第二章











































第三章







 .
.



































第四章



























































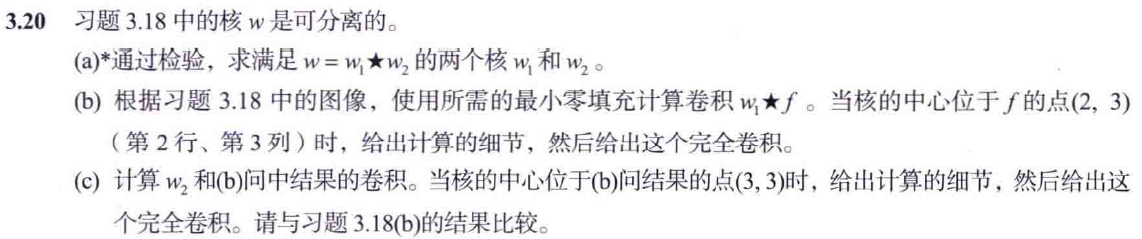
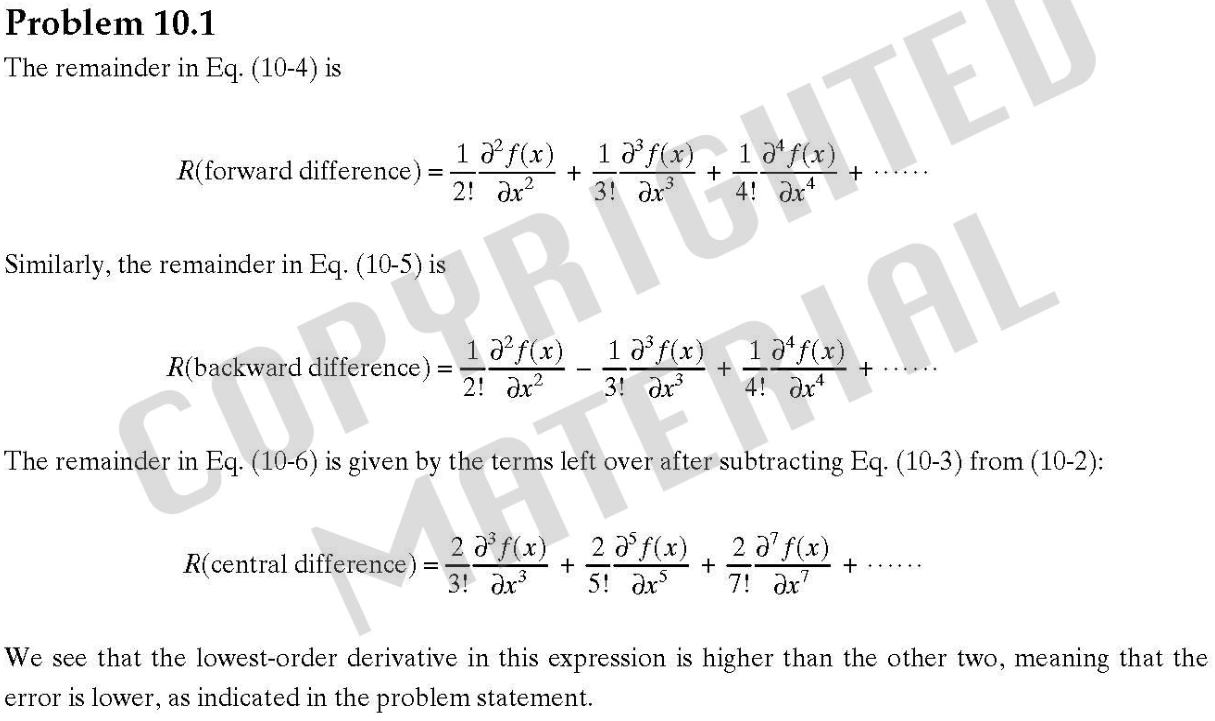
傅里叶变换是一个线性过程,而计算梯度的平方根和平方根则是非线性运算。傅里叶变换可以用来计算微分的差值(如问题4.50),但必须在空间域中直接计算平方和平方根值。


