送给大家一句话:
今日的事情,尽心、尽意、尽力去做了,无论成绩如何,都应该高高兴兴地上床恬睡。 – 三毛 《亲爱的三毛》
🌃🌃🌃🌃🌃🌃🌃🌃🌃
🌏🌏🌏🌏🌏🌏🌏🌏🌏
从零开始map与set的封装
- 1 前言
- 2 红黑树的迭代器
- 3 map与set的封装
- 3.1 红黑树的改进
- 3.2 map的封装
- 3.3 set 的封装
- 4 总结
- Thanks♪(・ω・)ノ谢谢阅读!!!
- 下一篇文章见!!!
1 前言
为了map与set 的封装,我们进行了非常充足的知识储备!!!
首先,为了了解map 与 set 的底层原理我们开始学习二叉搜索树,二叉搜索树在二叉树的基础上增添了:
- 若它的左子树不为空,则左子树上所有节点的值都小于根节点的值
- 若它的右子树不为空,则右子树上所有节点的值都大于根节点的值
- 它的左右子树也分别为二叉搜索树
- 注意通常二叉搜索树不会有相同的键值
这样可以在一定程度上满足高效搜索的需求,但是在极端的情况(单子树情况)其效率会下降到O(n)。因此就有了改进的二叉搜索树:AVL树和红黑树。他们都增加一些特性使其最大程度上近似平衡二叉树!
AVL 树 和 红黑树 都是在保持二叉搜索树基本性质的基础上,通过旋转和重新平衡等操作,确保树的高度保持在一个相对平衡的状态,从而保证了操作的时间复杂度始终为 O(logn)。它们的出现大大提高了二叉搜索树在实际应用中的性能和稳定性。
AVL树增加了以下特性:
- 它的左右子树都是AVL树
- 左右子树高度之差(简称平衡因子)的绝对值不超过1(-1 / 0 / 1 )
在平衡因子超出要求就会进行旋转,旋转分为:右单旋 ,左单旋,左右双旋,右左双旋。
红黑树加入以下特性:
- ⚠️每个节点要么是红色,要么是黑色。
- ⚠️根节点必须是黑色的。
- ⚠️如果一个节点是红色的,则它的两个子节点必须是黑色的。
- ⚠️对于任意一个节点,从该节点到其所有后代叶子节点的简单路径上,必须包含相同数目的黑色节点。
- ⚠️每个叶子节点都是黑色的。这里的叶子节点指的是为空的节点。
在不满足规则时也会进行旋转。但是旋转的频率比AVL树要少很多,红黑树是只是接近平衡,AVL树几乎就是平衡的!
map与set大多数情况是用来检索的工具,我们底层使用红黑树来完成map与set的封装。
进行封装之前,我们先来实现一个非常重要的东西:迭代器
2 红黑树的迭代器
迭代器的好处是可以方便遍历。如果想要给红黑树增加迭代器,需要考虑以前问题:
- 迭代器的框架如何实现,才能满足泛型编程的需求??
- STL明确规定,begin()与end()代表的是一段前闭后开的区间,而对红黑树进行中序遍历后,可以得到一个有序的序列,因此:begin()可以放在红黑树中最小节点(即最左侧节点)的位置,end()放在最大节点(最右侧节点)的下一个位置,这里为了方便就给nullptr。
- operator++()与operator–()要如何实现?这里的++和–要满足中序遍历的顺序,就不能简单的进行指针的移动了!
