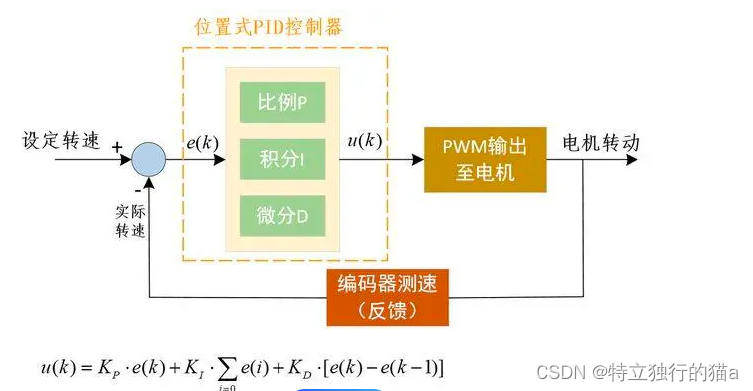
PID 控制算法是一种常用的反馈控制算法,用于控制系统的稳定性和精度。PID 分别代表比例(Proportional)、积分(Integral)和微分(Derivative),通过组合这三个部分来调节控制输出,以使系统的实际输出值尽可能接近预期的参考值。
算法介绍
PID(比例-积分-微分)控制算法是一种广泛使用的控制算法,用于调节系统的输出以匹配所需的参考输入。PID 控制器基于三个基本组件来计算其控制输出:比例(Proportional)、积分(Integral)和微分(Derivative)。
- 比例(P)控制:
- 比例控制是最简单的控制形式。控制器的输出是输入误差的一个比例。误差是参考输入与实际系统输出之间的差异。
- 比例控制可以快速响应误差,但它不能消除稳态误差(即系统稳定后仍然存在的误差)。
- 如果比例系数设置得太大,系统可能会变得不稳定,出现振荡。
- 积分(I)控制:
- 积分控制考虑了过去的误差。它通过对误差进行积分来消除稳态误差。
- 积分控制有助于减小系统稳定后的误差,但也可能导致系统响应变慢,并可能增加超调(即系统输出超过参考输入的情况)。
- 如果积分系数设置得太大,系统可能变得对扰动非常敏感,甚至可能产生积分饱和现象(即积分项累积到过大,导致系统响应异常)。
- 微分(D)控制:
- 微分控制基于误差的变化率来预测未来的误差,并据此调整控制输出。
- 微分控制有助于加快系统的响应速度,减少超调,并增加系统的稳定性。
- 然而,微分控制对噪声非常敏感,因为噪声通常会导致误差的突然变化,这可能被误认为是误差的变化率。
PID 的基本公式:
Output = K_p * Error + K_i * Integral(Error) + K_d * Derivative(Error)
其中,Error 表示期望值与实际值之间的偏差,(K_p)、(K_i) 和 (K_d) 分别表示比例、积分和微分部分的系数。如何使用 PID 控制算法:
-
确定系统模型和参数 在应用 PID 控制算法前,需要确定控制对象的数学模型和相关参数,例如比例系数 (K_p)、积分时间 (T_i)、微分时间 (T_d) 等。
-
实现 PID 控制器 在代码中实现 PID 控制器,通常需要记录上一次的误差值以及积分值,以便计算出下一次的控制输出。
PID 控制器的调整
调整 PID 控制器的参数(即 K_p、K_i 和 K_d)是 PID 控制中的关键任务。这通常涉及到一些试验和误差调整,或者使用更先进的调优方法。
对不同工况和“场景”下往往需要设置不同的PID形式,不同的PID参数达到预期控制效果,其实就是需要人工经验设定规则来适应不同工况,所以不能算是自动的控制;相信用过PID的都知道一套口诀,在实际调参依赖口诀调参,然后调出一个理想的控制曲线,调参过程依赖人工。
也可以借助野火的 PID调试助手工具来调试pid的参数。

代码示例
class PIDController {
public:
double compute(double setpoint, double measurement) {
double error = setpoint - measurement;
integral += error * dt;
derivative = (error - prevError) / dt;
output = Kp * error + Ki * integral + Kd * derivative;
prevError = error;
return output;
}
private:
double Kp = 1.0;
double Ki = 0.1;
double Kd = 0.01;
double integral = 0.0;
double derivative = 0.0;
double prevError = 0.0;
double output = 0.0;
double dt = 0.1; // 采样时间
};
-
调试和调整参数 调试 PID 控制器需要不断调整参数,观察实际输出值与期望值之间的偏差,逐步优化参数,以实现系统的稳定控制。
-
实时应用 在实际控制系统中,将计算得到的 PID 控制器的输出值应用到相应的执行机构或系统中,以实现期望的控制效果。
以下是一个简单的 C++ 示例,演示如何实现一个基本的 PID 控制器,并在一个简单的模拟系统中应用该控制器。这个例子中,模拟一个以恒定速度运动的小车,通过 PID 控制器调节小车的速度,使其尽快达到期望速度。注意,这只是一个简单的演示,实际系统中可能需要更复杂的控制逻辑和参数调整。
#include <iostream>
class PIDController {
public:
PIDController(double kp, double ki, double kd, double dt) : Kp(kp), Ki(ki), Kd(kd), dt(dt) {}
double compute(double setpoint, double measurement) {
double error = setpoint - measurement;
integral += error * dt;
derivative = (error - prevError) / dt;
output = Kp * error + Ki * integral + Kd * derivative;
prevError = error;
return output;
}
private:
double Kp;
double Ki;
double Kd;
double dt;
double integral = 0.0;
double derivative = 0.0;
double prevError = 0.0;
double output = 0.0;
};
class Car {
public:
void setSpeed(double speed) {
currentSpeed = speed;
}
void update() {
// 模拟小车运动,这里假设小车以固定加速度加速到目标速度
currentSpeed += acceleration;
std::cout << "Current speed: " << currentSpeed << std::endl;
}
double getSpeed() const {
return currentSpeed;
}
private:
double currentSpeed = 0.0;
double acceleration = 0.1;
};
int main() {
PIDController pid(0.5, 0.01, 0.1, 0.1); // 设置 PID 控制器的参数
Car car;
double targetSpeed = 10.0; // 设置目标速度
for (int i = 0; i < 100; ++i) {
double speedError = targetSpeed - car.getSpeed();
double controlOutput = pid.compute(targetSpeed, car.getSpeed());
std::cout << "speedError: " << speedError << std::endl;
