

还是那句话不能掉以轻心,全力以赴吧,遇事不要慌,该做的都做了,冷静沉稳的处理,看看配置,看看代码,还是不行就重启,都没问题换个板子
下面对比较复杂的部分的处理过程进行展现:

这个我是配合定时器和中断按键处理的,大致思路,按下按键在按键中断函数中将相应标志位置1
void HAL_GPIO_EXTI_Callback(uint16_t GPIO_Pin){ // 按键
//OLED_ShowString(0, "victory");
STARTTEST = 1;
MEMFLAG = 1;
}
主函函数识别标志位变为1则做相应ADC获取,以及OLED显示
void Function_StartAdc(){
if(STARTTEST == 1){
//Function_OledInit(10);
HAL_TIM_Base_Start_IT(&htim7);
Function_GetAdc();
Function_OledShow();
HAL_GPIO_WritePin(K1_GPIO_Port, K1_Pin, GPIO_PIN_SET);
}else {
HAL_GPIO_WritePin(K1_GPIO_Port, K1_Pin, GPIO_PIN_RESET);
OLED_Clear();
//HAL_GPIO_WritePin(OLED_Power_GPIO_Port, OLED_Power_Pin, GPIO_PIN_SET);
}
}
检测数值是否稳定,在第一次获取ADC数值的时候备份一下,在定时器里去分析是否稳定,不稳定定时器计数值归零否者继续计数
void Function_GetAdc(){
uint16_t AdcData[2];
for(unsigned char i = 0; i < 2; i ++){
HAL_ADC_Start(&hadc);
HAL_ADC_PollForConversion(&hadc, 0xff);
AdcData[i] = HAL_ADC_GetValue(&hadc);
HAL_Delay(5);
}
HAL_ADC_Stop(&hadc);
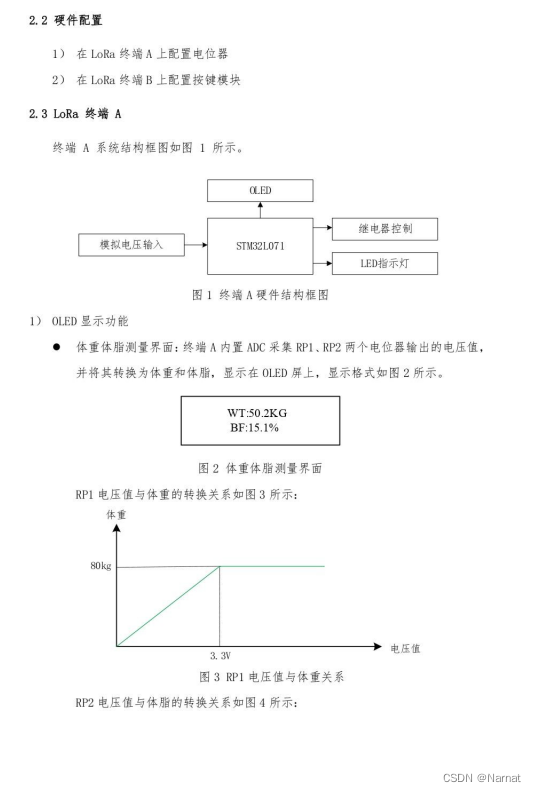
RP1Value = AdcData[1] * 3.30f / 4095;
RP2Value = AdcData[0] * 3.30f / 4095;
if(MEMFLAG == 1){ // 做备份
MEMFLAG = 0;
MEMRP1VALUE = RP1Value;
MEMRP2VALUE = RP2Value;
}
if(RP1Value <= 3.3) WT = RP1Value * 80 / 3.3;
else WT = 80;
if(RP2Value <= 1) BF = 5;
else if(RP2Value > 1 && RP2Value < 2) BF = RP2Value * 40 - 35;
else BF = 45;
}
void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim){ // 10ms
//OLED_ShowString(0, "victory");
if(STARTTEST == 1){ // 测量体重
if(COUNTNUMBER >= 300){
//HAL_TIM_Base_Stop_IT(&htim7);
STARTTEST = 0;
TESTVICTORY = 1;
COUNTNUMBER = 0;
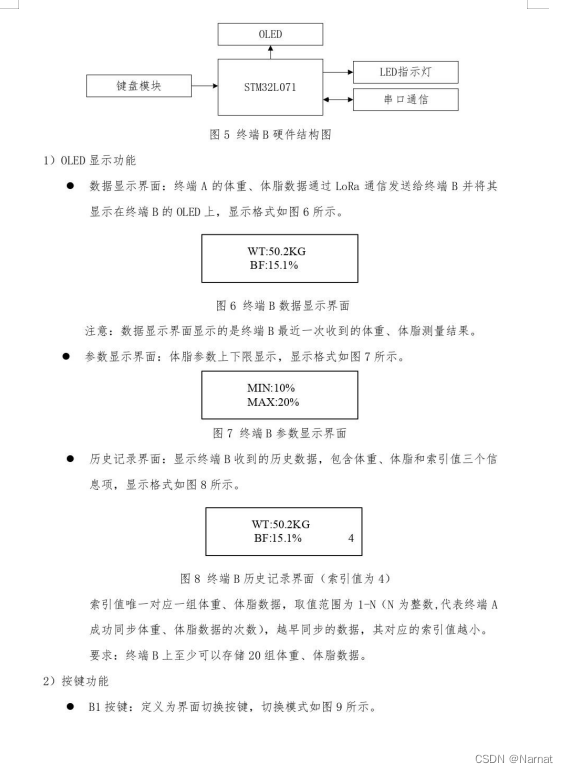
sprintf((char* )SENDMSG, "#%.1f#%.1f", WT, BF);
LORA_Tx(SENDMSG, 20);
}
DERTARP1 = RP1Value - MEMRP1VALUE;
DERTARP2 = RP2Value - MEMRP2VALUE;
if(DERTARP1 > -0.1 && DERTARP1 < 0.1 && DERTARP2 > -0.1 && DERTARP2 < 0.1) COUNTNUMBER ++;
else {
MEMRP1VALUE = RP1Value;
MEMRP2VALUE = RP2Value;
COUNTNUMBER = 0;
}
}
if(TESTVICTORY == 1){ // LD5闪烁
if(COUNTNUMBER <= 300) {
COUNTNUMBER ++;
if(COUNTNUMBER % 10 == 0) HAL_GPIO_TogglePin(LD5_GPIO_Port, LD5_Pin);
}
else{
TESTVICTORY = 0;
HAL_TIM_Base_Stop_IT(&htim7);
HAL_GPIO_WritePin(LD5_GPIO_Port, LD5_Pin, GPIO_PIN_SET);
COUNTNUMBER = 0;
}
}
}
LD5是每0.1s反转一次,也就是整10位反转,所以直接%10即可
够3s后OLED直接清屏就行,断开电源开启还要初始化很麻烦

