目录
前言
通信模型
发布/订阅模型
多对多通信
异步通信
消息接口
案例一:Hello World话题通信
运行效果
发布者代码解析
程序实现
流程总结
订阅者代码解析
程序实现
流程总结
案例二:机器视觉识别
运行效果
发布者代码解析
订阅者代码解析
案例三:机器视觉识别优化
话题命令行操作
思考题
前言
节点实现了机器人各种各样的功能,但这些功能并不是独立的,之间会有千丝万缕的联系,其中最重要的一种联系方式就是话题,它是节点间传递数据的桥梁。
通信模型
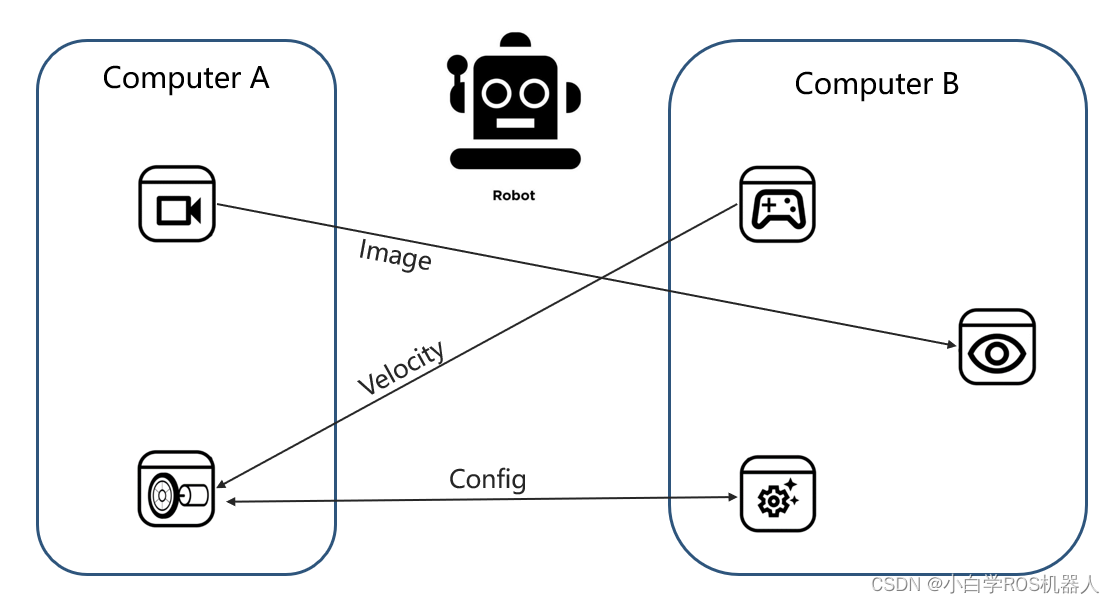
以两个机器人节点为例。A节点的功能是驱动相机这个硬件设备,获取得到相机拍摄的图像信息,B节点的功能是视频监控,将相机拍摄到的图像实时显示给用户查看。

大家可以想一下,这两个节点是不是必然存在某种关系?没错,节点A要将获取的图像数据传输给节点B,有了数据,节点B才能做这样可视化的渲染。
此时从节点A到节点B传递图像数据的方式,在ROS中,我们就称之为话题,它作为一个桥梁,实现了节点之间某一个方向上的数据传输。
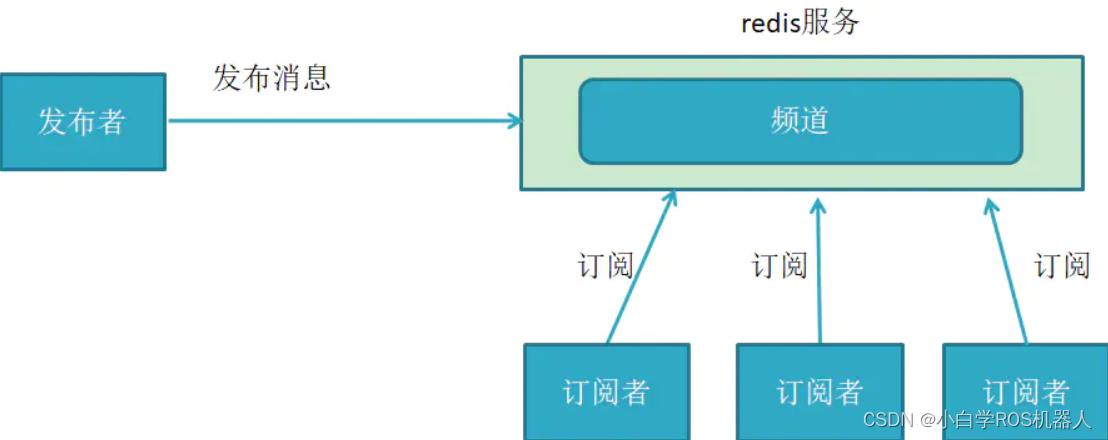
发布/订阅模型
从话题本身的实现角度来看,使用了基于DDS的发布/订阅模型,什么叫发布和订阅呢?
