背景
在项目使用多进程、多线程过程中,因争夺资源而造成一种资源竞态,所以需加锁处理。如下图所示,线程 A 想获取线程 B 的锁,线程 B 想获取线程 C 的锁,线程 C 想获取线程 D 的锁, 线程 D 想获取线程 A 的锁,从而构建了一个资源获取环,当进程或者线程申请的锁处于相互交叉锁住的情况,就会出现死锁,它们将无法继续运行。
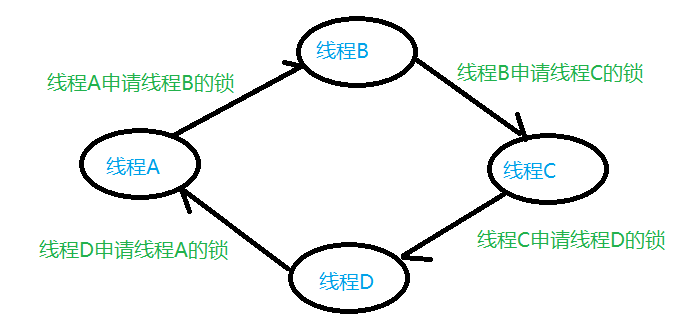
死锁的存在是因为有资源获取环的存在,所以只要能检测出资源获取环,就等同于检测出死锁的存在。
设计方案
本文实现的是一个锁管理器,提供加锁解锁功能,同时提供检测死锁功能,出现死锁后释放部分资源来解决死锁。死锁的检测是通过检测死锁图中有没有环来实现的,如果对于请求同一资源的两个锁L1和L2(其对应的进程为P1和P2),L1已经获得资源而L2在等待,则死锁图中有一条边P2->P1。
有向图中环的检测,即找到图中所有的强连通分量,使用Tarjan算法来实现,可以在O(E+V)时间找到所有的环。死锁图一般是比较稀疏的图,存储使用邻接表。
锁的数据结构为:
class Lock {
public:
Lock(int p, int res, int stat) {
pid = p;
res_id = res;
state = stat;
}
int pid;
int res_id;
int state; //0 == locked, 1 == waiting
};
锁的状态有两种,已持有,等待。对于同一个资源加的锁放在链表中,方便检索和随机位置的删除。如果一个锁L1是资源R1对应链表的头,则他是一个已经持有的锁,链表其他位置的锁Ln都在阻塞等待L1释放,因此在死锁图中新建 Ln.pid -> L1.pid 边。
锁管理器的类声明如下,实现了后台线程进行死锁检测。
class LockManager {
public:
static LockManager& getInstance();
~LockManager();
// 获取锁,返回一个指向Lock对象的shared_ptr,ret表示结果
shared_ptr<Lock> getLock(int pid, int res_id, int& ret);
// 查找指定pid和res_id的锁,返回一个指向Lock对象的shared_ptr
shared_ptr<Lock> findLock(int pid, int res_id);
// 释放锁
int releaseLock(shared_ptr<Lock> lock);
// 检测是否有死锁,若有,设置tokill为需要解除锁的pid
bool isDeadLock(int& pid);
void print();
// 启动死锁检测器,interval为检测间隔
void startDetection(int interval);
void stopDeadlockDetector();
private:
LockManager();
// 计算强连通分量(SCC),存储在pid_to_SCCid中
void calSCC(map<int, vector<int>>& pid_to_SCCid);
// 释放指定pid的所有锁
void releaseProcess(int pid);
// 内部获取锁的实现,返回一个指向Lock对象的shared_ptr,possible表示是否可能发生死锁
shared_ptr<Lock> getLockInternal(int pid, int res_id, bool& possible);
// 内部释放锁的实现,返回操作结果,possible表示是否可能发生死锁
int releaseLockInternal(shared_ptr<Lock> lock, bool& possible);
void detectDeadlock();
map<int, list<shared_ptr<Lock>>> res_to_locklist;// 资源ID到锁列表的映射
map<int, pair<int, list<shared_ptr<Lock>>>> pid_to_locks;// 进程ID到锁计数和锁列表的映射
map<int, list<int>> lock_graph;// 锁图,表示进程之间的等待依赖关系
set<int> pid_set;// 进程ID集合,用于跟踪所有活跃的进程ID
// 用于后台线程检测死锁的参数
thread* deadlock_checker;// 指向死锁检测器线程的指针
bool stop;
int check_interval;
mutex mtx;
};
具体实现
创建锁节点
获取锁:当一个进程 (pid) 请求一个资源 (res_id) 的锁时,会调用 getLock 方法。该方法首先检查该进程是否已经拥有该资源的锁(通过 findLock 方法)。
shared_ptr<Lock> LockManager::getLock(int pid, int res_id, int& ret) {
bool deadlock_possible;
ret = 0;
if (findLock(pid, res_id) != nullptr) {
ret = 1;
return nullptr;
}
mtx.lock();
auto p = getLockInternal(pid, res_id, deadlock_possible);
mtx.unlock();
return p;
}
内部获取锁逻辑:
- 如果没有找到重复的锁,会调用内部方法 getLockInternal 来实际创建并获取锁。
- 在 getLockInternal 方法中,会根据资源是否已经被其他进程锁定来创建不同状态的锁对象:
- 如果资源没有被锁定,创建一个状态为 0 的锁对象(表示已锁定)。