储存用结构体
typedef struct{
unsigned char MEMWT[10];
unsigned char MEMBF[10];
}MEMO;
符合要求得数据直接memcpy过来就行

对于LORA传输的数据要做一些处理,再判断
void Function_LorRxHandle(){
if(RECEIVEMSG[0] == '#'){
Function_ArrayClean(RXWT, sizeof(WT));
Function_ArrayClean(RXBF, sizeof(BF));
unsigned char i = 1;
unsigned char j = 0;
while(RECEIVEMSG[i] != '#') RXWT[j ++] = RECEIVEMSG[i ++];
i ++;
j = 0;
while(RECEIVEMSG[i] != '\0') RXBF[j ++] = RECEIVEMSG[i ++];
//OLED_ShowString(0, WT);
//OLED_ShowString(2, BF);
TPRXBF = strtof((char* )RXBF, NULL);
TPMAXBF = strtof((char* )MAXBF, NULL);
TPMINBF = strtof((char* )MINBF, NULL);
if(!(TPRXBF >= TPMINBF && TPRXBF <= TPMAXBF)){
HAL_TIM_Base_Start_IT(&htim7);
}else{
HAL_TIM_Base_Stop_IT(&htim7);
HAL_GPIO_WritePin(LD5_GPIO_Port, LD5_Pin, GPIO_PIN_SET);
Function_ArrayClean(WT, sizeof(WT));
Function_ArrayClean(BF, sizeof(BF));
memcpy(BF, RXBF, 10);
memcpy(WT, RXWT, 10);
memcpy(MEMORX[INDEX].MEMBF, BF, 10);
memcpy(MEMORX[INDEX].MEMWT, WT, 10);
INDEX = (INDEX + 1) % 20;
}
}
if(RECEIVEMSG[0] != '\0') Function_ArrayClean(RECEIVEMSG, sizeof(RECEIVEMSG));
}
unsigned char i = 1;
unsigned char j = 0;
while(RECEIVEMSG[i] != '#') RXWT[j ++] = RECEIVEMSG[i ++];
i ++; // 跳过'#'
j = 0;
while(RECEIVEMSG[i] != '\0') RXBF[j ++] = RECEIVEMSG[i ++];
这一步部分的作用是将例如#value1#value2分别取出来,因为value1和2的位数不知道所以用memcpy是不行的,这就要用算法来操作了
操作之前记得将数组里的值清除一下,防止这次的数据被前面接收的数据污染:
void Function_ArrayClean(unsigned char* array, uint16_t len){
for(unsigned char i = 0; i < len; i ++) array[i] = '\0';
}
if(RECEIVEMSG[0] != '\0') Function_ArrayClean(RECEIVEMSG, sizeof(RECEIVEMSG));
将处理函数放外面是因为,比赛可能有其他人发送的数据可能会被误收,更要清除

