文章目录
- 前言
- 一、外形与质感
- 二、软件测评
- 1. 系统界面
- 2. ROS安装
- 3. ROS节点测试
- 4. SLAM算法测试
- 总结
前言
今天刚收到了官方寄来的“香橙派 AI Pro”开发板,这篇文章将会对香橙派 AI Pro的外形、质感、运行速度进行一个测评,然后我会在这个开发板上安装一个Ubuntu22.04系统,然后配置ROS2,并尝试运行2D激光SLAM算法和3D激光SLAM算法,以此对其性能进行测试和评价。
一、外形与质感
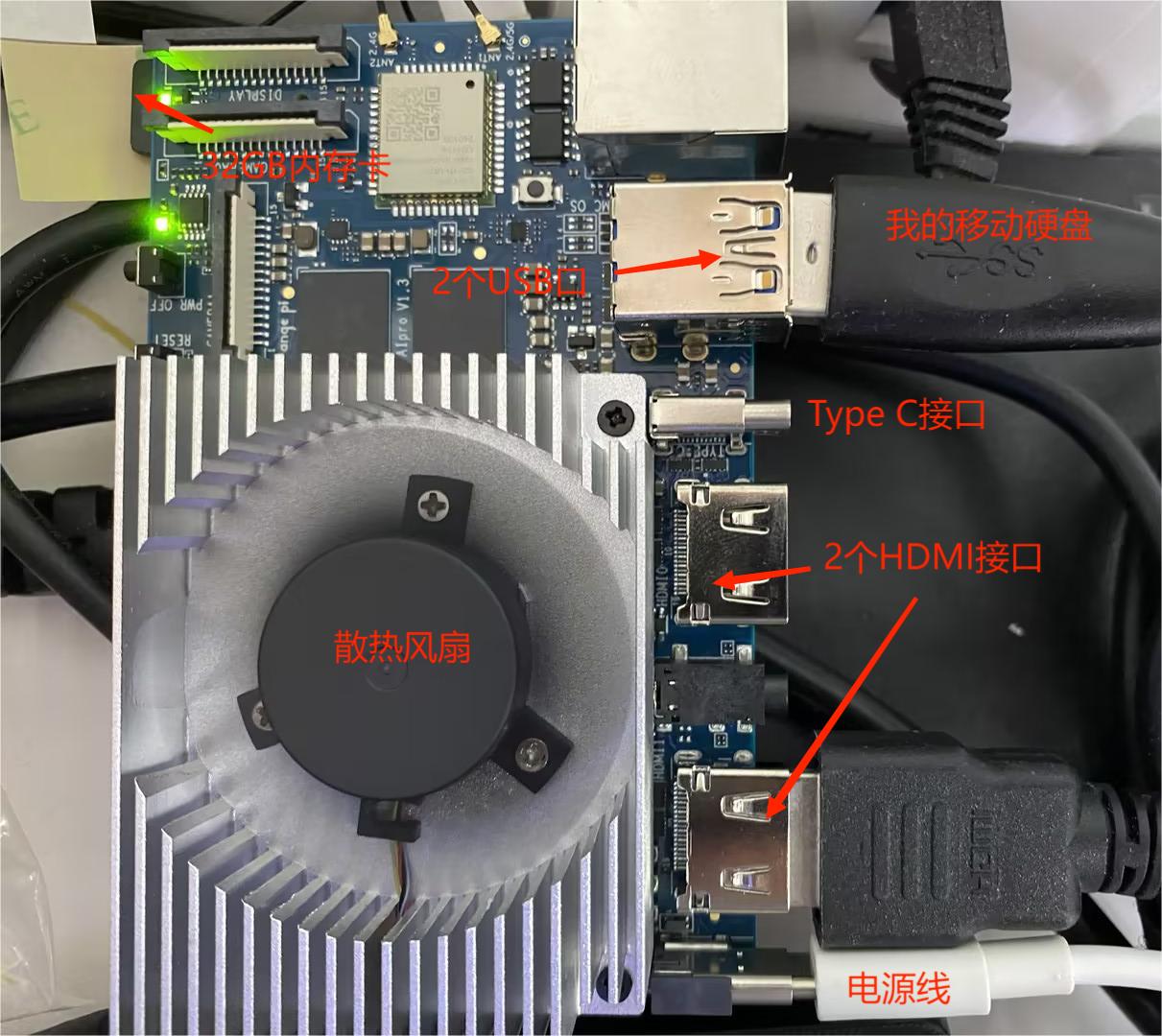
收到开发板时,官方已经很体贴的将硬件帮忙装配好了,已经安装好了散热风扇和内存卡。

香橙派 AI Pro 开发板给人的第一印象是其紧凑而精致的设计,包装非常精美,刚打开第一感觉就是非常具有科技感(拍照发给女朋友,她说好高级哈哈哈哈哈)。从提供的图片中可以看到,开发板采用了小巧的尺寸,各个接口设计非常紧凑,非常适合嵌入式应用场景或配置到小车上。其边缘圆润,避免了锋利感,同时也增加了整体的亲和力。不足之处可能就是USB接口比树莓派少了两个,在调试时,可能需要连接一个拓展坞,然后连接键鼠使用。
