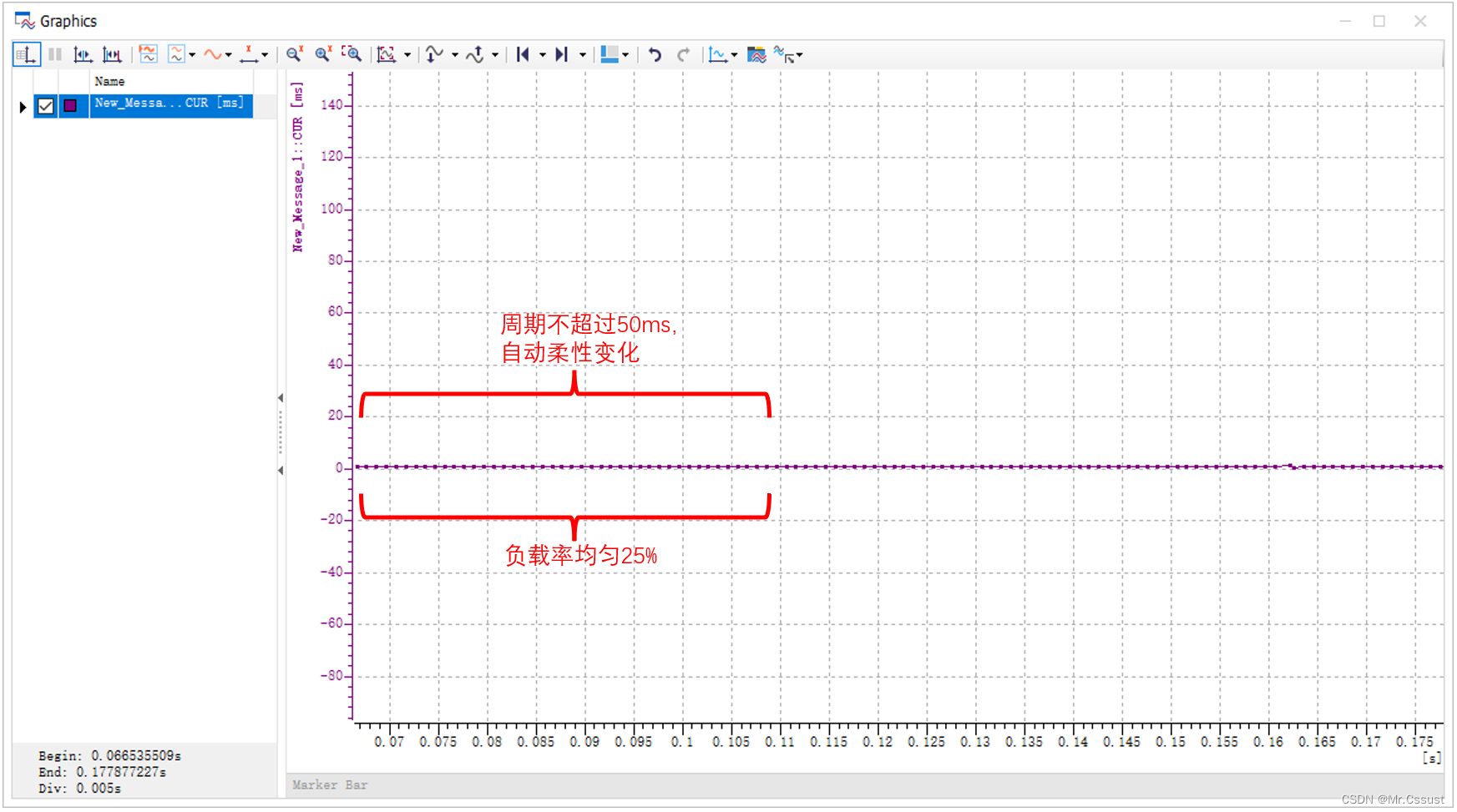
分析上述网络通信的特点,已实现了项目中的需求,同时也利用通信负载柔性均衡算法把性能发挥到了最优。
分析和应用
通信负载均衡,在不同的软件开发项目中重要性是不一样的。一种是实时性要求高的的应用(例如底盘控制),每一帧消息都要在准确的时间发送出去,不允许冲突抢占导致的延误。另一种是网络通信资源非常小的总线(例如低速CAN),单位时间内能发送的报文数量本来就比较少,所以更要仔细计算充分利用,要不然很容易因为负载不均衡导致报文阻塞。
使用通信负载柔性均衡算法时,需要注意如下几点:
1、不同波特率,理想负载率下,单位时间对应的报文数量需要仔细的计算,才能设定出最优的算法。例如:500k波特率,在25%理想负载率下,1ms对应的报文数量就是1帧。同理如果1M波特率,那么1ms对应的报文数量就是2帧。
2、计算好最优的理论算法之后,还要更具自己处理器的性能,设定一个合适的控制粒度。例如:自己的软件最快可以1ms运算一圈,那么就可以1ms控制一次发送1帧或者2帧。如果自己的软件最快只能5ms运算一圈,那么同理就5ms控制一次发送5帧或者10帧。这里的控制粒度越小,负载均衡的效果也越好,但是并非所有的平台都能达到理论极限,只要在自己平台的基础上发挥到最优即可。
3、对于有网络管理机制的应用场景,需求方可能不希望我们的50ms周期发生变化。例如,网络上的主ECU节点利用同步信号,控制着各个从ECU节点分别占用这50ms中的一小段。当我们自己节点的报文发送完之后,需要等着下一个50ms的到来,或者下一个同步信号的到来。这时候就要把FrameIndex的循环Limit固定成50ms,然后在Transmit模块上加一个使能条件FrameIndex < FrameNum。这样也能达到我们通信负载柔性均衡的目的,同时也满足主ECU节点的网络管理。
总结
以上就是本人在嵌入式软件开发中处理通信负载率不均衡问题时,一些个人理解和分析的总结,首先介绍了它的背景情况,然后展示它的初始设计和优化设计,最后分析了通信负载均衡算法的注意事项和应用场景。
后续还会分享另外几个最近总结的软件优化知识点,欢迎评论区留言、点赞、收藏和关注,这些鼓励和支持都将成文本人持续分享的动力。
另外,上述例程使用的Demo工程,可以到笔者的主页查找和下载。
版权声明:原创文章,转载和引用请注明出处和链接,侵权必究!