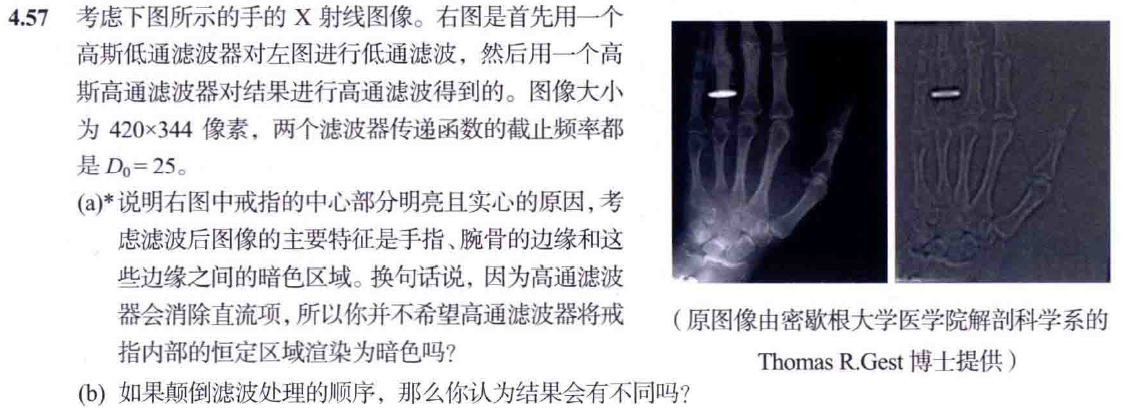
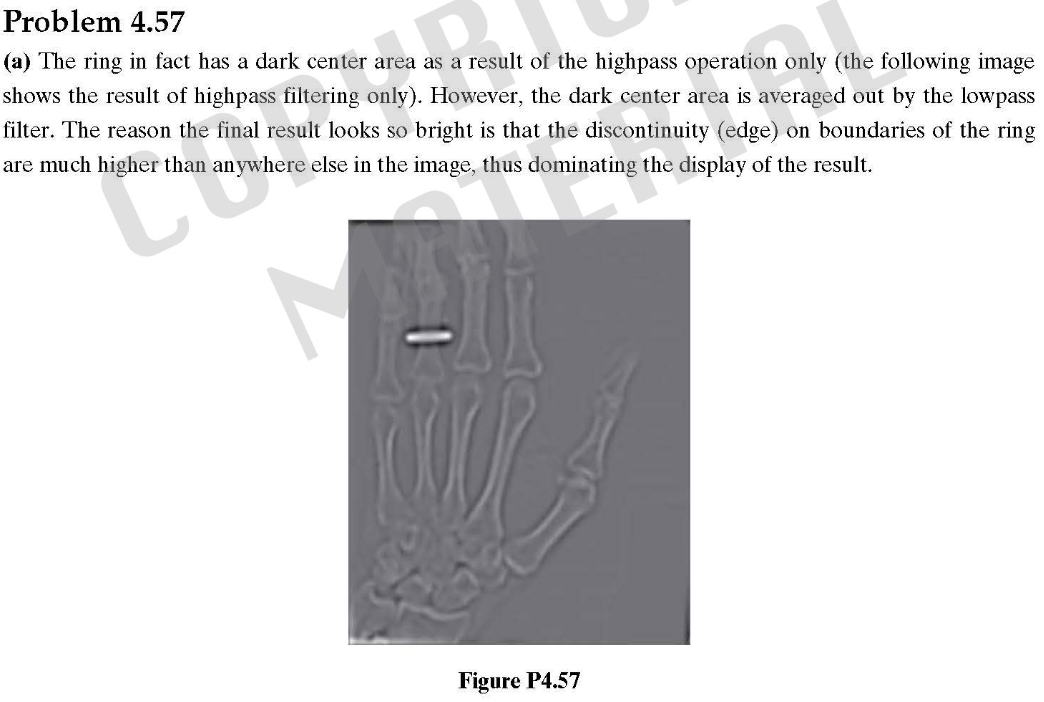
(a)实际上,由于高通操作,环有一个暗中心区域(以下图像仅显示高通滤波的结果),而暗中心区域由低通滤波器平均。最终结果看起来如此明亮的原因是,环形边界上的不连续性(边缘)比图像中的任何地方都要高得多,从而控制了结果的显示。




第五章
















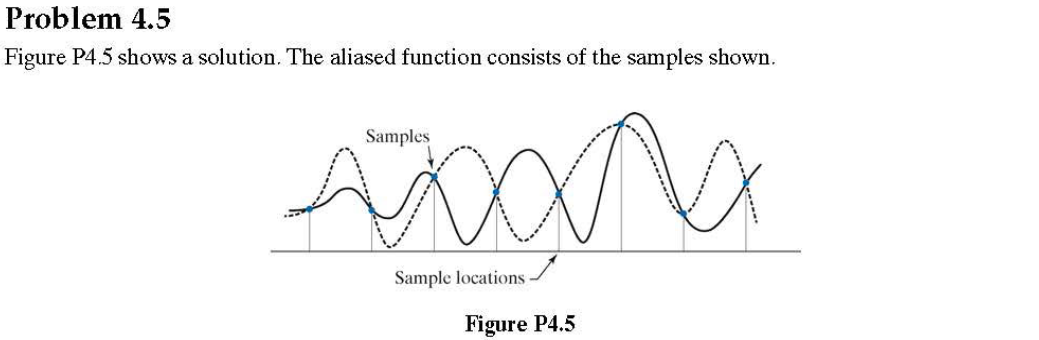
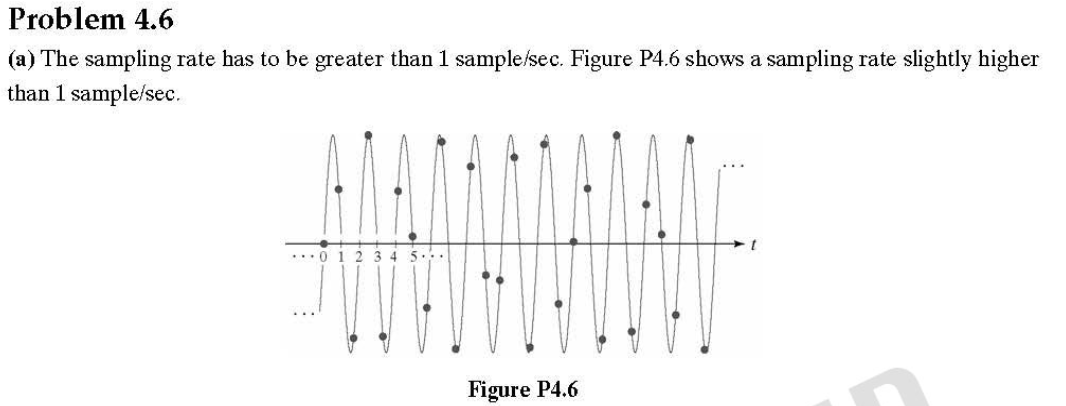
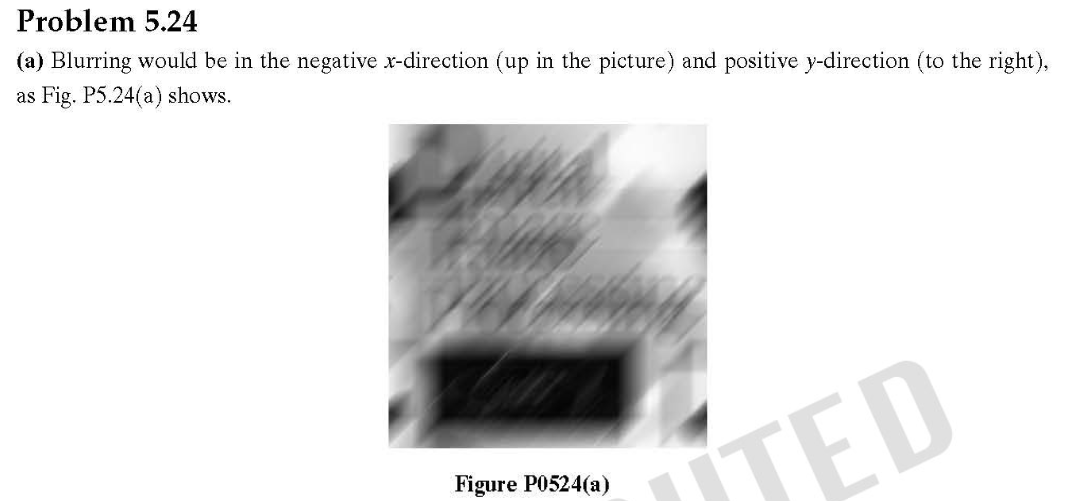
(a) 图为正弦波完整周期的整数。
(b) 位于
u
0
u_0
u0和
−
u
0
-u_0
−u0处的一对纯共轭脉冲。





