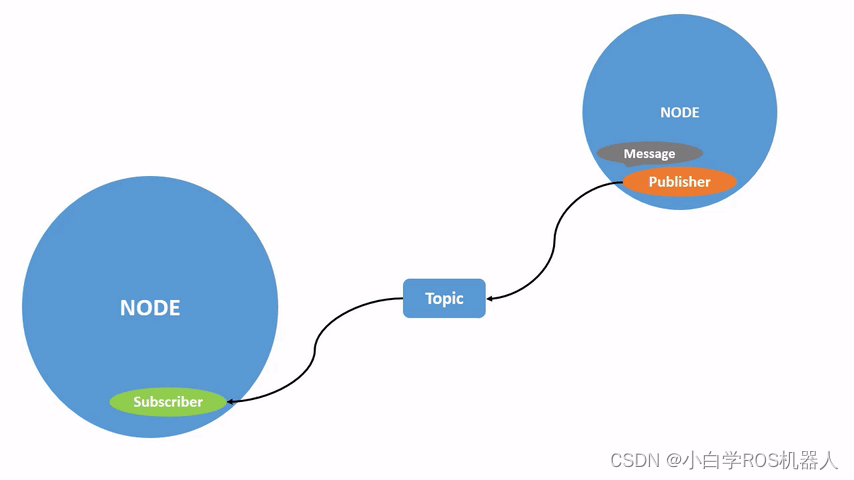
话题数据传输的特性是从一个节点到另外一个节点,发送数据的对象称之为发布者,接收数据的对象称之为订阅者,每一个话题都需要有一个名字,传输的数据也需要有固定的数据类型。
打一个比方,大家平时应该也会看微信公众号,比如有一个公众号,它的名字叫做“古月居”,这个古月居就是话题名称,公众号的发布者是古月居的小编,他会把组织好的机器人知识排版成要求格式的公众号文章,发布出去,这个文章格式,就是话题的数据类型。如果大家对这个话题感兴趣,就可以订阅“古月居”,成为订阅者之后自然就可以收到古月居的公众号文章,没有订阅的话,也就无法收到。
类似这样的发布/订阅模型在生活中随处可见,比如订阅报纸、订阅杂志等等。
多对多通信
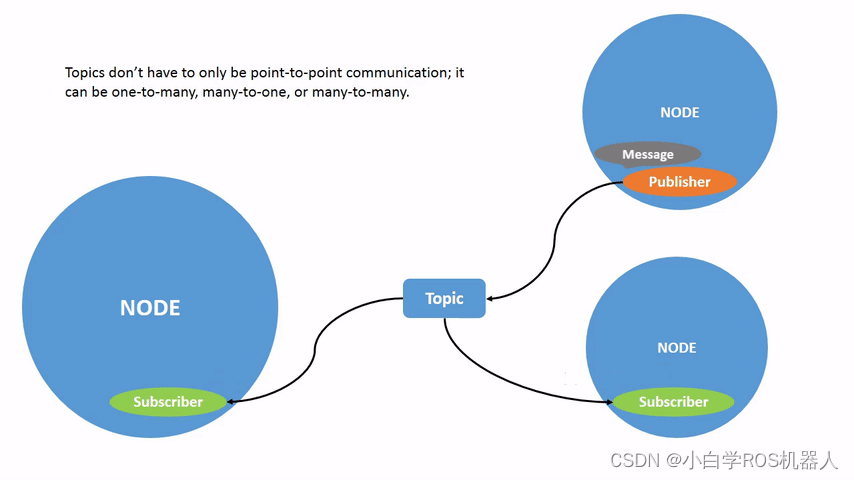
大家再仔细想下这些可以订阅的东西,是不是并不是唯一的,我们每个人可以订阅很多公众号、报纸、杂志,这些公众号、报纸、杂志也可以被很多人订阅,没错,ROS里的话题也是一样,发布者和订阅者的数量并不是唯一的,可以称之为是多对多的通信模型。
因为话题是多对多的模型,发布控制指令的摇杆可以有一个,也可以有2个、3个,订阅控制指令的机器人可以有1个,也可以有2个、3个,大家可以想象一下这个画面,似乎还是挺魔性的,如果存在多个发送指令的节点,建议大家要注意区分优先级,不然机器人可能不知道该听谁的了。
异步通信
话题通信还有一个特性,那就是异步,这个词可能有同学是第一次听说?所谓异步,只要是指发布者发出数据后,并不知道订阅者什么时候可以收到,类似古月居公众号发布一篇文章,你什么时候阅读的,古月居根本不知道,报社发出一份报纸,你什么时候收到,报社也是不知道的。这就叫做异步。
异步的特性也让话题更适合用于一些周期发布的数据,比如传感器的数据,运动控制的指令等等,如果某些逻辑性较强的指令,比如修改某一个参数,用话题传输就不太合适了。
消息接口
最后,既然是数据传输,发布者和订阅者就得统一数据的描述格式,不能一个说英文,一个理解成了中文。在ROS中,话题通信数据的描述格式称之为消息,对应编程语言中数据结构的概念。比如这里的一个图像数据,就会包含图像的长宽像素值、每个像素的RGB等等,在ROS中都有标准定义。
消息是ROS中的一种接口定义方式,与编程语言无关,我们也可以通过.msg后缀的文件自行定义,有了这样的接口,各种节点就像积木块一样,通过各种各样的接口进行拼接,组成复杂的机器人系统。
案例一:Hello World话题通信
了解了话题的基本原理,接下来我们就要开始编写代码啦。

还是从Hello World例程开始,我们来创建一个发布者,发布话题“chatter”,周期发送“Hello World”这个字符串,消息类型是ROS中标准定义的String,再创建一个订阅者,订阅“chatter”这个话题,从而接收到“Hello World”这个字符串。
运行效果
启动第一个终端,运行话题的发布者节点:
ros2 run learning_topic topic_helloworld_pub
启动第二个终端,运行话题的订阅者节点:
ros2 run learning_topic topic_helloworld_sub
可以看到发布者循环发布“Hello World”字符串消息,订阅者也以几乎同样的频率收到该话题的消息数据。
发布者代码解析
我们来看下发布者的实现方法。
程序实现
learning_topic/topic_helloworld_pub.py
#!/usr/bin/env python3