对串口数据的处理更是将神器strtof函数运用到极致,真是不得不佩服大佬写的函数
void Function_UartRxMsgHandle(){
if(UARTRXMSG[0] != '\0'){
HAL_Delay(10);
//OLED_ShowString(0, UARTRXMSG);
TEMP = strtof((char* )UARTRXMSG, &p);
if(*p == '\0'){ // 查询指令
if(TEMP >= 1 && TEMP <= 20){
Function_ArrayClean(SENDMSG, sizeof(SENDMSG));
sprintf((char* )SENDMSG, "WT:%sKG,BF:%s%%", MEMORX[(int)TEMP - 1].MEMWT, MEMORX[(int)TEMP - 1].MEMBF);
HAL_UART_Transmit(&huart2, SENDMSG, sizeof(SENDMSG), 0xff);
}else{
HAL_UART_Transmit(&huart2, (unsigned char* )SDERREOR, strlen(SDERREOR), 0xff);
}
}else if(*p == ','){ // 改变指令
Function_ArrayClean(TEMPUARTRX, sizeof(TEMPUARTRX));
unsigned char i = 0;
unsigned char j = 0;
while(UARTRXMSG[i ++] != ',');
while(UARTRXMSG[i] != '\0') TEMPUARTRX[j ++] = UARTRXMSG[i ++];
TEMP1 = strtof((char* )TEMPUARTRX, &q);
if(*q == '\0' && TEMP <= TEMP1 && TEMP >= 0 && TEMP <= 45 && TEMP1 >= 0 && TEMP1 <= 45){
sprintf((char* )MINBF, "%d", (int)TEMP);
sprintf((char* )MAXBF, "%d", (int)TEMP1);
}else HAL_UART_Transmit(&huart2, (unsigned char* )SDERREOR, strlen(SDERREOR), 0xff);
}else HAL_UART_Transmit(&huart2, (unsigned char* )SDERREOR, strlen(SDERREOR), 0xff);
Function_ArrayClean(UARTRXMSG, sizeof(UARTRXMSG));
}
}
延时10ms是因为是DMA接收,所以让CPU别急着处理让DMA将数据接受完再处理
之前讲过strtof的性质,将字符串转换成浮点型直到不能转换为止,所以利用这个性质:
将数据先全部转换一次,如果全部都能转换即指针指向空字符,那么就是查询语句,如果指针指向’,‘那就说明是设置值命令,如果指向的是其他字符,则可返还错误,如果指向‘,’此时可利用上面分割#字符的方式将’,'字符分割到另一个数组做分析,再次分析另一个设置数据合不合法
while(UARTRXMSG[i ++] != ',');
while(UARTRXMSG[i] != '\0') TEMPUARTRX[j ++] = UARTRXMSG[i ++];
先跳过第一个‘,’再对后一个字符串做处理
这个处理过程让我找到了后端开发的感觉,先写主体判断框架,再实现框架内部内容
这一部分得慢慢来慢慢调试
![线上 | OpenSergo - [规范]](https://img-blog.csdnimg.cn/direct/0ecfa2bab42f42e8abfd14b9282f5cb4.png)