解决方案如图5.41所示。要了解为什么包含中心单点的图像的 Radon 变换是一条直线请参阅图 5.36、5.37 和方程 (5-101),这个方程告诉我们这个方程告诉我们,对于每个角度 θ,我们通过改变 ρ 来计算 Radon 变换,以找到沿线
L
(
θ
,
ρ
)
L(θ,ρ)
L(θ,ρ) 在图像上的总和。但是,对于给定的图像和任意角度 θ,唯一包含单个点的线是
ρ
=
2
M
/
2
ρ=\sqrt{2}M/2
ρ=2M/2(该点位于正方形图像对角线的一半)的线。此外,θ 的任何值的总和将等于点的强度。因此,Radon变换将是位于
ρ
=
2
M
/
2
ρ=\sqrt{2}M/2
ρ=2M/2 处的恒定强度直线的图像,如图所示。









第六章


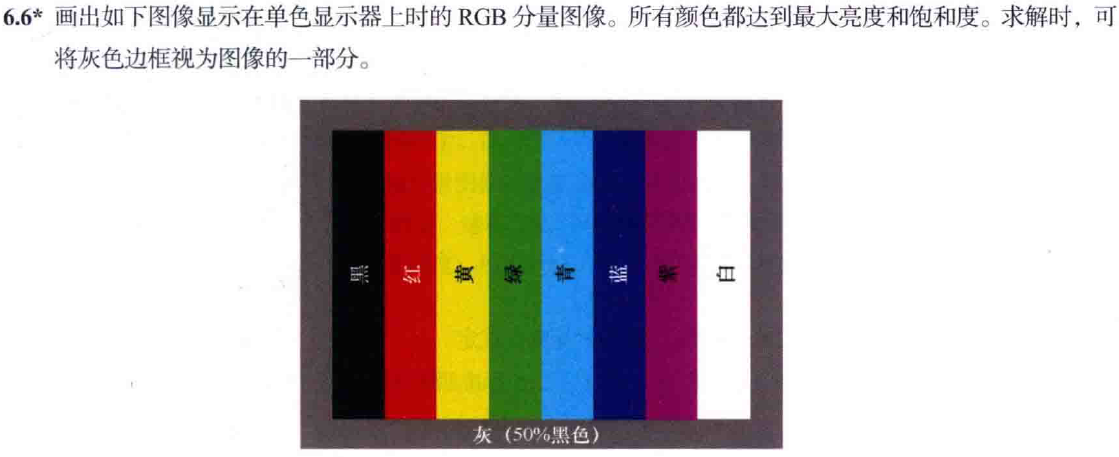
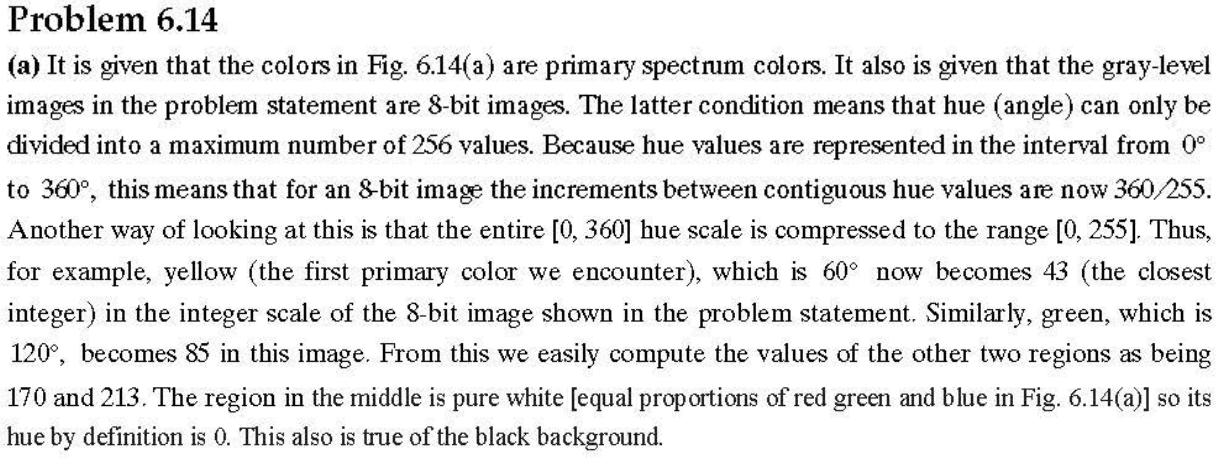
使用根据三个对象颜色的波长进行调谐的滤色器。使用特定滤波器后,只有颜色与该波长相对应的物体才会在单色相机上产生显着响应。电动滤波器转轮可用于通过计算机控制滤波器位置。如果其中一种颜色是白色,那么三个滤波器的响应将大致相等且高。如果其中一种颜色是黑色,则三个滤波器的响应将大致相等且较低。




