# -*- coding: utf-8 -*-
"""
@作者: 古月居(www.guyuehome.com)
@说明: ROS2话题示例-发布“Hello World”话题
"""
import rclpy # ROS2 Python接口库
from rclpy.node import Node # ROS2 节点类
from std_msgs.msg import String # 字符串消息类型
"""
创建一个发布者节点
"""
class PublisherNode(Node):
def __init__(self, name):
super().__init__(name) # ROS2节点父类初始化
self.pub = self.create_publisher(String, "chatter", 10) # 创建发布者对象(消息类型、话题名、队列长度)
self.timer = self.create_timer(0.5, self.timer_callback) # 创建一个定时器(单位为秒的周期,定时执行的回调函数)
def timer_callback(self): # 创建定时器周期执行的回调函数
msg = String() # 创建一个String类型的消息对象
msg.data = 'Hello World' # 填充消息对象中的消息数据
self.pub.publish(msg) # 发布话题消息
self.get_logger().info('Publishing: "%s"' % msg.data) # 输出日志信息,提示已经完成话题发布
def main(args=None): # ROS2节点主入口main函数
rclpy.init(args=args) # ROS2 Python接口初始化
node = PublisherNode("topic_helloworld_pub") # 创建ROS2节点对象并进行初始化
rclpy.spin(node) # 循环等待ROS2退出
node.destroy_node() # 销毁节点对象
rclpy.shutdown() # 关闭ROS2 Python接口
完成代码的编写后需要设置功能包的编译选项,让系统知道Python程序的入口,打开功能包的setup.py文件,加入如下入口点的配置:
entry_points={
'console_scripts': [
'topic_helloworld_pub = learning_topic.topic_helloworld_pub:main',
],
},
流程总结
对以上程序进行分析,如果我们想要实现一个发布者,流程如下:
- 编程接口初始化
- 创建节点并初始化
- 创建发布者对象
- 创建并填充话题消息
- 发布话题消息
- 销毁节点并关闭接口
订阅者代码解析
我们再来看下订阅者的实现方法。
程序实现
learning_topic/topic_helloworld_sub.py
#!/usr/bin/env python3
# -*- coding: utf-8 -*-
"""
@作者: 古月居(www.guyuehome.com)
@说明: ROS2话题示例-订阅“Hello World”话题消息
"""
import rclpy # ROS2 Python接口库
from rclpy.node import Node # ROS2 节点类
from std_msgs.msg import String # ROS2标准定义的String消息
"""
创建一个订阅者节点