- 如果资源已经被其他进程锁定,创建一个状态为 1 的锁对象(表示等待)。
shared_ptr<Lock> LockManager::getLockInternal(int pid, int res_id, bool& deadlock_possible) {
deadlock_possible = false; // 初始无死锁
if (!res_to_locklist.count(res_id)) res_to_locklist[res_id] = list<shared_ptr<Lock>>{};
if (!pid_to_locks.count(pid)) pid_to_locks[pid] = make_pair(0, list<shared_ptr<Lock>>{});
pid_set.insert(pid); // 加入线程
shared_ptr<Lock> newlock;
if (res_to_locklist[res_id].size() == 0) {
newlock = make_shared<Lock>(pid, res_id, 0);
res_to_locklist[res_id].push_back(newlock);
pid_to_locks[pid].first++;
pid_to_locks[pid].second.push_back(newlock);
}
else {
newlock = make_shared<Lock>(pid, res_id, 1);
res_to_locklist[res_id].push_back(newlock);
pid_to_locks[pid].second.push_back(newlock);
if (pid_to_locks[pid].first > 0) {
const auto& first_lock = res_to_locklist[res_id].front();
int p0id = first_lock->pid;
if (!lock_graph.count(pid)) lock_graph[pid] = list<int>{};
lock_graph[pid].push_back(p0id);
deadlock_possible = true; // 可能发生死锁需要检查
}
}
return newlock;
}
释放锁
调用 releaseLock 方法释放锁对象。releaseLock 方法调用 releaseLockInternal 方法,实际进行锁释放操作。
内部释放锁的逻辑:
- 从 res_to_locklist 中移除该锁对象。
- 从 pid_to_locks 中移除该锁对象。
- 如果锁对象的状态是 0(已锁定)且资源上仍有其他锁,则将资源上的下一个等待锁(状态为 1)转换为已锁定状态(状态为 0),并更新相应进程的锁计数。
- 更新依赖关系图 (lock_graph):
- 移除当前进程到所有依赖于它的进程的边。
- 添加新的依赖关系,即新的持有锁的进程到其他等待进程的边。
int LockManager::releaseLock(shared_ptr<Lock> lock) {
bool deadlock_possible;
mtx.lock();
releaseLockInternal(lock, deadlock_possible);
mtx.unlock();
return 0;
}
int LockManager::releaseLockInternal(shared_ptr<Lock> lock, bool& deadlock_possible) {
deadlock_possible = false; // 初始化为没有死锁的可能性
int pid = lock->pid; // 获取锁的进程ID
int res_id = lock->res_id; // 获取锁的资源ID
auto& locklist = res_to_locklist[res_id]; // 获取资源对应的锁列表
locklist.remove(lock); // 从资源的锁列表中移除该锁
pid_to_locks[pid].second.remove(lock); // 从进程的锁列表中移除该锁
printf("release lock(pid=%d, res_id=%d, state=%d)\n", pid, res_id, lock->state);
if (lock->state == 0 && locklist.size() > 0) { // 如果释放的是已锁定状态的锁,且资源上还有其他等待的锁
pid_to_locks[pid].first--; // 减少该进程的锁计数
int p0id = locklist.front()->pid; // 获取新获得锁的进程ID
locklist.front()->state = 0; // 将等待的锁状态改为已锁定
pid_to_locks[p0id].first++; // 增加新获得锁的进程的锁计数
for (auto it = locklist.begin(); it != locklist.end(); it++) { // 更新依赖关系图
int p1id = (*it)->pid;
lock_graph[p1id].remove(pid); // 移除指向释放锁的进程的依赖关系
printf("remove edge(%d->%d)\n", p1id, pid);
if (p1id != p0id) {
lock_graph[p1id].push_back(p0id); // 添加新的依赖关系,指向新获得锁的进程
printf("add edge(%d->%d)\n", p1id, p0id);
}
}
// 可能导致死锁,需要检查