饱和度图像是恒定的,因此平滑它将产生相同的常数值。



第七章


















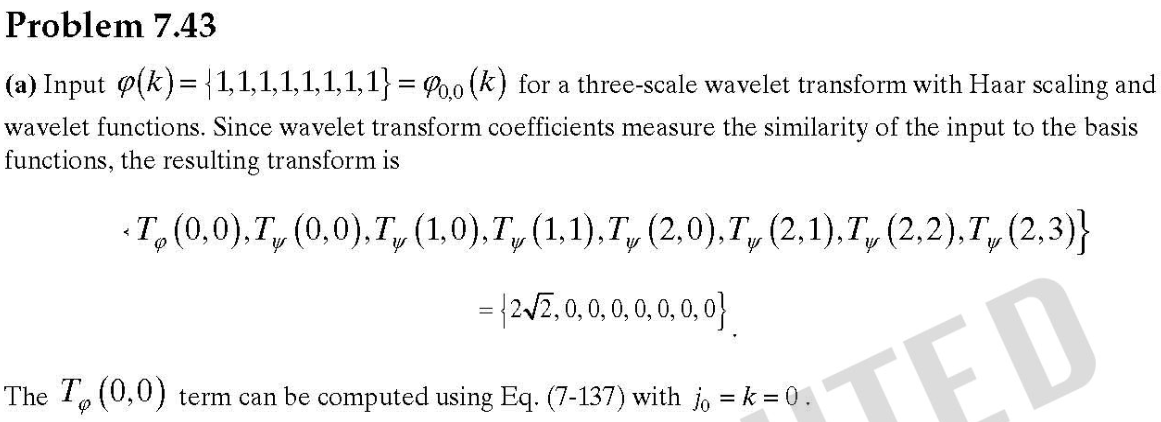
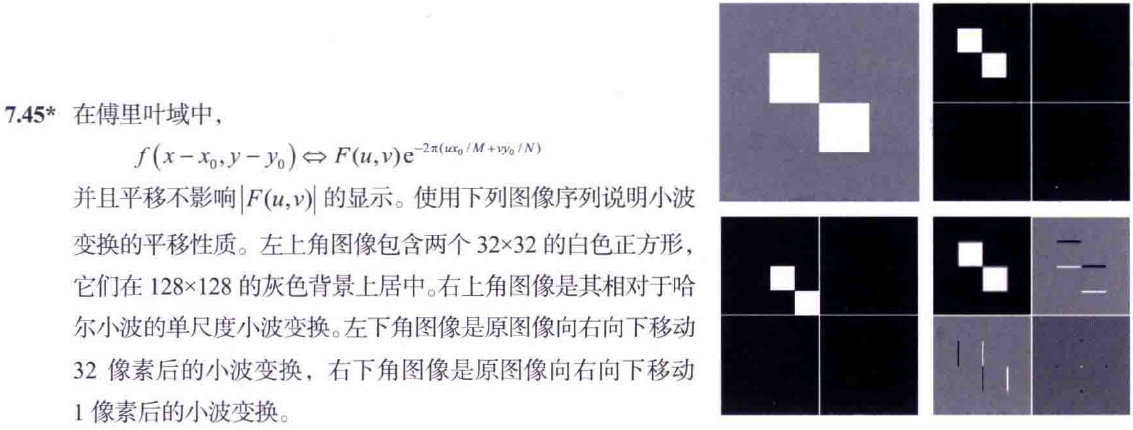
7.40没有



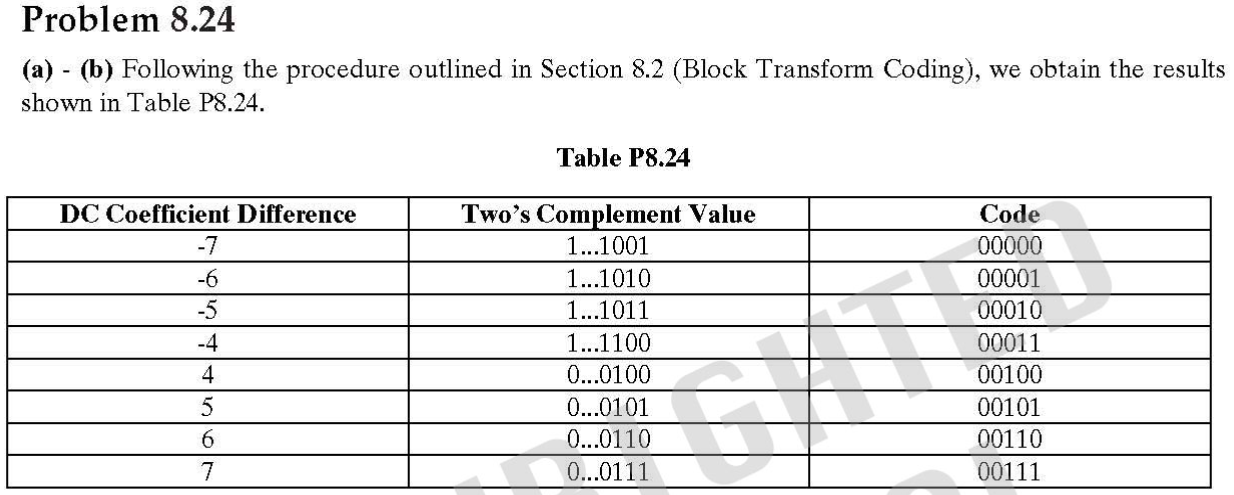
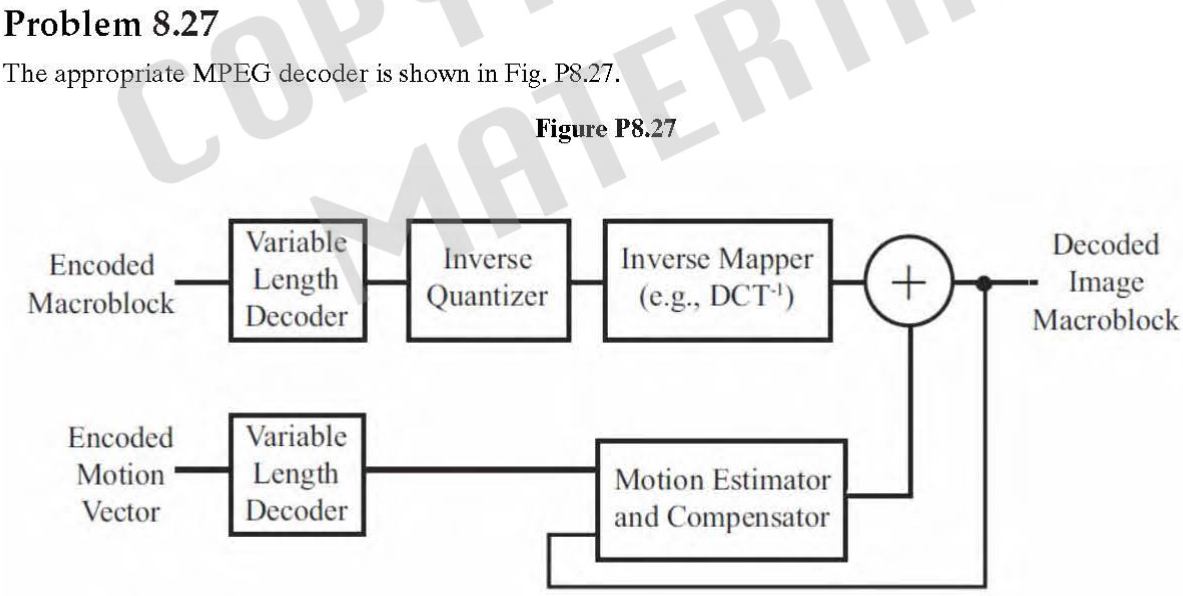
第八章