"""
class SubscriberNode(Node):
def __init__(self, name):
super().__init__(name) # ROS2节点父类初始化
self.sub = self.create_subscription(\
String, "chatter", self.listener_callback, 10) # 创建订阅者对象(消息类型、话题名、订阅者回调函数、队列长度)
def listener_callback(self, msg): # 创建回调函数,执行收到话题消息后对数据的处理
self.get_logger().info('I heard: "%s"' % msg.data) # 输出日志信息,提示订阅收到的话题消息
def main(args=None): # ROS2节点主入口main函数
rclpy.init(args=args) # ROS2 Python接口初始化
node = SubscriberNode("topic_helloworld_sub") # 创建ROS2节点对象并进行初始化
rclpy.spin(node) # 循环等待ROS2退出
node.destroy_node() # 销毁节点对象
rclpy.shutdown() # 关闭ROS2 Python接口
完成代码的编写后需要设置功能包的编译选项,让系统知道Python程序的入口,打开功能包的setup.py文件,加入如下入口点的配置:
entry_points={
'console_scripts': [
'topic_helloworld_pub = learning_topic.topic_helloworld_pub:main',
'topic_helloworld_sub = learning_topic.topic_helloworld_sub:main',
],
},
流程总结
对以上程序进行分析,如果我们想要实现一个订阅者,流程如下:
- 编程接口初始化
- 创建节点并初始化
- 创建订阅者对象
- 回调函数处理话题数据
- 销毁节点并关闭接口
好啦,Hello World例程大家一定还不过瘾,接下来我们基于话题通信,继续优化下之前的机器视觉例程。
案例二:机器视觉识别
在节点概念的讲解过程中,我们通过一个节点驱动了相机,并且实现了对红色物体的识别。功能虽然没问题,但是对于机器人开发来讲,并没有做到程序的模块化,更好的方式是将相机驱动和视觉识别做成两个节点,节点间的联系就是这个图像数据,通过话题周期传输即可。

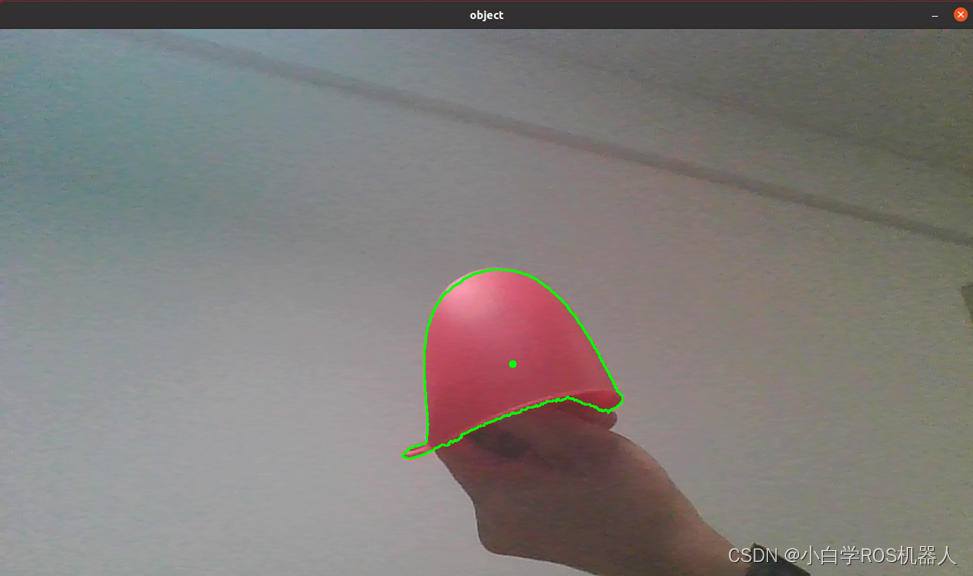
运行效果
这个图像消息在ROS中是标准定义好的,如果未来要更换另一个相机,只需要修改驱动节点,视觉识别节点完全是软件功能,就可以保持不变了,这种模块化的设计思想,可以更好的保证软件的可移植性。
好啦,说干就干,我们先来看下效果如何?
启动两个终端,分别运行以下两个节点,第一个节点驱动相机并发布图像话题,第二个节点订阅图像话题并实现视觉识别。
$ ros2 run learning_topic topic_webcam_pub
$ ros2 run learning_topic topic_webcam_sub
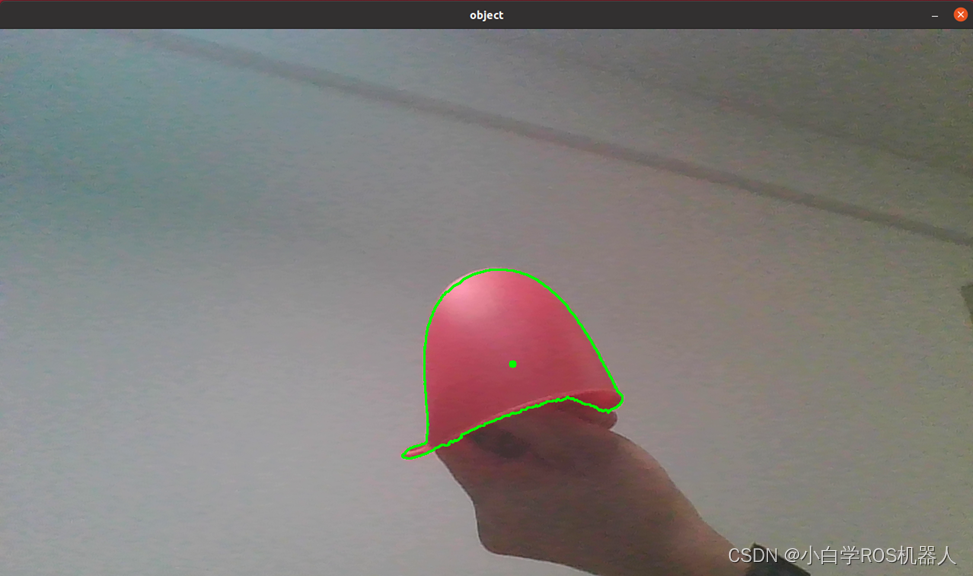
将红色物体放入相机范围内,即可看到识别效果。
发布者代码解析
learning_topic/topic_webcam_pub.py
#!/usr/bin/env python3