接下来我们来逐个实现。
首先我们来搭建一下迭代器的框架
// 迭代器
//T 表示数据类型 Ref为引用 Ptr为指针
template<class T , class Ref , class Ptr>
struct _RBTreeIterator
{
//为了方便调用,我们重命名一下
typedef RBTreeNode<T> Node;
typedef _RBTreeIterator<T, Ref, Ptr> Self;
//内部是节点指针
Node* _node;
_RBTreeIterator(Node* node)
:_node(node)
{}
//两种指向方式
Ref operator*()
{
return _node->_data;
}
Ptr operator&()
{
return &_node->_data;
}
bool operator!= (const Self& s)
{
return _node != s._node;
}
};
接下来我们来实现++和–的操作。
中序遍历的顺序是先遍历左边再遍历当前节点最后是右子树。所以在跌迭代器指向当前节点的时候,说明当前节点的左子树已经遍历完了,如果++,就要去找右边的最左节点。如果没有右子树,说明该节点以下的部分已经遍历完了,接下来要去向上进行,找到是祖先左边的节点:
//迭代器的++ 中序遍历的顺序
Self& operator++()
{
//首先,能访问到当前节点说明左子树的都已经访问过啦
//所以就要分类讨论
//如果右边有子树,就要去寻找右子树的最左节点
if (_node->_right)
{
Node* cur = _node->_right;
while (cur->_left)
{
cur = cur->_left;
}
_node = cur;
}
//如果右边没有子树了,说明该节点以下的子树都已遍历完,那么就要向上进行
//找到祖先节点(注意祖先节点右边还没遍历)
//此时也要进行分类讨论
else
{
Node* cur = _node;
Node* parent = _node->_parent;
//_node == parent->_right
//说明parent的节点已经访问过了
while (parent && cur == parent->_right)
{
cur = parent;
parent = cur->_parent;
}
_node = parent;
}
return *this;
}
–与++完全相反。
这样红黑树的迭代器就成功设置好了,我们的红黑树更加完美了!!!
实现了迭代器接下来我们就来实现map与set的封装
3 map与set的封装
3.1 红黑树的改进
我们先来看我们写的红黑树的节点代码:
// 节点结构体
template<class K, class V>
struct RBTreeNode
{
RBTreeNode<K, V>* _left;
RBTreeNode<K, V>* _right;
RBTreeNode<K, V>* _parent;
pair<K, V> _kv;
color _col;
RBTreeNode(pair<K, V> kv)
:_left(nullptr),
_right(nullptr),
_parent(nullptr),
_kv(kv),
_col(Red)
{}
};
可以发现,这个节点的设置是写死的,里面的数据就设置为了pair<K , V>。如果我们想实现set的封装还要在写一份红黑树代码,因为set的节点数据是K 。这样就太不优雅了!
为了更好实现map与set的封装,我们来看STL源码里是如何实现的吧!
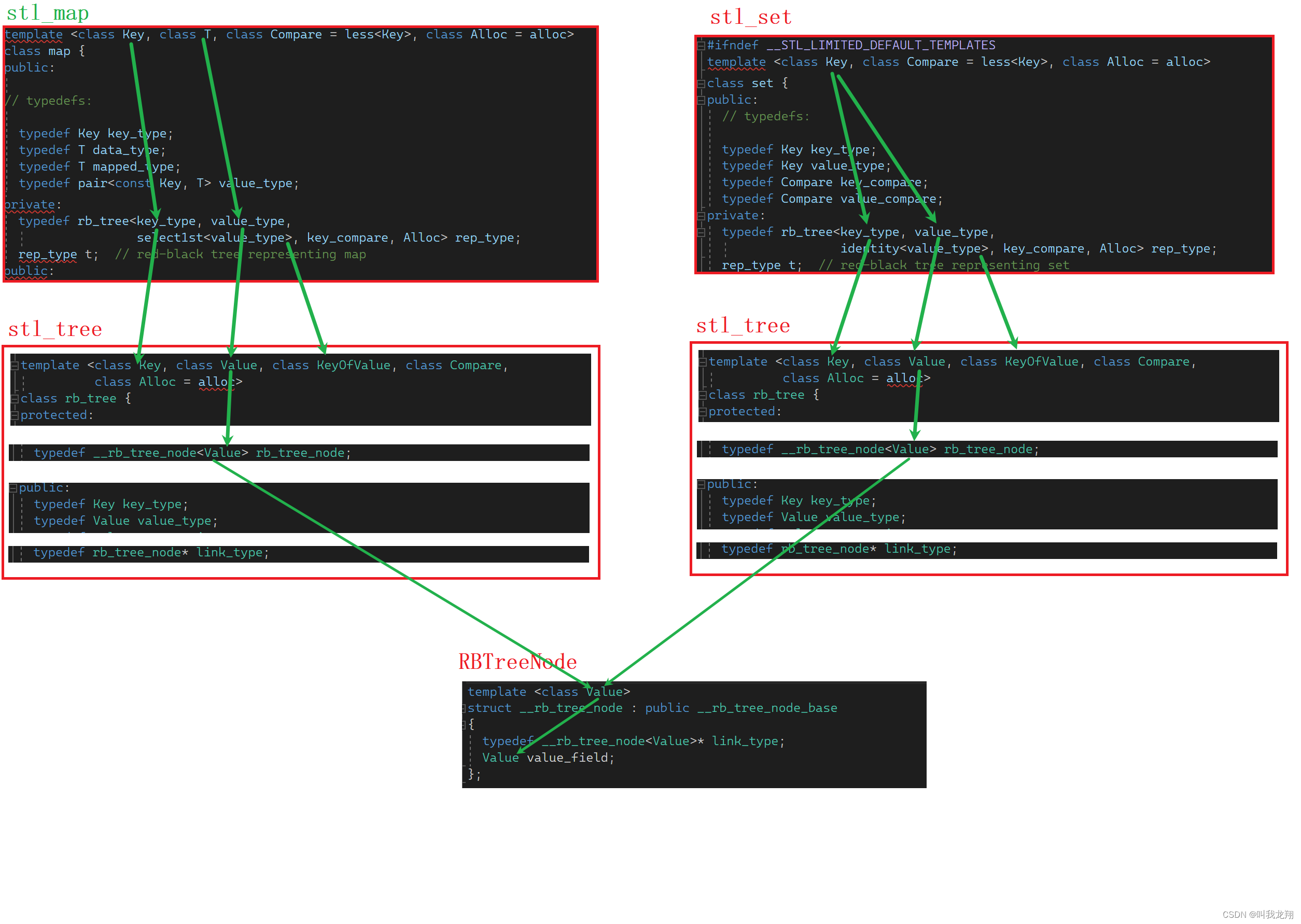
可以看到STL源码中使用了非常巧妙的模版来支持我们上层的map与set:
- 首先最底层的节点结构体只使用一个模版参数
value,用来表明储存什么数据类型,上层的红黑树通过什么value就使用使用什么 - 红黑树这层主要使用
Key Value KeyOfValue:- KEY:表示键值的类型,在Findj函数里有大用处(利用Key值来寻找是否存在)!!!
- Value:表示储存的数据类型
- KeyOfValue:这是一个仿函数,用来从Value取出Key值。
- map与set这层分别有
K V和K分别要提供给红黑树Key Value KeyOfValue:- map:就传给红黑树
