章节一:Windows 下的 PIP 安装
官网安装教程地址

按照里面的教程去安装

如果使用cuda版本的还要安装tensorrt,不然后面运行demo程序的程序会报如下错。
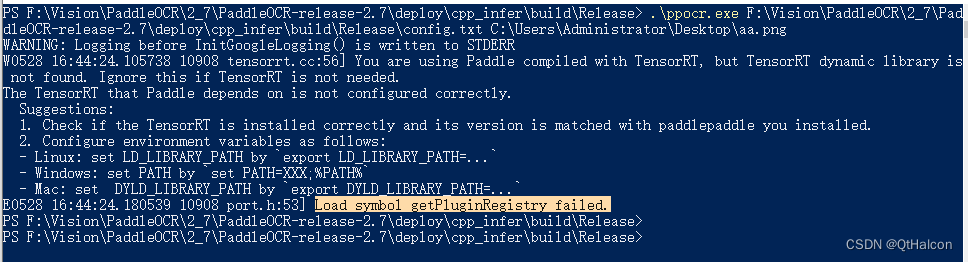
下载TensorRT 8版本,tensorrt下载地址
章节二:编译源码
进入官网源码地址
下载release2.7
下载三个模型

下载推理预测库

官网下载地址,根据自己的情况下载CPU或对应的自己CUDA版本的GPU
用CMAK打开如下文件
添加路径OpenCV路径和预测库路径。
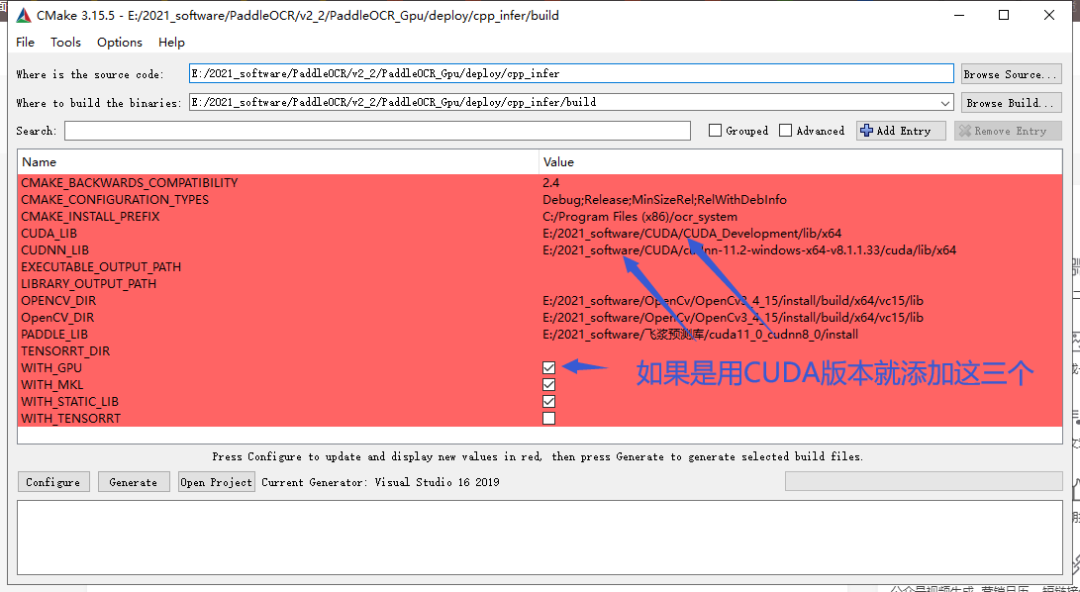
然后Configers,再Generate,如果有报错不用管他,最后在你的构建目录生成了项目,然后开始编译。
但是编译会报错
在utility.cpp中无法打开包括文件"dirent.h":No such file or directory<dirent.h>是个unix系统下常见的接口,但windows平台的MSVC编译器并没有提供这个接口,对于跨平台的项目开发就会带来一些麻烦,如果在MSVC下编译时可能因为windows平台缺少这个接口就要为windows平台另外写一些代码。
不过大佬已经做了一个windows版本的<dirent.h>,放在了github上面,链接如下:
https://github.com/tronkko/dirent下载完后加入这个文件夹:

然后重新编译,但是会报错找不到_stat,做如下修改就可以了。
//修改前
struct stat s;
_stat(dir_name, &s);
//修改后
struct _stat64 s;
_stat64(dir_name, &s);最后就可以生成成功,生成成功要将这几个dll复制到程序目录。
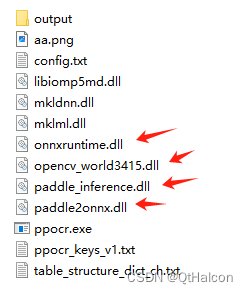
onnxruntime和paddle2onnx在这里

将这个文件复制到程序目录
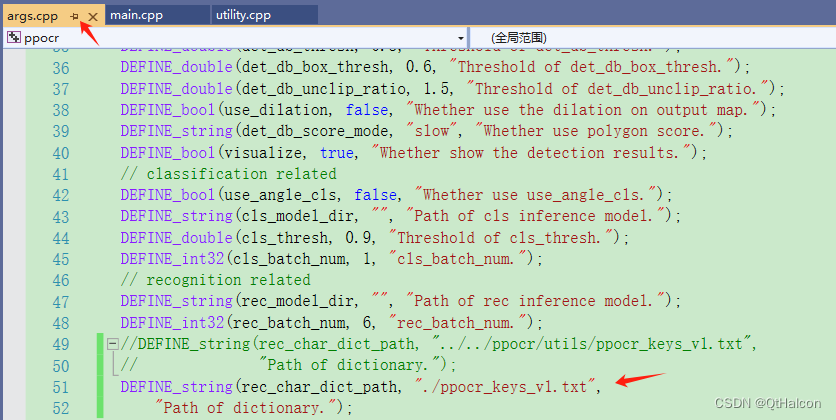
源码里面这个文件的路径也要改一下
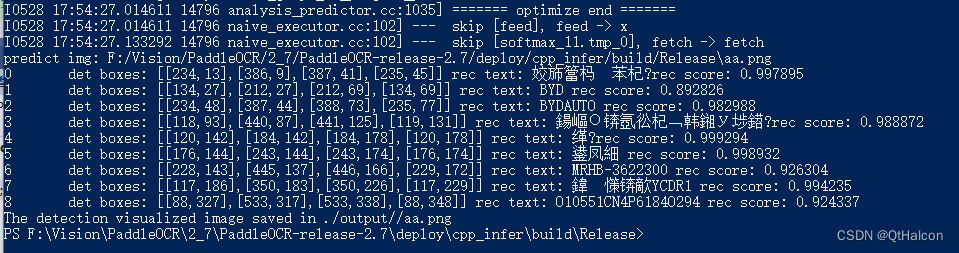
然后输入命令运行程序,下面的路径根据自己情况去修改
./ppocr.exe --det_model_dir=F:/Vision/PaddleOCR/2_7/model/ch_PP-OCRv4_det_infer --cls_model_dir=F:/Vision/PaddleOCR/2_7/model/ch_ppocr_mobile_v2.0_cls_infer --rec_model_dir=F:/Vision/PaddleOCR/2_7/model/ch_PP-OCRv4_rec_infer --image_dir=F:/Vision/PaddleOCR/2_7/PaddleOCR-release-2.7/deploy/cpp_infer/build/Release/aa.png运行结果如下
章节三:在Qt上编译运行
pro文件构建
QT += core gui widgets
greaterThan(QT_MAJOR_VERSION, 4): QT += widgets
CONFIG += c++17
DEFINES += QT_DEPRECATED_WARNINGS
##################################################################
#指定生成的文件存放位置
##################################################################
MOC_DIR = $$PWD/temp/moc
RCC_DIR = $$PWD/temp/rcc
UI_DIR = $$PWD/temp/ui
OBJECTS_DIR = $$PWD/temp/obj
DESTDIR = $$PWD/temp/bin
CONFIG(debug, debug|release) {
QMAKE_CXXFLAGS_DEBUG += /MTd
}
CONFIG(release, debug|release) {
QMAKE_CXXFLAGS_RELEASE += /MT
}
PaddleOCR_ROOT = F:/Vision/PaddleOCR/2_7/OCR_Demo/OCR_Demo/ocr
SOURCES += \
# $$PaddleOCR_ROOT/src/args.cpp \
$$PaddleOCR_ROOT/src/clipper.cpp \
$$PaddleOCR_ROOT/src/ocr_cls.cpp \
$$PaddleOCR_ROOT/src/ocr_det.cpp \
$$PaddleOCR_ROOT/src/ocr_rec.cpp \
# $$PaddleOCR_ROOT/src/paddleocr.cpp \
# $$PaddleOCR_ROOT/src/paddlestructure.cpp \
$$PaddleOCR_ROOT/src/postprocess_op.cpp \
$$PaddleOCR_ROOT/src/preprocess_op.cpp \
$$PaddleOCR_ROOT/src/structure_layout.cpp \
$$PaddleOCR_ROOT/src/structure_table.cpp \
$$PaddleOCR_ROOT/src/utility.cpp \
ScreenWidget/screen.cpp \