在质感方面,香橙派 AI Pro 显然采用了高质量的材料制造。其表面处理光滑,色泽均匀,这不仅提升了外观的美观度,还确保了长期的耐用性。此外,板上的元件排列整齐,标签清晰,让我看起来就很赏心悦目哈哈哈哈哈。
二、软件测评
1. 系统界面
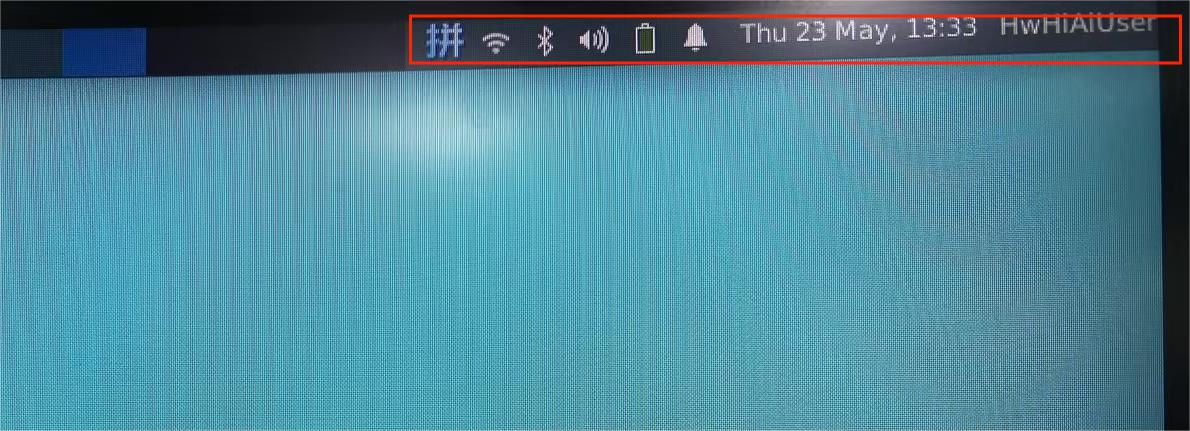
刚收到开发板时,官方已经预先为我们安装好了Ubuntu22.04系统(话说我是想安装Ubuntu20.04的,Ubuntu22.04强迫我学习了ROS2),开机界面是下面这个样子的:

看起来应该是把Ubuntu22.04和香橙派 AI Pro本身的系统融合起来了,但是整体界面看起来很简洁,屏幕最下端的浮窗设计与Mac系统类似,增加了使用便捷性的同时,又让人感觉很有高级感。
另外,让我比较眼前一亮的是右上角这个设计,不像我之前使用的Ubuntu系统一样,有时候刚装好系统有时候没有WiFI模块,有时候少个蓝牙模块,或者还得自己装个输入法,这里全都帮我配置好了!而且还有一个电量显示模块,非常精致!