# -*- coding: utf-8 -*-
"""
@作者: 古月居(www.guyuehome.com)
@说明: ROS2话题示例-发布图像话题
"""
import rclpy # ROS2 Python接口库
from rclpy.node import Node # ROS2 节点类
from sensor_msgs.msg import Image # 图像消息类型
from cv_bridge import CvBridge # ROS与OpenCV图像转换类
import cv2 # Opencv图像处理库
"""
创建一个发布者节点
"""
class ImagePublisher(Node):
def __init__(self, name):
super().__init__(name) # ROS2节点父类初始化
self.publisher_ = self.create_publisher(Image, 'image_raw', 10) # 创建发布者对象(消息类型、话题名、队列长度)
self.timer = self.create_timer(0.1, self.timer_callback) # 创建一个定时器(单位为秒的周期,定时执行的回调函数)
self.cap = cv2.VideoCapture(0) # 创建一个视频采集对象,驱动相机采集图像(相机设备号)
self.cv_bridge = CvBridge() # 创建一个图像转换对象,用于稍后将OpenCV的图像转换成ROS的图像消息
def timer_callback(self):
ret, frame = self.cap.read() # 一帧一帧读取图像
if ret == True: # 如果图像读取成功
self.publisher_.publish(
self.cv_bridge.cv2_to_imgmsg(frame, 'bgr8')) # 发布图像消息
self.get_logger().info('Publishing video frame') # 输出日志信息,提示已经完成图像话题发布
def main(args=None): # ROS2节点主入口main函数
rclpy.init(args=args) # ROS2 Python接口初始化
node = ImagePublisher("topic_webcam_pub") # 创建ROS2节点对象并进行初始化
rclpy.spin(node) # 循环等待ROS2退出
node.destroy_node() # 销毁节点对象
rclpy.shutdown() # 关闭ROS2 Python接口
完成代码的编写后需要设置功能包的编译选项,让系统知道Python程序的入口,打开功能包的setup.py文件,加入如下入口点的配置:
entry_points={
'console_scripts': [
'topic_helloworld_pub = learning_topic.topic_helloworld_pub:main',
'topic_helloworld_sub = learning_topic.topic_helloworld_sub:main',
'topic_webcam_pub = learning_topic.topic_webcam_pub:main',
],
},
订阅者代码解析
learning_topic/topic_webcam_sub.py
#!/usr/bin/env python3
# -*- coding: utf-8 -*-
"""