ScreenWidget/screenwidget.cpp \
main.cpp \
mainwindow.cpp \
my_config.cpp \
my_paddleocr.cpp
HEADERS += \
$$PaddleOCR_ROOT/include/ocr_cls.h \
$$PaddleOCR_ROOT/include/ocr_det.h \
$$PaddleOCR_ROOT/include/ocr_rec.h \
# $$PaddleOCR_ROOT/include/paddleocr.h \
# $$PaddleOCR_ROOT/include/paddlestructure.h \
$$PaddleOCR_ROOT/include/postprocess_op.h \
$$PaddleOCR_ROOT/include/preprocess_op.h \
$$PaddleOCR_ROOT/include/structure_layout.h \
$$PaddleOCR_ROOT/include/structure_table.h \
$$PaddleOCR_ROOT/include/utility.h \
# $$PaddleOCR_ROOT/include/args.h \
$$PaddleOCR_ROOT/include/clipper.h \
$$PaddleOCR_ROOT/include/dirent.h \
ScreenWidget/screen.h \
ScreenWidget/screenwidget.h \
mainwindow.h \
my_config.h \
my_paddleocr.h
FORMS += \
mainwindow.ui
INCLUDEPATH += $$PaddleOCR_ROOT
INCLUDEPATH += $$PaddleOCR_ROOT/include
INCLUDEPATH += $$PWD\ScreenWidget
Inference_ROOT = F:/Vision/PaddleOCR/2_7/prelib/cuda11_0
INCLUDEPATH += $$Inference_ROOT/paddle/include
INCLUDEPATH += $$Inference_ROOT/third_party/install/protobuf/include
INCLUDEPATH += $$Inference_ROOT/third_party/install/glog/include
#INCLUDEPATH += $$Inference_ROOT/third_party/install/gflags/include
INCLUDEPATH += $$Inference_ROOT/third_party/install/xxhash/include
INCLUDEPATH += $$Inference_ROOT/third_party/install/mklml/include
INCLUDEPATH += $$Inference_ROOT/third_party/install/mkldnn/include
LIBS += -L$$Inference_ROOT/paddle/lib -lpaddle_inference
LIBS += -L$$Inference_ROOT/third_party/install/mklml/lib -lmklml
LIBS += -L$$Inference_ROOT/third_party/install/mklml/lib -llibiomp5md
LIBS += -L$$Inference_ROOT/third_party/install/mkldnn/lib -lmkldnn
LIBS += -L$$Inference_ROOT/third_party/install/glog/lib -lglog
#LIBS += -L$$Inference_ROOT/third_party/install/gflags/lib -lgflags_static
LIBS += -L$$Inference_ROOT/third_party/install/protobuf/lib -llibprotobuf
LIBS += -L$$Inference_ROOT/third_party/install/xxhash/lib -lxxhash
OpenCV_ROOT = E:/2021_software/OpenCv/OpenCv3_4_15/install/opencv/build
INCLUDEPATH += $$OpenCV_ROOT/include
INCLUDEPATH += $$OpenCV_ROOT/include/opencv
INCLUDEPATH += $$OpenCV_ROOT/include/opencv2
LIBS += -L$$OpenCV_ROOT/x64/vc15/lib -lopencv_world3415
自定义一个config类
#pragma once
#include <iomanip>
#include <iostream>
#include <map>
#include <ostream>
#include <string>
#include <vector>
#include "include/utility.h"
using namespace PaddleOCR;
class MY_OCRConfig {
public:
explicit MY_OCRConfig(const std::string &config_file);
// common args