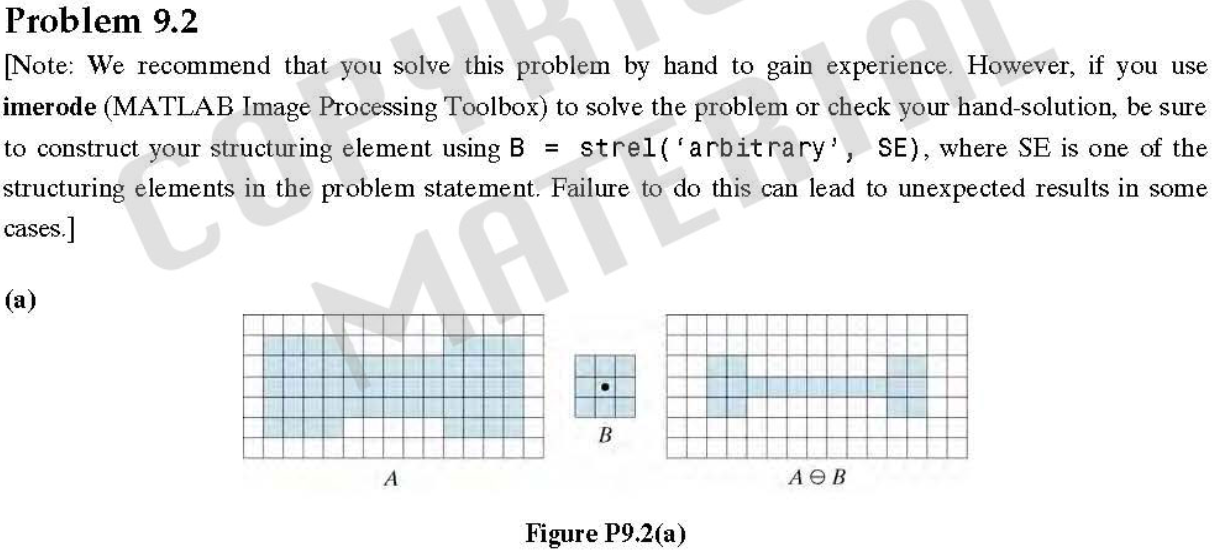
第九章



































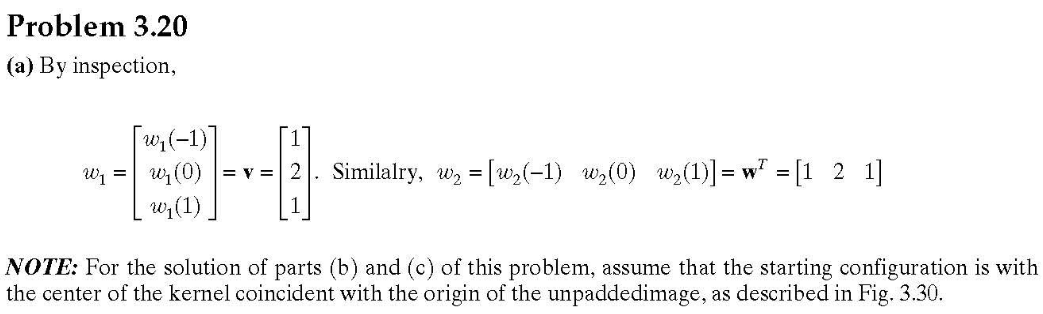
A4-连通曲线不能有对角线连接,因此算法只需检查输入图像中的对角线项,从3×3邻域的中心点到曲线的下一个点。对于所发现的这些像素,在中心像素的左侧(或右侧)添加一个1,同时考虑到从中心像素到下一个像素的移动方向。然后,鉴于这条曲线只有一个像素宽,没有分支,我们只需要检查下图第一行的可能性(以所示方式标记邻域的原因很快就会清楚):
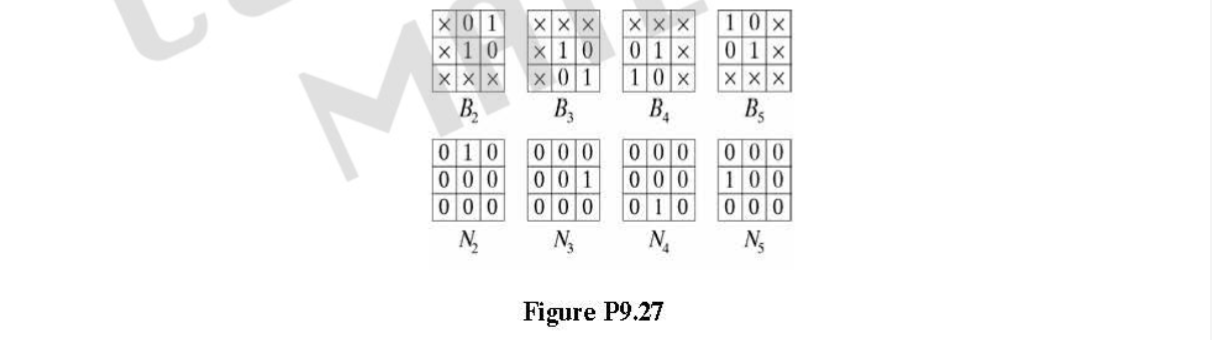
图P9.27第一行中显示的结构元素考虑到了这样一个事实,即我们只需要在行进方向上查看每个像素前面的一个像素,并确保访问到所有点。因为我们只看前面的一个像素,所以我们必须保证对角线每边的像素是 0;其他的无关紧要,因此不关心条件。
该算法由以下几个主要阶段组成。
1)使用问题图第一行中的每个结构元,将击中-击不中变换应用于包含曲线的图像,一次应用一个。用 2 标记 B 2 B_2 B2 找到的命中,用 3 标记 B 3 B_3 B3 找到的命中,依此类推。
2)对于标记为2的每一个点,在图P9.27的第二行,用 N 2 N_2 N2执行其3×3邻域的逻辑OR运算(这会在将对角线连接转换为 4 连接所需的位置添加一个 1),对其他3种类型的命中重复上述步骤。