std::cout << "controlOutput: " << controlOutput << std::endl;
car.setSpeed(9+i/50.0); // 应用控制输出调节小车速度
car.update();
}
return 0;
}
在这个简单的示例中,创建了一个 PIDController 类来模拟 PID 控制器的行为,然后创建了一个 Car 类来模拟一个运动的小车。在主函数中,设置 PID 控制器的参数,并循环调用 PID 控制器来调节小车的速度,直到达到目标速度为止。
注意,实际的 PID 控制器需要根据具体的控制对象和系统需求进行调整和优化。
c语言实现
#include "pid.h"
/**************************************************************
*批量复位PID函数
* @param[in]
* @param[out]
* @return
***************************************************************/
void pidRest(PidObject **pid,const uint8_t len)
{
uint8_t i;
for(i=0;i<len;i++)
{
pid[i]->integ = 0;
pid[i]->prevError = 0;
pid[i]->out = 0;
pid[i]->offset = 0;
}
}
/**************************************************************
* Update the PID parameters.
*
* @param[in] pid A pointer to the pid object.
* @param[in] measured The measured value
* @param[in] updateError Set to TRUE if error should be calculated.
* Set to False if pidSetError() has been used.
* @return PID algorithm output
***************************************************************/
void pidUpdate(PidObject* pid,const float dt)
{
float error;
float deriv;
error = pid->desired - pid->measured + pid->offset; //当前角度与实际角度的误差
pid->integ += error * dt; //误差积分累加值
// pid->integ = LIMIT(pid->integ,pid->IntegLimitLow,pid->IntegLimitHigh); //进行积分限幅
deriv = (error - pid->prevError)/dt; //前后两次误差做微分
pid->out = pid->kp * error + pid->ki * pid->integ + pid->kd * deriv;//PID输出
//pid->out = LIMIT(pid->out,pid->OutLimitLow,pid->OutLimitHigh); //输出限幅
pid->prevError = error; //更新上次的误差
}
/**************************************************************
* CascadePID
* @param[in]
* @param[out]
* @return
***************************************************************/
void CascadePID(PidObject* pidRate,PidObject* pidAngE,const float dt) //串级PID
{
pidUpdate(pidAngE,dt); //先计算外环
pidRate->desired = pidAngE->out;
pidUpdate(pidRate,dt); //再计算内环
}应用示例
#include "pid.h"
#include <stdio.h>
int main()
{
printf("hello pid test \n");
float target_water_level = 100.0; // 目标水位10L
float feedback_water_level = 0.0; // 初始水位0L
PidObject pidRate;
PidObject *pPidObject[]={&pidRate};
pidRest(pPidObject,1);
pidRate.kp = 0.1f; // 比例系数
pidRate.ki = 0.01f; // 积分系数
pidRate.kd = 0.05f; // 微分系数
float dt = 0.003;// 3ms 采样时间
pidRate.measured = 0;
pidRate.desired = 100.00; //控制期望值 10L
// 模拟控制循环
for (int i = 0; i < 100; i++) { // 模拟水位反馈
pidUpdate(&pidRate,dt); //pid处理
feedback_water_level = 91+i/50.00; // 模拟每次循环水位波动 (传感器水位采集反馈值)
pidRate.measured = feedback_water_level;
//pidRate.desired = pidRate.out;
// 输出当前水位和阀门开度补偿值
printf("Feedback Water Level: %.2fL, Valve Openness: %.2f\n", feedback_water_level, pidRate.out);
}
return 0;
}为什么pwm可以调速
pwm占空比就是一个脉冲周期内有效电平在整个周期所占的比例。
通过调节PWM的占空比就能调节IO口上电压的持续性变化,因此也能够控制外设的功率进行持续性变化,也就能控制直流电机的转速快慢。
一种情况,对于电阻,直流电机来说,有占空比虽然从微观来说是波,但从宏观来说,就相当于将输入电压打个折扣再输出,输入5伏,占空比是50%,那么输出就是2.5伏,一般来说,直流电机的转速是和其输入电压成正比的。
还有种情况,就是通过连续改变PWM的占空比,将直流电切成大小不一,有规律的波形,宏观上形成不同频率的正弦波,这就叫斩波。通过斩波可以产生任意频率的交流电。
其他资源
PID算法详解及实例分析_pid控制原理详解及实例说明-CSDN博客
一文搞懂PID控制算法_pid算法-CSDN博客
什么是PID控制?
PWM原理 PWM频率与占空比详解-CSDN博客
电机控制进阶——PID速度控制 - 知乎
通俗易懂!讲解PID! - 知乎
编码器计数原理与电机测速原理——多图解析 - 知乎
电机PID控制补充篇-野火上位机串口协议介绍 - 知乎
电机控制进阶——PID速度控制
野火串口调试助手PID功能(文末有工程链接)_野火多功能调试助手-CSDN博客