bool use_gpu = false;
bool use_tensorrt = false;
int gpu_id = 0;
int gpu_mem = 4000;
int cpu_threads = 10;
bool enable_mkldnn = false;
std::string precision = "fp32";
bool benchmark = false;
std::string output = "./output/";
std::string image_dir = "";
std::string type = "ocr";
// detection related
std::string det_model_dir = "";
std::string limit_type = "max";
int limit_side_len = 960;
double det_db_thresh = 0.3;
double det_db_box_thresh = 0.6;
double det_db_unclip_ratio = 1.5;
bool use_dilation = false;
std::string det_db_score_mode = "slow";
bool visualize = true;
// classification related
bool use_angle_cls = false;
std::string cls_model_dir = "";
double cls_thresh = 0.9;
int cls_batch_num = 1;
// recognition related
std::string rec_model_dir = "";
int rec_batch_num = 6;
std::string rec_char_dict_path = "./ppocr_keys_v1.txt";
int rec_img_h = 48;
int rec_img_w = 320;
// layout model related
std::string layout_model_dir = "";
std::string layout_dict_path = "../../ppocr/utils/dict/layout_dict/layout_publaynet_dict.txt";
double layout_score_threshold = 0.5;
double layout_nms_threshold = 0.5;
// structure model related
std::string table_model_dir = "";
int table_max_len = 488;
int table_batch_num = 1;
bool merge_no_span_structure = true;
std::string table_char_dict_path = "../../ppocr/utils/dict/table_structure_dict_ch.txt";
// ocr forward related
bool det = true;
bool rec = true;
bool cls = false;
bool table = false;
bool layout = false;
private:
// Load configuration
std::map<std::string, std::string> LoadConfig(const std::string &config_file);
std::vector<std::string> split(const std::string &str,
const std::string &delim);
std::map<std::string, std::string> config_map_;
};
#include "my_config.h"
#include <qdebug.h>
std::vector<std::string> MY_OCRConfig::split(const std::string &str,
const std::string &delim) {
std::vector<std::string> res;
if ("" == str)
return res;
int strlen = str.length() + 1;
char *strs = new char[strlen];
std::strcpy(strs, str.c_str());
int delimlen = delim.length() + 1;
char *d = new char[delimlen];
std::strcpy(d, delim.c_str());
char *p = std::strtok(strs, d);
while (p) {
std::string s = p;
res.push_back(s);
p = std::strtok(NULL, d);
}
delete[] strs;
delete[] d;
return res;
}
std::map<std::string, std::string>
MY_OCRConfig::LoadConfig(const std::string &config_path) {
auto config = Utility::ReadDict(config_path);
std::map<std::string, std::string> dict;
for (int i = 0; i < config.size(); i++) {