deadlock_possible = true;
}
return 0;
}
Kosaraju算法
对反向图进行拓扑排序,并按照拓扑排序的逆序进行深度优先搜索 (DFS),是为了高效地找到原始图中的强连通分量 (SCC)。这种方法称为 Kosaraju算法,其主要思想是:
拓扑排序 确定访问顺序:
- 对反向图进行拓扑排序,可以得到一个访问顺序,使得在原图中从某个节点出发的所有可能路径都被访问到。
- 拓扑排序保证了在原图中,某个节点的所有后继节点在排序中都在它之前。这有助于后续步骤中的 SCC 检测。
逆序DFS 高效找到 SCC:
- 按照拓扑排序的逆序进行 DFS 确保每次从尚未访问的节点出发时,能够遍历一个完整的强连通分量。
- 由于拓扑排序的逆序保证了我们从图的“后面”开始访问(即从没有后继节点的节点开始),所以每次 DFS 都会完全包含一个 SCC。
这种方法的效率很高,因为每个节点和每条边都只被访问两次(一次在拓扑排序时,一次在逆序 DFS 时),所以 Kosaraju 算法的时间复杂度是 O(V + E),其中 V 是节点数,E 是边数。
死锁检测是通过计算锁图的强连通分量 (SCC) 来实现的。首先通过 reverseGraph 方法构建锁图的反向图。
void reverseGraph(map<int, list<int>>& origin, map<int, list<int>>& dest) {
for (const auto& p : origin) {
int e = p.first;
const auto& vec = p.second;
for (auto v : vec) {
if (!dest.count(v)) dest[v] = list<int>{};
dest[v].push_back(e);
}
}
}
通过 topoSort 方法对反向图进行拓扑排序,按照拓扑排序的逆序进行DFS。
void dfs(map<int, list<int>>& graph, int cur, set<int>& visited, vector<int>& topo_order) {
if (visited.count(cur)) return;
visited.insert(cur);
for (auto x : graph[cur]) {
dfs(graph, x, visited, topo_order);
}
topo_order.push_back(cur);
}
void topoSort(map<int, list<int>>& graph, set<int>& pid_set, vector<int>& topo_order) {
set<int> visited;
for (auto x : pid_set) {
dfs(graph, x, visited, topo_order);
}
}
通过深度优先搜索 (DFS) 来计算锁图中的强连通分量。检查是否存在强连通分量。如果存在,说明有死锁,并选择一个进程进行终止以打破死锁。
void LockManager::calSCC(map<int, vector<int>>& pid_to_SCCid) {
map<int, list<int>> reverse_graph;
reverseGraph(lock_graph, reverse_graph); // 构建反向图
vector<int> topo_order;
topoSort(reverse_graph, pid_set, topo_order); // 对反向图进行拓扑排序
set<int> visited;
for (int i = topo_order.size() - 1; i >= 0; i--) { // 按照拓扑排序的逆序进行DFS
auto vec = vector<int>{};
dfs(lock_graph, topo_order[i], visited, vec);
if (vec.size() > 1) pid_to_SCCid[i] = vec; // 找到强连通分量
}
}
后台检测死锁
isDeadLock是实际进行检测死锁的函数:
计算强连通分量 (SCC):调用 calSCC 方法,计算图中的强连通分量并将结果存储。每个强连通分量表示一个可能的死锁环。
遍历每个强连通分量:对于每个强连通分量中的进程,打印其进程ID,并找到锁数量最少的进程。
选择要终止的进程:如果找到了锁数量最少的进程,将其标记为 tokill。通过终止该进程来打破死锁。
如果存在强连通分量,返回 true 表示存在死锁
bool LockManager::isDeadLock(int& tokill) {
map<int, vector<int>> SCCid_to_pids;
calSCC(SCCid_to_pids); // 计算强连通分量
for (const auto& cyc : SCCid_to_pids) { // 遍历每个强连通分量
const auto& vec = cyc.second;
printf("detected deadlock: ");
int minlocks = 1e8;
int minpid = -1;
for (auto it = vec.begin(); it != vec.end(); it++) { // 打印并找到最少锁的进程
printf("%d->", *it);
int nlock = pid_to_locks[*it].first;
if (nlock < minlocks) {
minlocks = nlock;
minpid = *it;
}
}
printf("%d\n", vec.front());
if (minpid != -1) {
printf("will release pid=%d(%d) to break deadlock\n", minpid, minlocks);