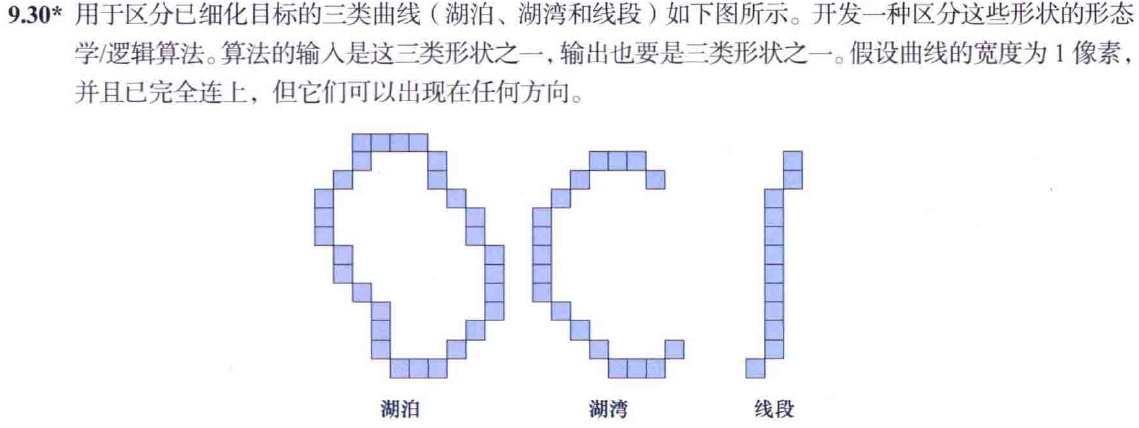
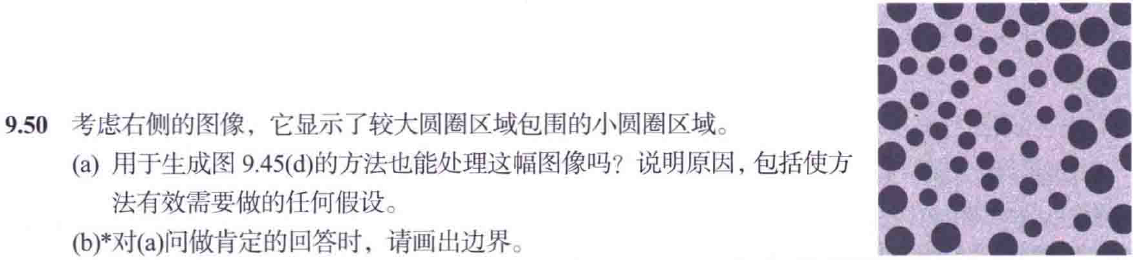
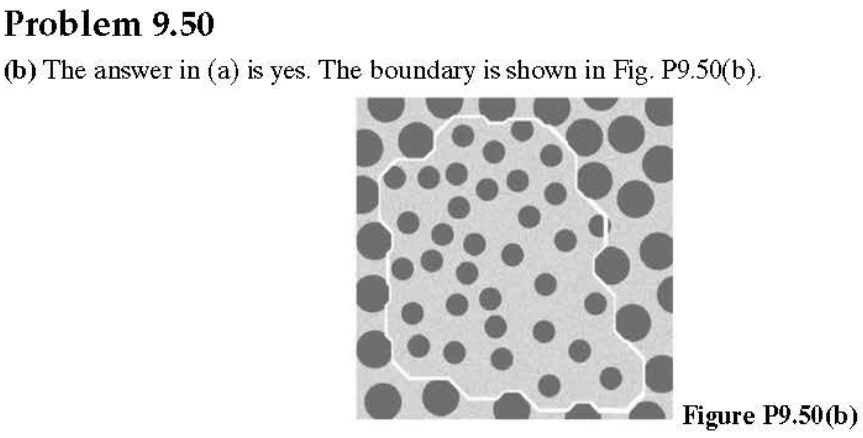
湖泊与其他两个特征之间的主要区别在于前者形成一个封闭的轮廓。假设一次处理一个形状,则区分三个形状的基本两步法如下:
步骤 1。将端点检测器应用于对象。如果未找到端点,则对象是湖,否则就是海湾或线。
步骤 2。有很多方法来区分海湾和直线。最简单的方法之一是确定一条连接对象的两个端点的线,如果对象与这条线只有端点处的两个交点,那么这个图形就是海湾,否则它就是一条直线。在一些反常情况下,这种检测会失效,并且需要在这个过程中建立额外的“信息”,但随着细化图形分辨率的增加,这些反常情况的可能性会降低。