// pass for empty line or comment
if (config[i].size() <= 1 || config[i][0] == '#') {
continue;
}
//
std::vector<std::string> res = split(config[i], " ");
if (res.size() < 2) {
dict[res[0]] = "";
}else{
dict[res[0]] = res[1];
}
}
return dict;
}
MY_OCRConfig::MY_OCRConfig(const std::string &config_file)
{
config_map_ = LoadConfig(config_file);
// common args
this->use_gpu = (config_map_["use_gpu"] == "true");
this->use_tensorrt = (config_map_["use_tensorrt"] == "true");
this->gpu_id = stoi(config_map_["gpu_id"]);
this->gpu_mem = stoi(config_map_["gpu_mem"]);
this->cpu_threads = stoi(config_map_["cpu_threads"]);
this->enable_mkldnn = (config_map_["enable_mkldnn"] == "true");
this->precision = config_map_["precision"];
this->benchmark = (config_map_["benchmark"] == "true");
this->output = config_map_["output"];
this->image_dir = config_map_["image_dir"];
this->type = config_map_["type"];
// detection related
this->det_model_dir = config_map_["det_model_dir"];
this->limit_type = config_map_["limit_type"];
this->limit_side_len = stoi(config_map_["limit_side_len"]);
this->det_db_thresh = stod(config_map_["det_db_thresh"]);
this->det_db_box_thresh = stod(config_map_["det_db_box_thresh"]);
this->det_db_unclip_ratio = stod(config_map_["det_db_unclip_ratio"]);
this->use_dilation = (config_map_["use_dilation"] == "true");
this->det_db_score_mode = config_map_["det_db_score_mode"];
this->visualize = (config_map_["visualize"] == "true");
// classification related
this->use_angle_cls = (config_map_["use_angle_cls"] == "true");
this->cls_model_dir = config_map_["cls_model_dir"];
this->cls_thresh = stod(config_map_["cls_thresh"]);
this->cls_batch_num = stoi(config_map_["cls_batch_num"]);
// recognition related
this->rec_model_dir = config_map_["rec_model_dir"];
this->rec_batch_num = stoi(config_map_["rec_batch_num"]);
this->rec_char_dict_path = config_map_["rec_char_dict_path"];
this->rec_img_h = stoi(config_map_["rec_img_h"]);
this->rec_img_w = stoi(config_map_["rec_img_w"]);
// layout model related
this->layout_model_dir = config_map_["layout_model_dir"];
this->layout_dict_path = config_map_["layout_dict_path"];
this->layout_score_threshold = stod(config_map_["layout_score_threshold"]);
this->layout_nms_threshold = stod(config_map_["layout_nms_threshold"]);
// structure model related
this->table_model_dir = config_map_["table_model_dir"];
this->table_max_len = stoi(config_map_["table_max_len"]);
