机器人控制系统本质上是一个非线性系统。引起机器人非线性因素很多,机器人的结构、传动件、驱动元件等都会引起系统的非线性。
机器人控制系统是由多关节组成的一个多变量控制系统,且各关节间具有耦合作用。具体表现为某一个关节的运动,会对其他关节产生动力效应,每一个关节都要受到其他关节运动所产生的扰动。因此工业机器人的控制中经常使用前馈、补偿、解耦和自适应等复杂控制技术。
机器人系统是一个时变系统,其动力学参数随着关节运动位置的变化而变化。
一、基本概念
- 非线性系统:与线性系统不同,非线性系统的输出与输入之间的关系不是简单的比例关系,而是更为复杂的函数关系。这种复杂性使得非线性系统的分析和控制更具挑战性。
- 机器人非线性控制系统:由于机器人系统的复杂性和多变性,其控制问题往往呈现非线性特性。因此,需要采用非线性控制理论和方法来解决机器人的控制问题。
二、系统特性
- 多变量性:机器人系统通常包含多个变量,如位置、速度、加速度等,这些变量之间可能存在耦合关系,使得系统的控制更为复杂。
- 时变性:机器人系统的参数和特性可能随时间变化,如机器人的质量、惯性、阻尼等参数可能会受到负载、磨损等因素的影响而发生变化。这种时变性使得系统的控制更加困难。
- 约束性:机器人系统的运动受到各种约束条件的限制,如关节角度限制、速度限制、加速度限制等。这些约束条件需要在控制系统设计中得到充分考虑。
三、控制方法
- 非线性控制方法:包括反馈控制、前馈控制、自适应控制、鲁棒控制等多种方法。这些方法可以根据系统的特性和控制需求进行选择和组合,以实现有效的控制效果。
- 阻抗控制:阻抗控制是一种将机器人与环境接触作业的动力学模型修改为期望阻抗(弹簧-质量-阻尼)模型的控制策略。通过调节惯性、阻尼、刚度参数来实现调整机器人末端位置与接触力的关系,从而控制机器人运动与外力之间的动态关系。
- 非线性动力学模型:为了准确描述机器人系统的非线性行为,需要建立非线性动力学模型。该模型应能够反映机器人的质量、惯性、刚度、阻尼等特性,以及这些特性如何随时间和外部条件的变化而变化。



参考文献:
机器人控制系统的基本单元与机器人控制系统的特点分析-电子发烧友网机器人控制系统的基本单元包括: 1、控制计算机:控制系统的调度指挥中心机构。2、示教盒:示教机器人的工作轨迹和参数设定,以及所有人机交互操作,拥有自己独立的CPU以及存储单元,与主计算机之间以串行通信方式实现信息交互。3、操作面板: 由各种操作按键、状态指示灯构成,只完成基本功能操作。4、硬盘和软盘存储存:储机器人工作程序的外围存储器。5、数字和模拟量输入输出:各种状态和控制命令的输入或输出。6、打印机接口:记录需要输出的各种信息。7、传感器接口:用于信息的自动检测,实现机器人柔顺控制,一般为力觉、触觉和视觉传感器。8、轴控制器:完成机器人各关节位置、速度和加速度控制。9、辅助设备控制:用于和机器人配合的辅助设备控制,如手爪变位器等![]() https://www.elecfans.com/d/712935.html
https://www.elecfans.com/d/712935.html
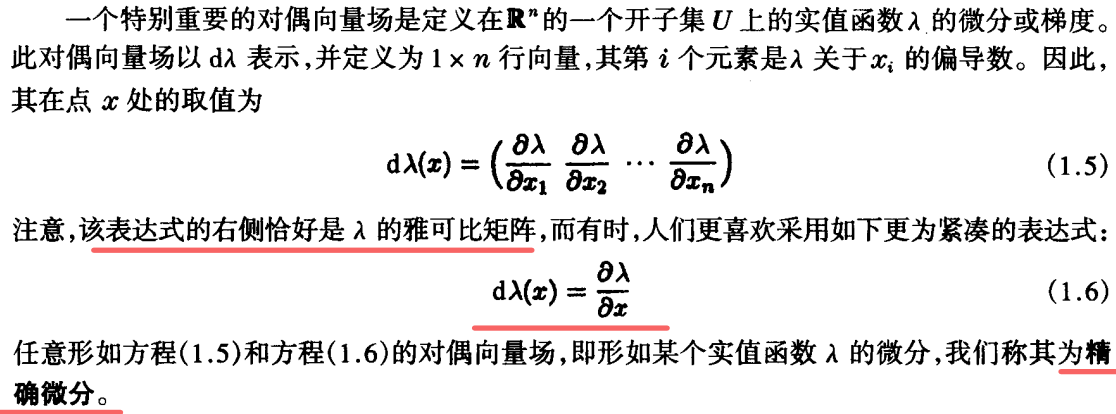
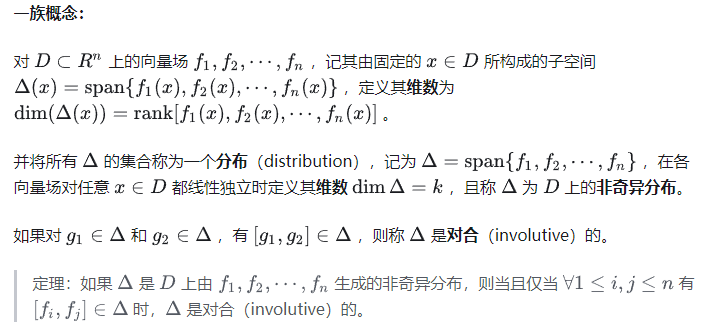
非线性系统控制:13 Feedback Linearization - 知乎在上一章(Chapter 12 Feedback Control)中,我们已经介绍了一种对通过线性化来对非线性系统进行控制的方法。但我们同时也注意到,那时的线性化是通过在平衡点微分来实现的,因此可以认为是一类“不精确的”而且…![]() https://zhuanlan.zhihu.com/p/464507916
https://zhuanlan.zhihu.com/p/464507916