(a) Color the image border pixels the same color as the particles (white). Call the resulting set of border pixels β. Apply the connected component algorithm (Section 9.6). All connected components that contain elements from β are particles that have merged with the border of the image.
(a)将图像边框像素着色为与颗粒相同的颜色(白色)。调用生成的边框像素集 β。应用连接组件算法(第 9.6 节)。包含来自 β 的元素的所有连接成分都是与图像边框接触的颗粒。

第十章















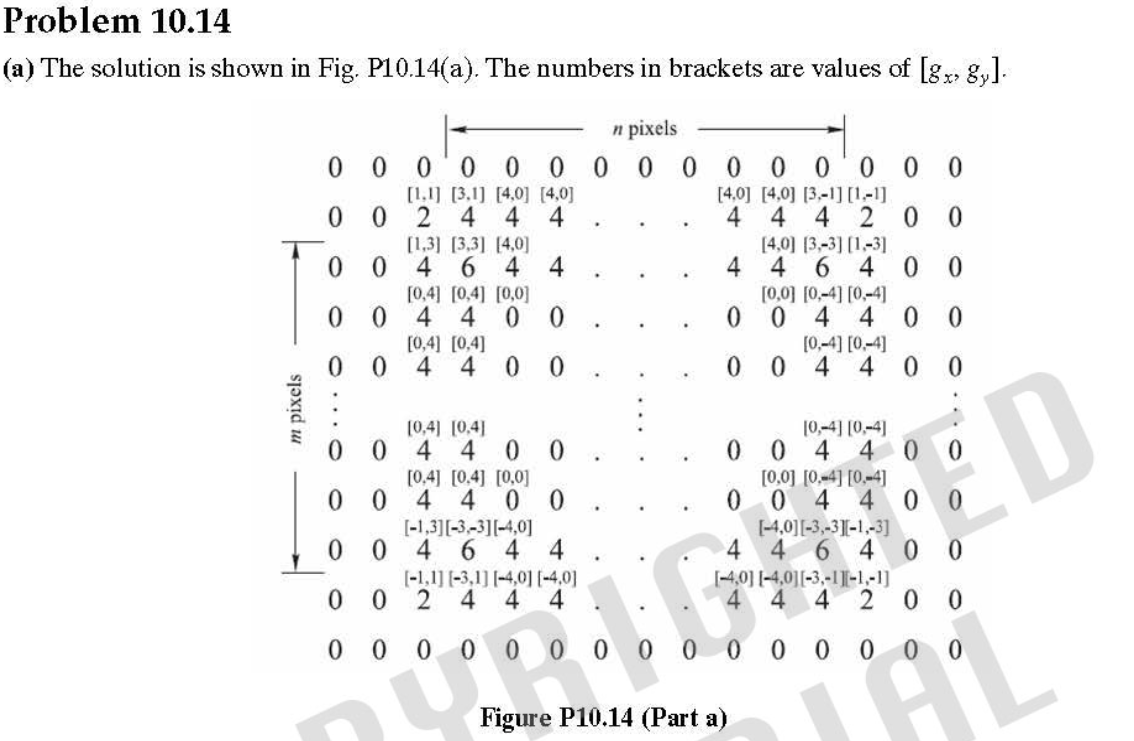









(b)直接实现二维空间卷积需要在
f
(
x
,
y
)
f(x,y)
f(x,y)的每个位置进行
n
2
次
n^2次
n2次乘法,因此乘法的总数为
n
2
×
M
×
N
n^2×M×N
n2×M×N。另一方面,在图像中每一行的每个位置,一维卷积都需要
n
n
n次乘法,对于所有行的传递,总共需要
n
×
M
×
N
n×M×N
n×M×N次乘法。然后,所有列的传递都需要
n
×
M
×
N
n×M×N
n×M×N次,总共有
2
n
M
N
2nMN
2nMN次乘法。计算优势
A
A
A是

这与图像大小无关。例如,如果
n
=
25
,
A
=
12.5
n= 25,A=12.5
n=25,A=12.5,那么直接实现二维卷积所需的乘法次数是实现一维卷积的
12.5
12.5
12.5 倍。这与方程(3-44)当
m
=
n
m=n
m=n时一致。当然,乘法的数量本身很大程度上取决于图像大小。





















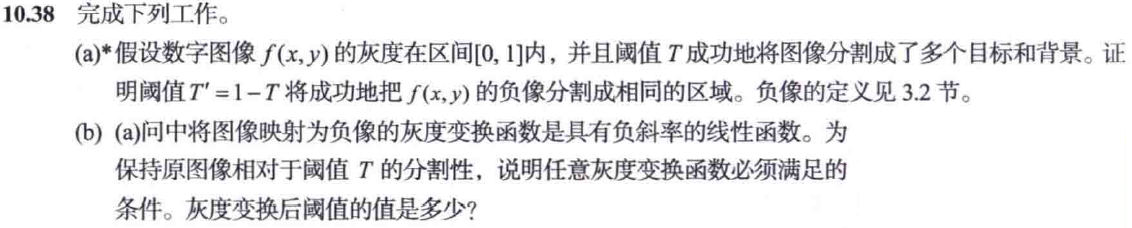
(a)设
R
1
R_1
R1和
R
2
R_2
R2,分别表示像素强度大于
T
T
T和小于或等于
T
T
T的区域,阈值
T
T
T是强度值,由变换函数映射到值
T
′
=
1
−
T
T'=1-T
T′=1−T。
R
1
R_1
R1中的值被映射到
R
1
′
R_1'
R1′,
R
2
R_2
R2中的值被映射到
R
2
′
R_2'
R2′。重要的是,
R
′
R'
R′中的所有值都在
T
′
T'
T′下,且
R
2
′
R_2'
R2′中的所有值都等于或大于
T
′
T'
T′。不等式的意义已被逆转,但这两个区域的强度的可分性得到了保持。





