摘 要
:
近年来
,
步进电机凭借其定位精度高
、
使用方便
、
性价比高
、
容易控制等优点
,
在各领域受到广泛应用
。
文中利用C52
单片机设计了一种步进电机控制系统
,
介绍了其总体方案
、
主控制模块
、
驱动电路
、
键盘
、
晶振电路模块等
,
并使用Protues绘制仿真图
,
与编程软件进行联合调试仿真
。
仿真结果表明
,
所设计的步进电机控制系统正确有效
。
关键词
:
单片机
;
步进电机
;
控制系统
;
研究
;
仿真
0 引 言
步进电机又称脉冲电动机,凭借其定位精度高、使用方便、性价比高、容易控制等优点,在办公自动化、工厂自动化和计算机外部设备等领域中受到广泛应用
,故对其控制系统的研究颇为重要。
本文采用
C52
单片机
设计步进电机的控制系统,并使用 Protues
绘制仿真图,同时与编程软件(
Keil4
)进行联合调试仿真,仿真结果表明,所设计的步进电机控制系统使用便捷、有效。
1 步进电机简介
步进电机是一种感应电动机,根据电子电路的原理将直流电变为分时供电、多相时序控制的电流,用分时电流为步进电机供电,使步进电机正常工作,而驱动器就是一种能为其分时供电,多相时序的控制器
。
步进电机在不超过负载的情况下,其转速、停止的位置只由脉冲频率以及脉冲数决定,而负载以外的变化对其无影响,当驱动器接收到一个脉冲信号时,便会驱动步进电机按设定好的方向转动一个固定的角度(“步距角”),其旋转按设定方向一步步运行。步进电机通过控制脉冲个数来控制角位移量,从而达到精准定位。同时也可通过控制脉冲频率来控制其速度与加速度,从而达到调速的目的。
2 硬件设计
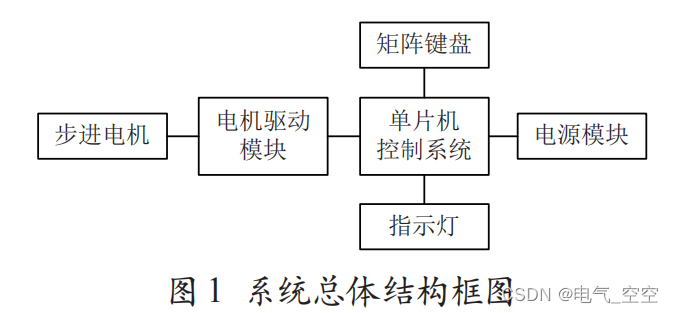
本文以
STC89C52
单片机为核心处理器,将按键作为输入模块,以控制步进电机的正转、反转、步进,并实现正反转。步进电机选用 28BYJ-48 型四相八拍式步进电机,系统构成如图
1
所示。
由于单片机直接输出的脉冲信号不大,无法让步进电机正常工作,因此不能将其直接连接到步进电机上,需要在它们之间加上一个驱动电路。对于直流电流小于 0.5 A
的步进电机来说,可通过型号为 ULN2003A
的达林顿芯片来驱动步进电机,从而使其正常工作。ULN2003A
系列驱动器的引脚与步进电机连线示意图如图 2
所示。左边
1
~
7
为输入端,接单片机P2 口的输出端,驱动信号由
P2
口的
P2.0
至
P2.3
输出,左侧10~
16
为输出端引脚,接步进电机,引脚
9
接
5 V
电源,该驱动器提供的电流最高为 0.5 A
。

键盘是由若干按键组成的按键矩阵,是一种最简单的单片机输入设备,通过键盘输入相应数据和指令来实现人对机器的控制,键盘电路如图 3
所示。

本文采用外部中断的方式。信号输入部分为
P3
口,
P1
口为发光二极管显示部分,P2
口作为电机的驱动部分,整体仿真电路如图 4
所示。

3 程序设计
系统主程序流程如图
5
所示。系统上电复位,对参数进行初始化,然后检测串口是否发送数据,当确定串口数据发送后程序便调用相应的子程序 ;如果串口没有发送数据则程序重新初始化。系统上电复位后,键盘初始化并复位,然后进入按键查询,等待操作。当有按键按下后,系统开始调用相应的子程序。按键程序流程如图 6
所示,步进电机工作流程如图 7
所示。

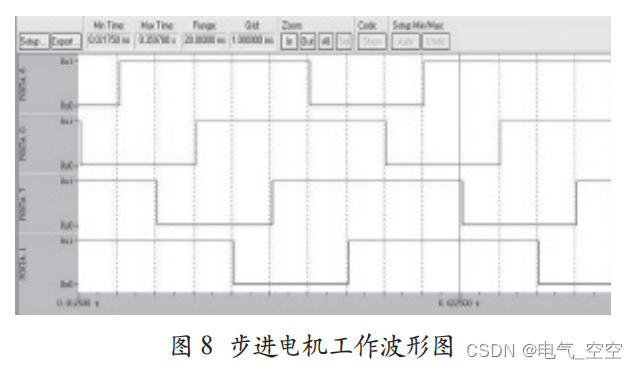
4 仿真调试
使用
Protues
绘制仿真图,与编程软件(
Keil4
)进行联合 调试仿真。当步进电机接收到连续不断的脉冲信号时,则持续运转。步进电机的绕组通电状态每改变一次就会产生一个脉冲信号,转子也相应转过一个步距角。当通电状态结束一个循环时,转子会转过一个齿距。四相八拍方式的通电顺序为:A 相线圈最先通电 ;然后转换变为
A
,
B
两相线圈同时通电 ;接着 B
相线圈通电 ;再之后
B
,
C
两相线圈同时通电……(即按 A-AB-B-BC-C-CD-D-DA-A
…的顺序进行)。当步进电机定子绕组按顺序周期性通电时,转子沿设定方向一步步转动。步进电机工作波形如图 8 所示。
5 结 语
本文采用
C52
单片机来设计步进电机的控制系统,介绍 了其总体方案、主控制模块、驱动电路、键盘、晶振电路模块等, 并使用 Protues
绘制仿真图,与编程软件进行联合调试仿真, 仿真结果表明,所设计的步进电机控制系统正确有效。







![[ C++ ] 深入理解模板( 初 阶 )](https://img-blog.csdnimg.cn/direct/763c7807f8c84e8bbd5cb76483989a77.png)