this->table_batch_num = stoi(config_map_["table_batch_num"]);
this->merge_no_span_structure = (config_map_["merge_no_span_structure"] == "true");
this->table_char_dict_path = config_map_["table_char_dict_path"];
// ocr forward related
this->det = (config_map_["det"] == "true");
this->rec = (config_map_["rec"] == "true");
this->cls = (config_map_["cls"] == "true");
this->table = (config_map_["table"] == "true");
this->layout = (config_map_["layout"] == "true");
qDebug()<<this->det<<config_map_["det"].c_str()<<QString(config_map_["det"].c_str())<<this->rec<<this->cls<<this->rec_model_dir.c_str();
}
自定义一个ocr类
#pragma once
#include <include/ocr_cls.h>
#include <include/ocr_det.h>
#include <include/ocr_rec.h>
#include "my_config.h"
using namespace PaddleOCR;
class MY_PPOCR {
public:
explicit MY_PPOCR();
~MY_PPOCR();
std::vector<std::vector<OCRPredictResult>> ocr(std::vector<cv::Mat> img_list,
bool det = true,
bool rec = true,
bool cls = true);
std::vector<OCRPredictResult> ocr(cv::Mat img, bool det = true,
bool rec = true, bool cls = true);
void reset_timer();
void benchmark_log(int img_num);
MY_OCRConfig *p_config;
protected:
std::vector<double> time_info_det = {0, 0, 0};
std::vector<double> time_info_rec = {0, 0, 0};
std::vector<double> time_info_cls = {0, 0, 0};
void det(cv::Mat img, std::vector<OCRPredictResult> &ocr_results);
void rec(std::vector<cv::Mat> img_list,
std::vector<OCRPredictResult> &ocr_results);
void cls(std::vector<cv::Mat> img_list,
std::vector<OCRPredictResult> &ocr_results);
private:
std::unique_ptr<DBDetector> detector_;
std::unique_ptr<Classifier> classifier_;
std::unique_ptr<CRNNRecognizer> recognizer_;
};
#include "my_paddleocr.h"
#include <qdebug.h>
//#include "auto_log/autolog.h"
MY_PPOCR::MY_PPOCR()
{
qDebug()<<"aaa1";
p_config = new MY_OCRConfig("./ocrconfig.txt");
qDebug()<<"aaa2";
//
if (p_config->det) {
this->detector_.reset(new DBDetector(
p_config->det_model_dir, p_config->use_gpu, p_config->gpu_id, p_config->gpu_mem,
p_config->cpu_threads, p_config->enable_mkldnn, p_config->limit_type,
p_config->limit_side_len, p_config->det_db_thresh, p_config->det_db_box_thresh,
p_config->det_db_unclip_ratio, p_config->det_db_score_mode, p_config->use_dilation,
p_config->use_tensorrt, p_config->precision));
}
qDebug()<<"aaa3";
//
if (p_config->cls && p_config->use_angle_cls) {
this->classifier_.reset(new Classifier(
p_config->cls_model_dir, p_config->use_gpu, p_config->gpu_id, p_config->gpu_mem,