@作者: 古月居(www.guyuehome.com)
@说明: ROS2话题示例-订阅图像话题
"""
import rclpy # ROS2 Python接口库
from rclpy.node import Node # ROS2 节点类
from sensor_msgs.msg import Image # 图像消息类型
from cv_bridge import CvBridge # ROS与OpenCV图像转换类
import cv2 # Opencv图像处理库
import numpy as np # Python数值计算库
lower_red = np.array([0, 90, 128]) # 红色的HSV阈值下限
upper_red = np.array([180, 255, 255]) # 红色的HSV阈值上限
"""
创建一个订阅者节点
"""
class ImageSubscriber(Node):
def __init__(self, name):
super().__init__(name) # ROS2节点父类初始化
self.sub = self.create_subscription(
Image, 'image_raw', self.listener_callback, 10) # 创建订阅者对象(消息类型、话题名、订阅者回调函数、队列长度)
self.cv_bridge = CvBridge() # 创建一个图像转换对象,用于OpenCV图像与ROS的图像消息的互相转换
def object_detect(self, image):
hsv_img = cv2.cvtColor(image, cv2.COLOR_BGR2HSV) # 图像从BGR颜色模型转换为HSV模型
mask_red = cv2.inRange(hsv_img, lower_red, upper_red) # 图像二值化
contours, hierarchy = cv2.findContours(
mask_red, cv2.RETR_LIST, cv2.CHAIN_APPROX_NONE) # 图像中轮廓检测
for cnt in contours: # 去除一些轮廓面积太小的噪声
if cnt.shape[0] < 150:
continue
(x, y, w, h) = cv2.boundingRect(cnt) # 得到苹果所在轮廓的左上角xy像素坐标及轮廓范围的宽和高
cv2.drawContours(image, [cnt], -1, (0, 255, 0), 2)# 将苹果的轮廓勾勒出来
cv2.circle(image, (int(x+w/2), int(y+h/2)), 5,
(0, 255, 0), -1) # 将苹果的图像中心点画出来
cv2.imshow("object", image) # 使用OpenCV显示处理后的图像效果
cv2.waitKey(10)
def listener_callback(self, data):
self.get_logger().info('Receiving video frame') # 输出日志信息,提示已进入回调函数
image = self.cv_bridge.imgmsg_to_cv2(data, 'bgr8') # 将ROS的图像消息转化成OpenCV图像
self.object_detect(image) # 苹果检测
def main(args=None): # ROS2节点主入口main函数