【没写图割】







(a) 给定水平方向上 10% 的图像区域被 2.5 厘米长的子弹占据。由于成像设备是方形的(256 × 256 个像素),因此假设没有光学畸变,相机会观察 25 厘米×25 厘米的区域。因此,像素之间的距离为 25 / 256 = 0.098 25/256 =0.098 25/256=0.098 厘米/像素。子弹的最大速度为 1000 1000 1000 米/秒 = 100 , 000 100,000 100,000 厘米/秒。在这个速度下,子弹将行进 100 , 000 / 0.98 = 1.02 × 1 0 6 100,000/0.98 = 1.02× 10^6 100,000/0.98=1.02×106像素/秒。要求子弹在曝光期间的行进不超过一个像素。即 ( 1.02 × 1 0 6 1.02×10^6 1.02×106 像素/秒)× K K K 秒 ≤ 1 ≤1 ≤1 像素。所以, K ≤ 9.8 × 1 0 − 7 K ≤ 9.8×10^{-7} K≤9.8×10−7 秒。
© 在有反光物体的闪烁情况下,图像往往会变暗,物体会发光。那么,第 10.8 节中讨论的空间技术就足够了。

第十一章





















































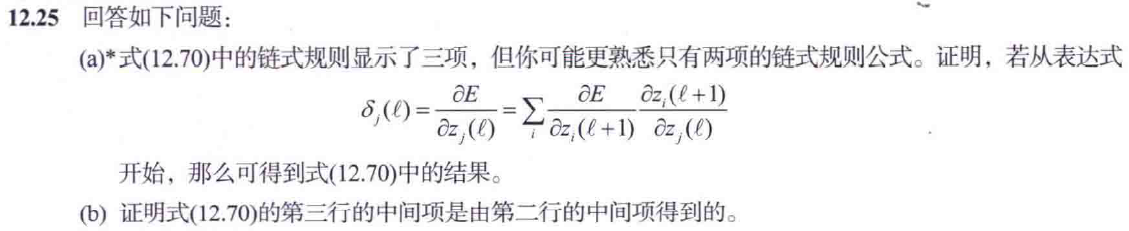
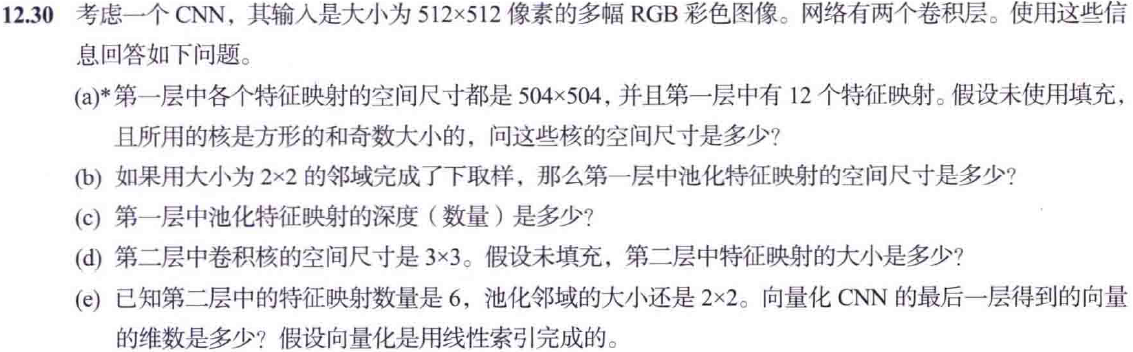
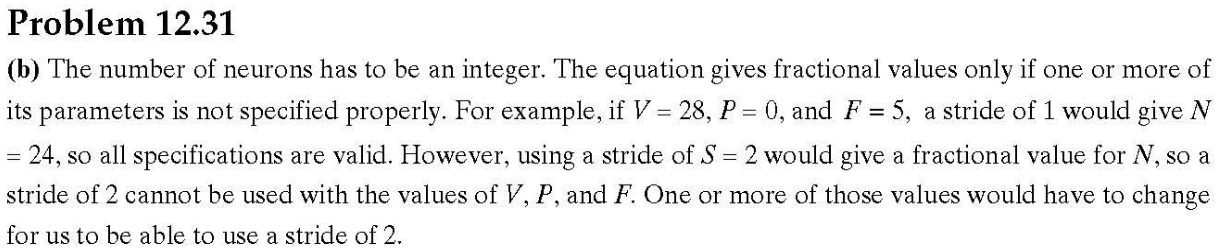
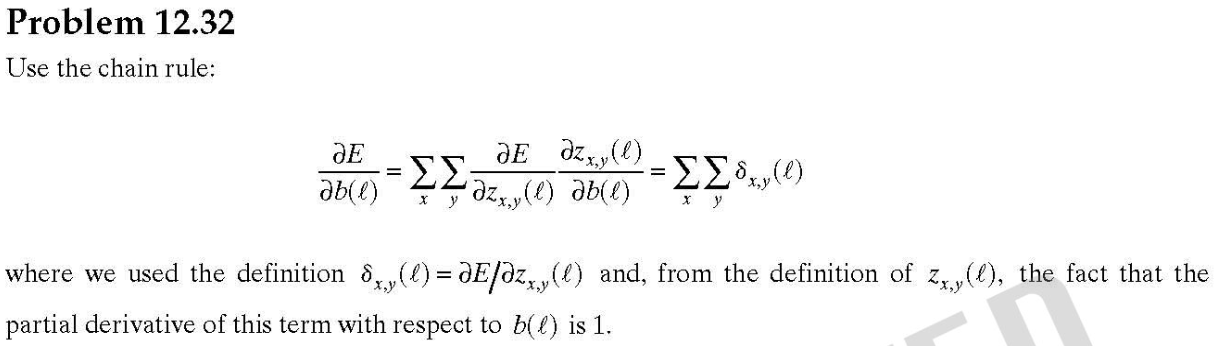
第十二章












































![[数组查找]2.图解二分查找及其代码实现](https://img-blog.csdnimg.cn/direct/5def84a21d1243c59e98e9e927668726.png)