p_config->cpu_threads, p_config->enable_mkldnn, p_config->cls_thresh,
p_config->use_tensorrt, p_config->precision, p_config->cls_batch_num));
}
qDebug()<<"aaa4";
//
if (p_config->rec) {
this->recognizer_.reset(new CRNNRecognizer(
p_config->rec_model_dir, p_config->use_gpu, p_config->gpu_id, p_config->gpu_mem,
p_config->cpu_threads, p_config->enable_mkldnn, p_config->rec_char_dict_path,
p_config->use_tensorrt, p_config->precision, p_config->rec_batch_num,
p_config->rec_img_h, p_config->rec_img_w));
}
qDebug()<<"aaa5";
}
MY_PPOCR::~MY_PPOCR()
{
delete p_config;
}
std::vector<std::vector<OCRPredictResult>>
MY_PPOCR::ocr(std::vector<cv::Mat> img_list, bool det, bool rec, bool cls)
{
std::vector<std::vector<OCRPredictResult>> ocr_results;
if (!det) {
std::vector<OCRPredictResult> ocr_result;
ocr_result.resize(img_list.size());
if (cls && this->classifier_) {
this->cls(img_list, ocr_result);
for (int i = 0; i < img_list.size(); i++) {
if (ocr_result[i].cls_label % 2 == 1 &&
ocr_result[i].cls_score > this->classifier_->cls_thresh) {
cv::rotate(img_list[i], img_list[i], 1);
}
}
}
if (rec) {
this->rec(img_list, ocr_result);
}
for (int i = 0; i < ocr_result.size(); ++i) {
std::vector<OCRPredictResult> ocr_result_tmp;
ocr_result_tmp.push_back(ocr_result[i]);
ocr_results.push_back(ocr_result_tmp);
}
} else {
for (int i = 0; i < img_list.size(); ++i) {
std::vector<OCRPredictResult> ocr_result =
this->ocr(img_list[i], true, rec, cls);
ocr_results.push_back(ocr_result);
}
}
return ocr_results;
}
std::vector<OCRPredictResult> MY_PPOCR::ocr(cv::Mat img, bool det, bool rec, bool cls)
{
std::vector<OCRPredictResult> ocr_result;
// det
this->det(img, ocr_result);
// crop image
std::vector<cv::Mat> img_list;
for (int j = 0; j < ocr_result.size(); j++) {
cv::Mat crop_img;
crop_img = Utility::GetRotateCropImage(img, ocr_result[j].box);
img_list.push_back(crop_img);
}
// cls
if (cls && this->classifier_) {
this->cls(img_list, ocr_result);
for (int i = 0; i < img_list.size(); i++) {
if (ocr_result[i].cls_label % 2 == 1 &&
ocr_result[i].cls_score > this->classifier_->cls_thresh) {
cv::rotate(img_list[i], img_list[i], 1);
}
}
}
// rec
if (rec) {
this->rec(img_list, ocr_result);
}
return ocr_result;
}
void MY_PPOCR::det(cv::Mat img, std::vector<OCRPredictResult> &ocr_results)
{
std::vector<std::vector<std::vector<int>>> boxes;
std::vector<double> det_times;
this->detector_->Run(img, boxes, det_times);
for (int i = 0; i < boxes.size(); i++) {