rclpy.init(args=args) # ROS2 Python接口初始化
node = ImageSubscriber("topic_webcam_sub") # 创建ROS2节点对象并进行初始化
rclpy.spin(node) # 循环等待ROS2退出
node.destroy_node() # 销毁节点对象
rclpy.shutdown() # 关闭ROS2 Python接口
完成代码的编写后需要设置功能包的编译选项,让系统知道Python程序的入口,打开功能包的setup.py文件,加入如下入口点的配置:
entry_points={
'console_scripts': [
'topic_helloworld_pub = learning_topic.topic_helloworld_pub:main',
'topic_helloworld_sub = learning_topic.topic_helloworld_sub:main',
'topic_webcam_pub = learning_topic.topic_webcam_pub:main',
'topic_webcam_sub = learning_topic.topic_webcam_sub:main',
],
},
案例三:机器视觉识别优化
通过话题对原本节点功能的解耦,似乎让视觉识别的例程焕然一新了,不过似乎还有哪里不太对劲,大家有感觉到么?
ROS的目标不是提高软件复用率么,现在视觉识别的节点可以复用了,相机驱动节点好像不行呀,每换一个相机,是不是都得换一个驱动节点?这当然是不可能的!
常用的usb相机驱动一般都是通用的,ROS中也集成了usb相机的标准驱动,我们只需要通过这样一行指令,就可以安装好,无论你用什么样的相机,只要符合usb接口协议,就可以直接使用ROS中的相机驱动节点,发布标准的图像话题了。
sudo apt install ros-humble-usb-cam这样,我们的代码又得到了进一步精简,刚才自己写的图像发布节点换成了这样一句指令,视觉识别节点不需要做任何变化。
$ ros2 run usb_cam usb_cam_node_exe
$ ros2 run learning_topic topic_webcam_sub
话题命令行操作
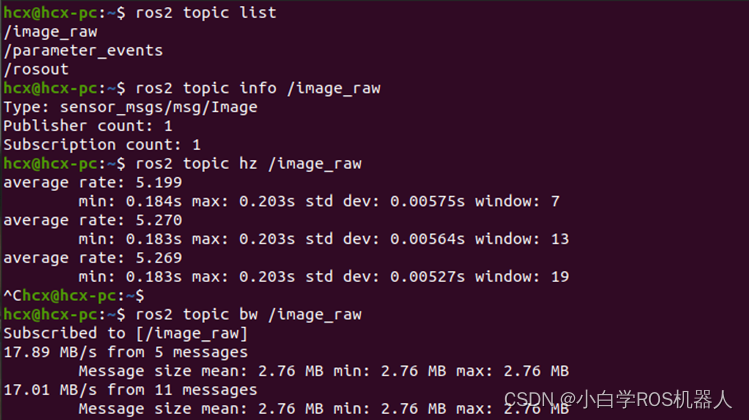
话题命令的常用操作如下:
$ ros2 topic list # 查看话题列表
$ ros2 topic info <topic_name> # 查看话题信息
$ ros2 topic hz <topic_name> # 查看话题发布频率
$ ros2 topic bw <topic_name> # 查看话题传输带宽
$ ros2 topic echo <topic_name> # 查看话题数据
$ ros2 topic pub <topic_name> <msg_type> <msg_data> # 发布话题消息
思考题
关于话题通信的原理和实现方法我们就讲到这里,给大家留一个思考题:话题通信的特性是单向传输,适合周期性的数据传递,对于一个复杂的机器人系统来讲,这种特性肯定无法满足所有数据传输的需求,大家是否能够举几个例子,是话题通信无法完成的呢?



![mysql 8 [HY000][1114] The table ‘/tmp/#sql4c3_3e5a0_2‘ is full](https://img-blog.csdnimg.cn/direct/70ff6e8339ba425192fe99e894f3d46e.png)