2. ROS安装
接下来,我连接了WiFi,参考鱼香ROS进行ROS2的一键安装,安装过程非常丝滑,没有任何卡顿出现,开发板也没有很烫手,运行过程中风扇也不会出现噪声。
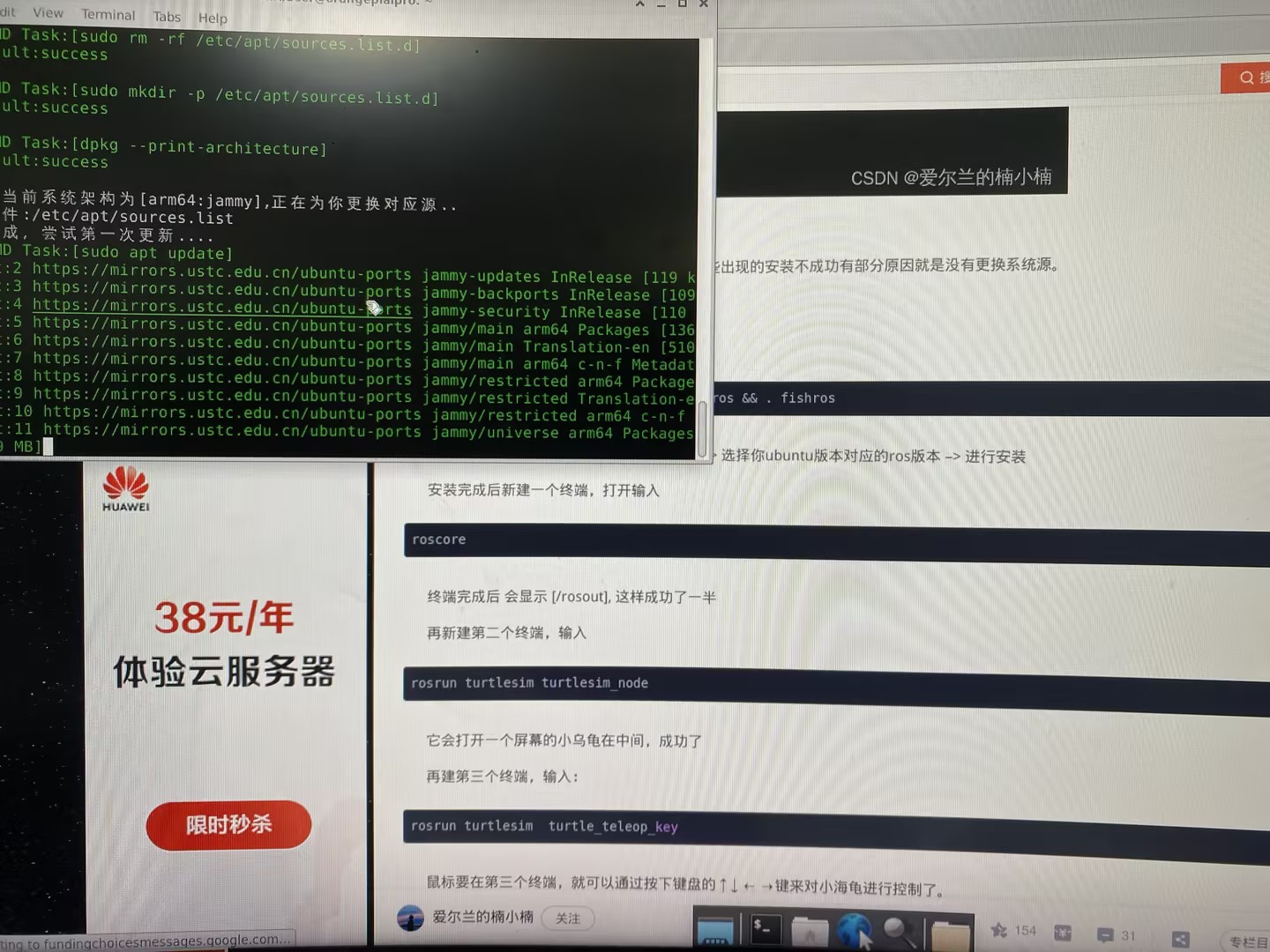
ROS2下载中…
下载完成!