OCRPredictResult res;
res.box = boxes[i];
ocr_results.push_back(res);
}
// sort boex from top to bottom, from left to right
Utility::sorted_boxes(ocr_results);
this->time_info_det[0] += det_times[0];
this->time_info_det[1] += det_times[1];
this->time_info_det[2] += det_times[2];
}
void MY_PPOCR::rec(std::vector<cv::Mat> img_list, std::vector<OCRPredictResult> &ocr_results)
{
std::vector<std::string> rec_texts(img_list.size(), "");
std::vector<float> rec_text_scores(img_list.size(), 0);
std::vector<double> rec_times;
this->recognizer_->Run(img_list, rec_texts, rec_text_scores, rec_times);
// output rec results
for (int i = 0; i < rec_texts.size(); i++) {
ocr_results[i].text = rec_texts[i];
ocr_results[i].score = rec_text_scores[i];
}
this->time_info_rec[0] += rec_times[0];
this->time_info_rec[1] += rec_times[1];
this->time_info_rec[2] += rec_times[2];
}
void MY_PPOCR::cls(std::vector<cv::Mat> img_list, std::vector<OCRPredictResult> &ocr_results)
{
std::vector<int> cls_labels(img_list.size(), 0);
std::vector<float> cls_scores(img_list.size(), 0);
std::vector<double> cls_times;
this->classifier_->Run(img_list, cls_labels, cls_scores, cls_times);
// output cls results
for (int i = 0; i < cls_labels.size(); i++) {
ocr_results[i].cls_label = cls_labels[i];
ocr_results[i].cls_score = cls_scores[i];
}
this->time_info_cls[0] += cls_times[0];
this->time_info_cls[1] += cls_times[1];
this->time_info_cls[2] += cls_times[2];
}
void MY_PPOCR::reset_timer()
{
this->time_info_det = {0, 0, 0};
this->time_info_rec = {0, 0, 0};
this->time_info_cls = {0, 0, 0};
}
核心调用代码
//
std::vector<cv::Mat> img_list;
cv::Mat srcimg = cv::imread(qstr2str(fileName).data(), cv::IMREAD_COLOR);
img_list.push_back(srcimg);
p_ocr->reset_timer();
//
QElapsedTimer RunTimer;
RunTimer.start();
std::vector<std::vector<OCRPredictResult>> ocr_results = p_ocr->ocr(img_list, p_ocr->p_config->det, p_ocr->p_config->rec, p_ocr->p_config->cls);
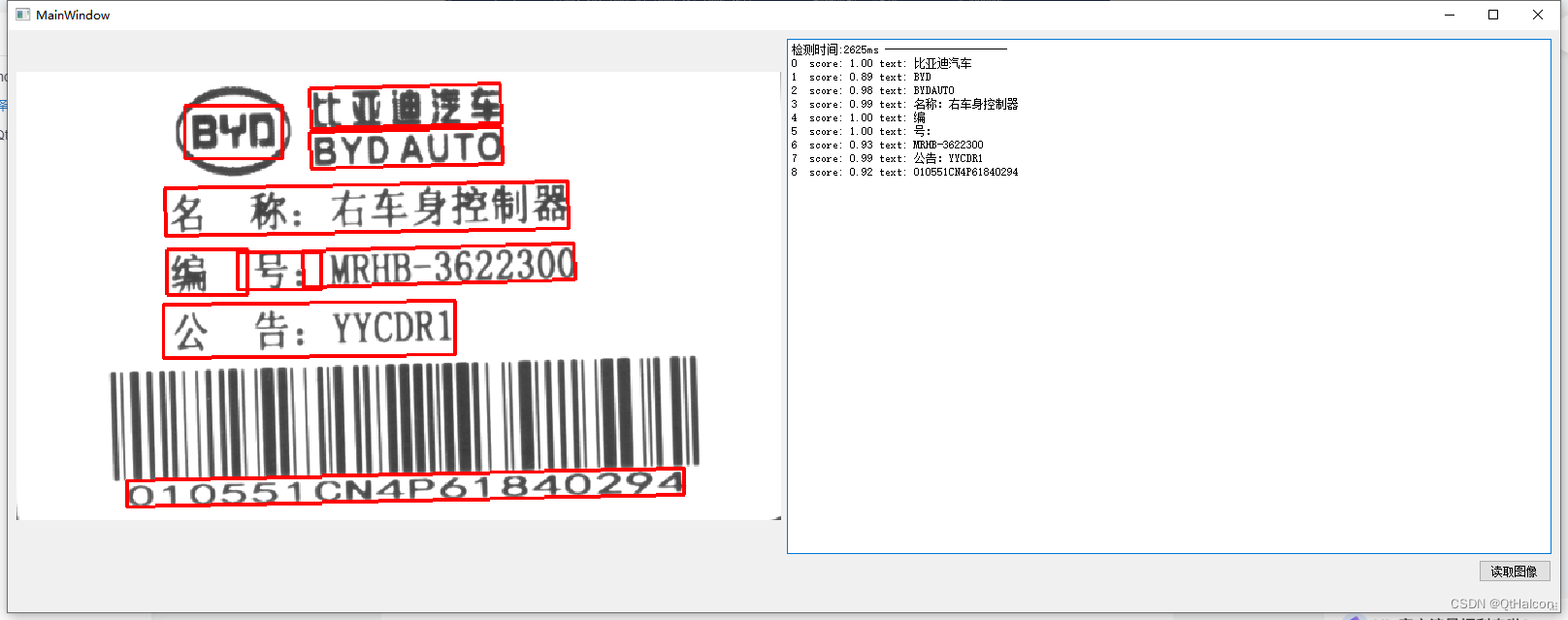
ui->textBrowser->append(QString("检测时间:%1ms ---------------------").arg(RunTimer.elapsed()));
//
for (int i = 0; i < img_list.size(); ++i) {
std::vector<OCRPredictResult> &ocr_result = ocr_results[i];
for (int i = 0; i < ocr_result.size(); i++) {
QString oustr;
oustr += QString::number(i) + " ";
// det
// std::vector<std::vector<int>> boxes = ocr_result[i].box;
// if (boxes.size() > 0) {
// oustr += "det boxes: [";
// for (int n = 0; n < boxes.size(); n++) {