<K , pair<K,V> ...> - set: 就传给红黑树
<K , K ...>
- map:就传给红黑树
这样实现了上层的map与set的模版参数并不一样,却可以使用同一个底层红黑树代码!!!十分巧妙!!!
我们按照源码改进我们的红黑树:
//-------------------------------------------
//---------------- 红黑树实现 -----------------
//-------------------------------------------
//-------- 适配map 与 set 的进阶版本 -----------
//-------------------------------------------
#include<utility>
enum color
{
Black,
Red
};
// 节点结构体
// T在这里是 pair<key , value>
template<class T>
struct RBTreeNode
{
RBTreeNode<T>* _left;
RBTreeNode<T>* _right;
RBTreeNode<T>* _parent;
T _data;
color _col;
RBTreeNode(T data)
:_left(nullptr),
_right(nullptr),
_parent(nullptr),
_data(data),
_col(Red)
{}
};
//适配map与set 的版本
// 迭代器
template<class T , class Ref , class Ptr>
struct _RBTreeIterator
{
typedef RBTreeNode<T> Node;
typedef _RBTreeIterator<T, Ref, Ptr> Self;
Node* _node;
_RBTreeIterator(Node* node)
:_node(node)
{}
Ref operator*()
{
return _node->_data;
}
Ptr operator&()
{
return &_node->_data;
}
bool operator!= (const Self& s)
{
return _node != s._node;
}
//迭代器的++ 中序遍历的顺序
Self& operator++()
{
}
Self& operator--()
{
}
};
//K 为键值 T 为储存的结构(pair<K ,V>) KeyOfValue 是取出Key的方式
template<class K, class T , class KeyOfValue>
class RBTree
{
public:
typedef _RBTreeIterator<T, T&, T*> Iterator;
typedef RBTreeNode<T> Node;
Iterator begin()
{
Node* cur = _root;
while (cur->_left)
{
cur = cur->_left;
}
return Iterator(cur);
}
Iterator end()
{
return Iterator(nullptr);
}
//右单旋
void RotateR(Node* parent)
{
}
//左右双旋
void RotateLR(Node* parent)
{
}
//右左双旋
void RotateRL(Node* parent)
{
}
//------------------
//返回需要比较的值
KeyOfValue kot;
//------------------
//插入函数
bool Insert(T data)
{
}
private:
void _IsBalance(Node* root , int num)
{
}
bool Check(Node* root, int blackNum, const int refNum)
{
}
void _InOrder(Node* cur)
{
}
RBTreeNode<T>* _root = nullptr;
};
注意插入函数等里面的比较方式统一改成类似kot(data) < kot(node.data)的样子哦!!!因为map与set的取出key的方式不同!!!