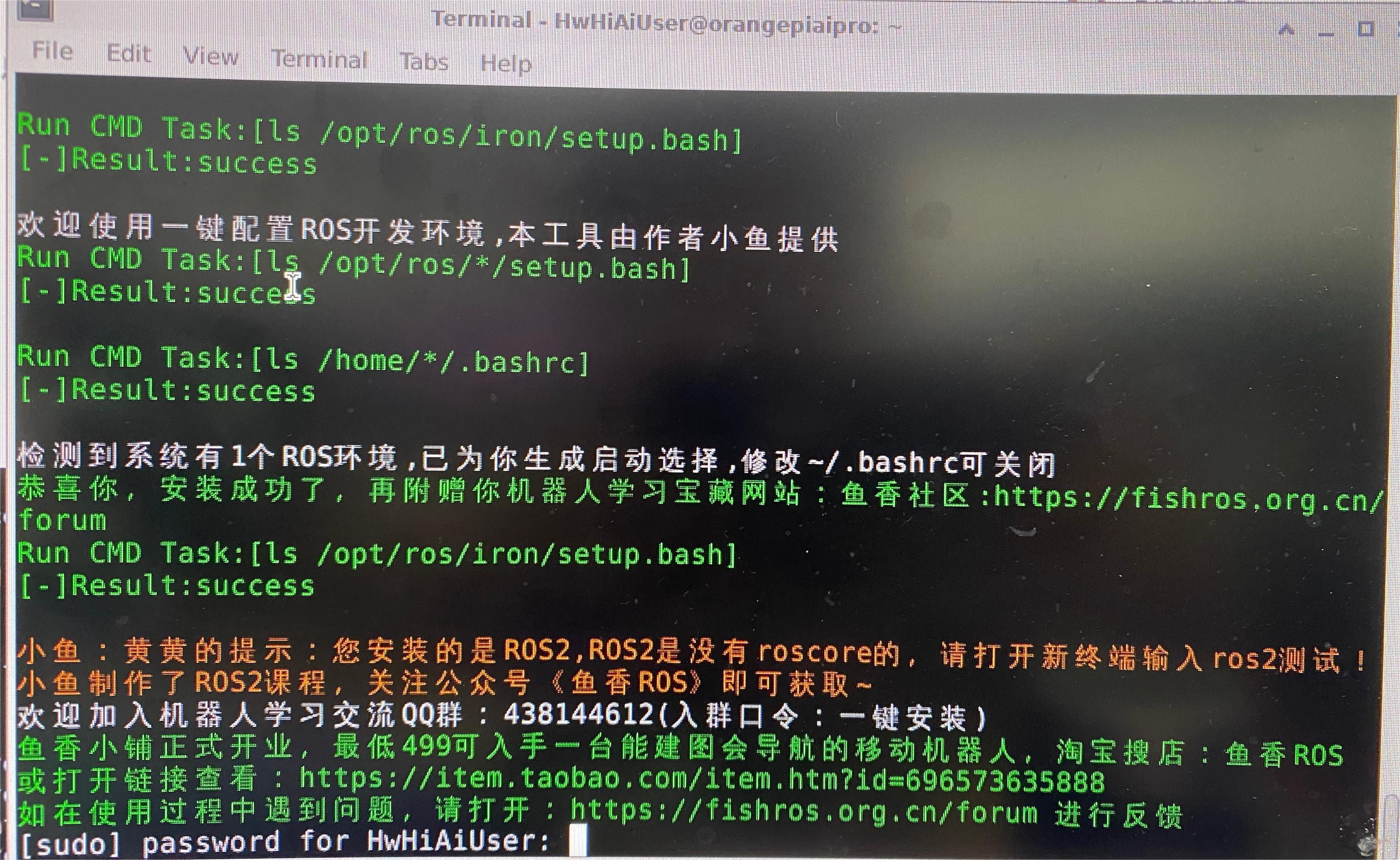
鱼香ROS一键安装非常方便,也不用手动安装或配置环境,选择版本安装完成后,就可以直接运行相关命令。
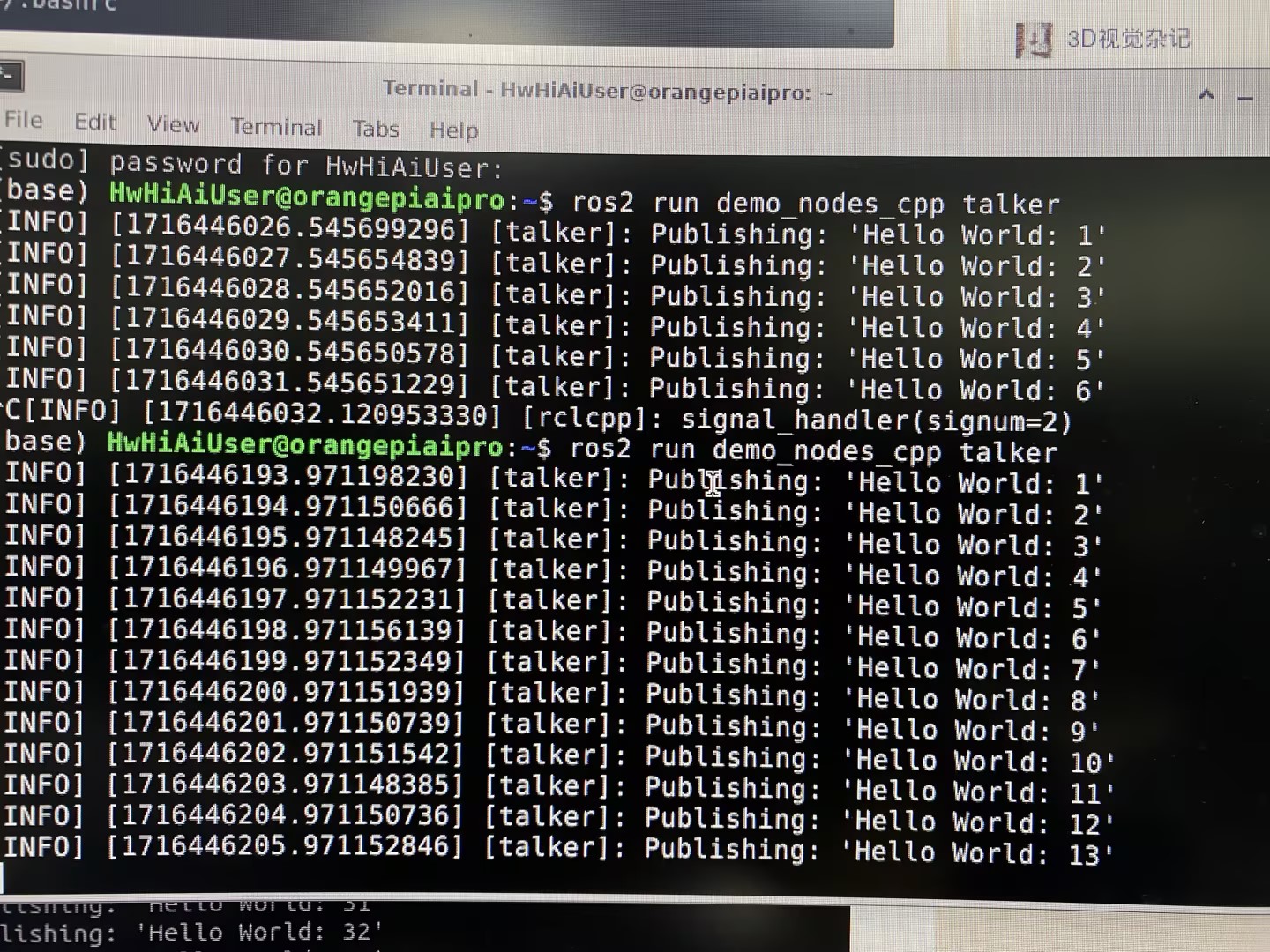
3. ROS节点测试
在安装好ROS2后,先运行一个talker测试demo,查看安装是否成功:
ros2 run demo_nodes_cpp talker
运行效果如下:
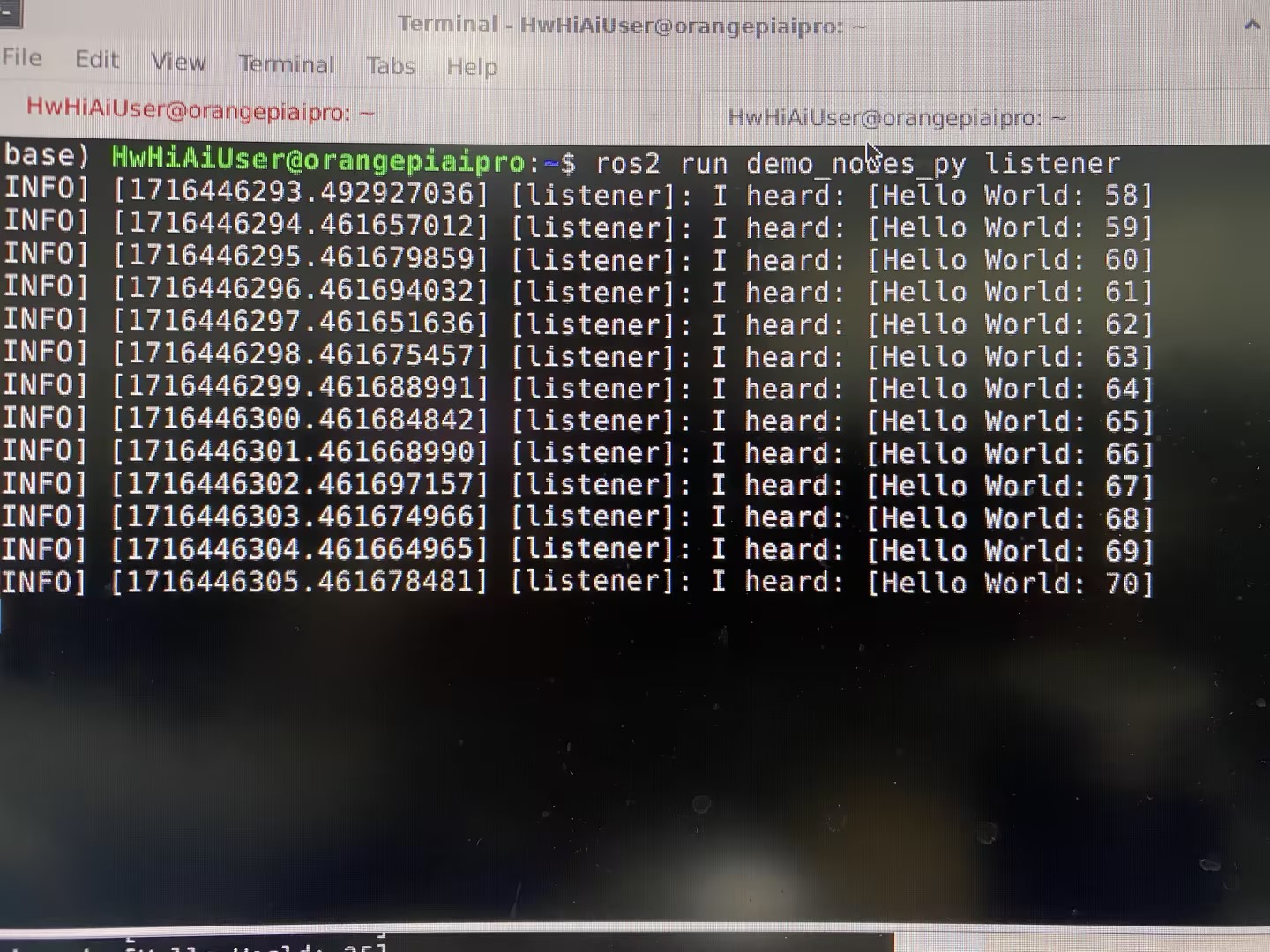