// oustr += "[" + QString::number(boxes[n][0]) + "," + QString::number(boxes[n][1]) + "]";
// if (n != boxes.size() - 1) {
// oustr += ",";
// }
// }
// oustr += "]";
// }
// rec
if (ocr_result[i].score != -1.0) {
oustr += " score: " + QString::number(ocr_result[i].score,'f',2) + " text: " + QString::fromUtf8(ocr_result[i].text.c_str()) + " ";
}
// cls
if (ocr_result[i].cls_label != -1) {
oustr += "cls label: " + QString::number(ocr_result[i].cls_label) + " cls score: " + ocr_result[i].cls_score;
}
//
// oustr += "\r\n";
ui->textBrowser->append(oustr);
}
//
for (int n = 0; n < ocr_result.size(); n++) {
cv::Point rook_points[4];
//
for (int m = 0; m < ocr_result[n].box.size(); m++) {
rook_points[m] = cv::Point(int(ocr_result[n].box[m][0]), int(ocr_result[n].box[m][1]));
}
//
const cv::Point *ppt[1] = {rook_points};
int npt[] = {4};
cv::polylines(img_list[i], ppt, npt, 1, 1, CV_RGB(255, 0, 0), 2, 8, 0);
}
//
QImage outimage;
cvMat2QImage(img_list[i], outimage);
ui->label_image->setPixmap(QPixmap::fromImage(outimage.scaled(ui->label_image->width(),
ui->label_image->height(),
Qt::KeepAspectRatio)));
}程序目录包含这个几个文件,如果你没有,在源码路径和预测库路径去搜索
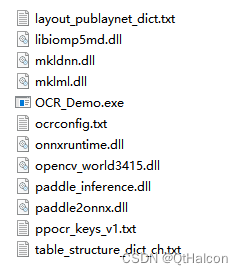
ocrconfig.txt是自定义的配置
# common args
use_gpu false
use_tensorrt false
gpu_id 0
gpu_mem 4000
cpu_threads 10
enable_mkldnn false
precision fp32
benchmark false
output ./output/
image_dir
type ocr
# detection related
det_model_dir F:\Vision\PaddleOCR\2_7\model\ch_PP-OCRv4_det_infer
limit_type max
limit_side_len 960
det_db_thresh 0.3
det_db_box_thresh 0.6
det_db_unclip_ratio 1.5
use_dilation false
det_db_score_mode slow
visualize true
# classification related
use_angle_cls false
cls_model_dir F:\Vision\PaddleOCR\2_7\model\ch_ppocr_mobile_v2.0_cls_infer
cls_thresh 0.9
cls_batch_num 1
# recognition related
rec_model_dir F:\Vision\PaddleOCR\2_7\model\ch_PP-OCRv4_rec_infer
rec_batch_num 6
rec_char_dict_path ./ppocr_keys_v1.txt
rec_img_h 48
rec_img_w 320
# layout model related
layout_model_dir
layout_dict_path ./layout_publaynet_dict.txt
layout_score_threshold 0.5
layout_nms_threshold 0.5
# structure model related
table_model_dir
table_max_len 488
table_batch_num 1
merge_no_span_structure true
table_char_dict_path ./table_structure_dict_ch.txt
# ocr forward related
det true
rec true
cls false
table false
layout false最后运行结果
有需要源码测试的, 这是源码地址







![E. Binary Deque[双指针好思维题]](https://img-blog.csdnimg.cn/direct/6a27e2a73e934a11a3cacbc9526811c1.png#pic_center)