3.2 map的封装
实现了红黑树的改进,接下来就简单了!
在上层操作我们只需要调用对应的底层代码,给予对应的模版参数就好了!!!
- map 要满足
K V的模版参数的传入 - map 要实现一个仿函数用来取出Key
- map 类里要有一个底层红黑树类,传入对应的模版参数
<K , pair<const K , V> , MapOfValue>(注意键值不可更改哦,所以使用pair<const K , V>) - map 类里要实例化一个迭代器。只需要提供基本的begin()与end()接口(直接调用红黑树的就可以),剩下
++ -- !+交给迭代器操作交给红黑树的迭代器。
//----------------------------------
//---------- MAP 的实现 -----------
//----------------------------------
#include"RBTree.h"
#include<utility>
//层层递进,
//map 上层要提供 key value 键值对
//相应的要改造红黑树的代码 使其满足泛型编程
template<class K , class V>
class map
{
struct MapOfValue
{
const K& operator()(const pair<const K, V>& kv)
{
return kv.first;
}
};
public:
typedef typename RBTree<K, pair<const K, V>, MapOfValue>::Iterator iterator;
iterator begin()
{
return _t.begin();
}
iterator end()
{
return _t.end();
}
bool Insert(pair<const K, V> kv)
{
return _t.Insert(kv);
}
void InOrder()
{
_t.InOrder();
}
private:
//底层是红黑树
//需要提供对应的键值 储存结构 比较方式
RBTree<K, pair<const K, V>, MapOfValue > _t;
};
这样就实现了map 的封装!!!
3.3 set 的封装
在上层操作我们只需要调用对应的底层代码,给予对应的模版参数就好了!!!
- set 要满足
K的模版参数的传入 - set 要实现一个仿函数用来取出Key
- set 类里要有一个底层红黑树类,传入对应的模版参数
<K , const K , MapOfValue>(注意键值不可更改哦,所以使用 const K ) - set 类里要实例化一个迭代器。只需要提供基本的begin()与end()接口(直接调用红黑树的就可以),剩下
++ -- !+交给迭代器操作交给红黑树的迭代器。
//----------------------------------
//---------- SET 的实现 -----------
//----------------------------------
#include"RBTree.h"
#include<utility>
//层层递进,
//set 上层要提供 key 键值
//相应的要改造红黑树的代码 使其满足泛型编程
template<class K>
class set
{
struct SetOfValue
{
const K& operator()(const K& k)
{
return k;
}
};
public:
typedef typename RBTree<K, const K, SetOfValue>::Iterator iterator;
iterator begin()
{
return _t.begin();
}
iterator end()
{
return _t.end();
}
bool Insert(K kv)
{
return _t.Insert(kv);
}
void InOrder()
{
_t.InOrder();
}
private:
//底层是红黑树
//需要提供对应的键值 储存结构 比较方式
RBTree<K, K, SetOfValue > _t;
};
这样就实现了set的封装!!!
4 总结
通过近一周的学习,我们终于将map和set从零建立起来了,这里不仅需要二叉搜索树的知识还需要AVL树和红黑树的使用!!!甚至还需要对于模版的更深理解!!!
我们写完了发现上层的map和set并没有使用多少代码,大部分是调用底层的代码,所以只有根基稳固才能走到更远!!!
map和set的封装是很值得回味的内容!!!