然后再运行一个listener,建立话题间通讯:
ros2 run demo_nodes_py listener
运行效果如下:
其他的一些常用工具都与ROS1一样,比如rqt话题显示和rostopic工具:
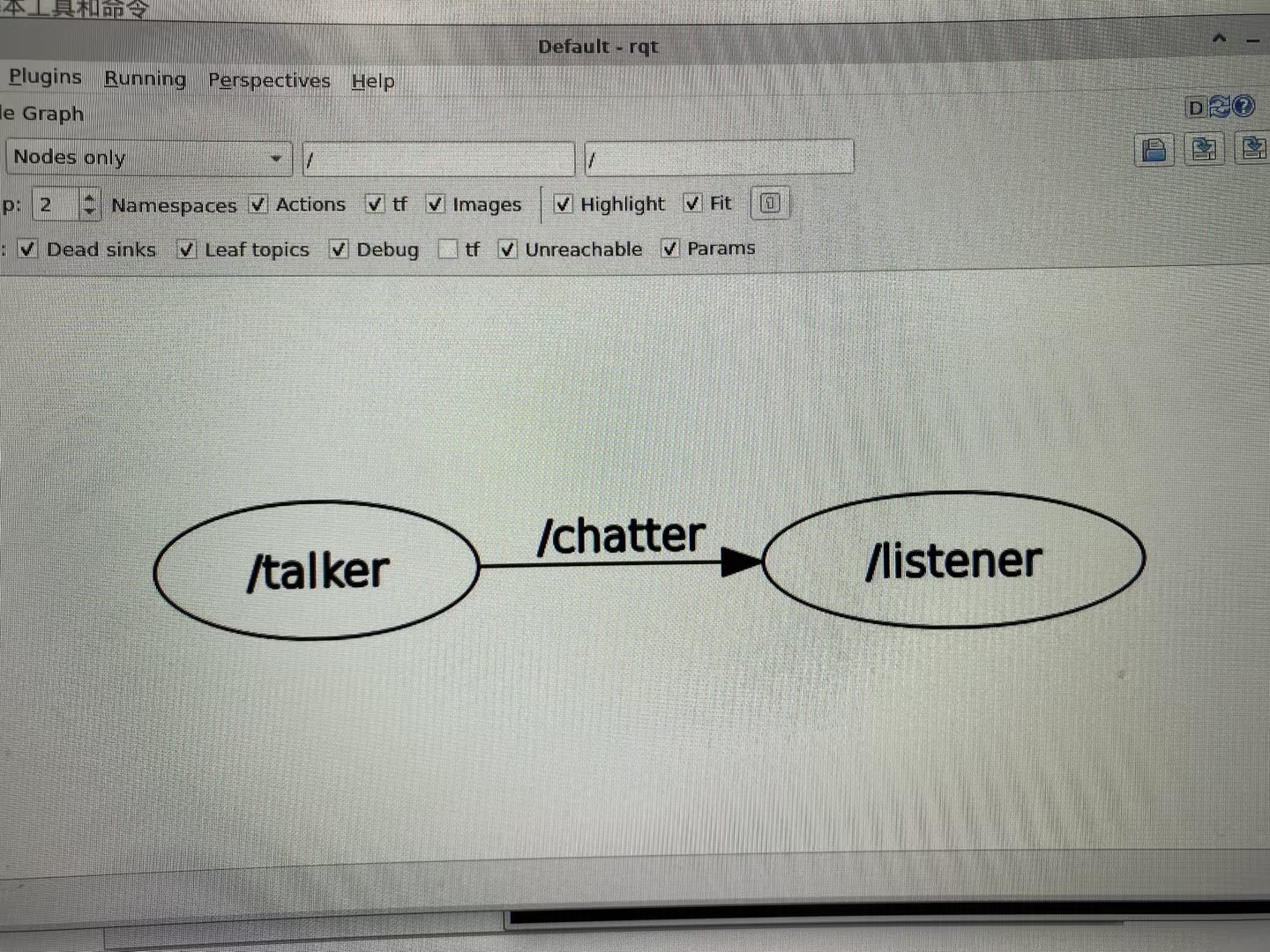
ros2 topic list
4. SLAM算法测试
SLAM算法测试才是真正能看出来香橙派 AI Pro开发板性能的硬指标,3D激光SLAM算法一帧点云就有数万甚至数十万的点,这对于开发板的性能和算力提出了严峻的挑战,在本次测试中,我运行A-LOAM算法,并在KITTI数据集中进行测试,使用Rviz可视化效果。
首先,安装Ceres1.14作为A-LOAM的依赖库,然后在ROS2环境下进行编译运行。
在Rviz中查看到雷达点云数据,效果图如下:

总体来说,跑算法还是很流畅的!
总结
本次测评就先到这里,香橙派 AI Pro开发板不仅包装和设计精致,其运行起来性能也非常流畅,界面具有高级感。其次,香橙派系列开发板的一大优势是其强大的社区支持和丰富的软件资源。香橙派 AI Pro 也不例外。无论是初学者还是有经验的专业人士,都能在社区中找到大量的教程、示例代码和活跃的技术讨论。这使得学习和使用香橙派 AI Pro 变得更加容易。
综上所述,香橙派 AI Pro 是一款外形精致、性能强大的开发板。无论是用于教育、研究还是工业应用,它都能提供稳定而高效的解决方案,非常适合于对嵌入式设备有严格限制的场景,可以满足基本任务需求。再加上其活跃的社区和丰富的软件资源,香橙派 AI Pro 无疑是开发者手中的一个强大工具。
下一步,我将尝试将香橙派 AI Pro部署到实验室的小车上进行进一步测试。