tokill = minpid; // 选择需要终止的进程
}
}
return SCCid_to_pids.size() > 0; // 如果存在强连通分量,说明存在死锁
}
detectDeadlock方法是一个后台线程,用于定期检测死锁并处理死锁。
LockManager::LockManager() {
stop = false;
check_interval = 1;
deadlock_checker = new thread([this] { this->detectDeadlock(); });
}
void LockManager::detectDeadlock() {
using std::chrono::system_clock;
while (!stop) {
int tokill;
mtx.lock();
while (isDeadLock(tokill)) {
releaseProcess(tokill);
}
mtx.unlock();
// 检查死锁
std::time_t tt = system_clock::to_time_t(system_clock::now());
struct std::tm* ptm = std::localtime(&tt);
ptm->tm_sec += check_interval;
std::this_thread::sleep_until(system_clock::from_time_t(mktime(ptm)));
}
}
结果展示
使用下文的完整代码测试,set lock设置锁,release lock释放,
int main() {
doGetLock(1, 2);
doGetLock(1, 3);
doGetLock(2, 2);
doGetLock(3, 3);
doGetLock(2, 3);
doGetLock(3, 2);
doReleaseLock(1, 2);
doReleaseLock(1, 3);
std::this_thread::sleep_for(std::chrono::seconds(2));
doGetLock(5, 5);
doGetLock(6, 6);
doGetLock(5, 6);
doGetLock(6, 5);
int pid, resid;
char tmp[40];
while (scanf("%s %d %d", tmp, &pid, &resid) != EOF) {
if (string(tmp) == "lock") {
doGetLock(pid, resid);
}
else {
doReleaseLock(pid, resid);
}
}
std::this_thread::sleep_for(std::chrono::seconds(1));
LockManager::getInstance().stopDeadlockDetector();
return 0;
}
set lock(pid=1, res_id=2)
set lock(pid=1, res_id=3)
set lock(pid=2, res_id=2)
set lock(pid=3, res_id=3)
set lock(pid=2, res_id=3)
set lock(pid=3, res_id=2)
release lock(pid=1, res_id=2, state=0)
remove edge(2->1)
remove edge(3->1)
add edge(3->2) //锁交还2
release lock(pid=1, res_id=3, state=0)
remove edge(3->1)
remove edge(2->1)
add edge(2->3)
detected deadlock: 3->2->3
will release pid=3(1) to break deadlock
release lock(pid=3, res_id=3, state=0)
remove edge(2->3)
release lock(pid=3, res_id=2, state=1)
erase pid 3
set lock(pid=5, res_id=5)
set lock(pid=6, res_id=6)
set lock(pid=5, res_id=6)
set lock(pid=6, res_id=5)
detected deadlock: 6->5->6
will release pid=6(1) to break deadlock
release lock(pid=6, res_id=6, state=0)
remove edge(5->6)
release lock(pid=6, res_id=5, state=1)
erase pid 6
设置锁:
- set lock(pid=1, res_id=2): 进程1请求资源2的锁。
- set lock(pid=1, res_id=3): 进程1请求资源3的锁。
- set lock(pid=2, res_id=2): 进程2请求资源2的锁。
- set lock(pid=3, res_id=3): 进程3请求资源3的锁。
- set lock(pid=2, res_id=3): 进程2请求资源3的锁。
- set lock(pid=3, res_id=2): 进程3请求资源2的锁。
释放锁:
- release lock(pid=1, res_id=2, state=0): 进程1释放资源2的锁(锁处于已锁定状态)。
- remove edge(2->1): 从进程2到进程1的依赖关系被移除。
- remove edge(3->1): 从进程3到进程1的依赖关系被移除。
- add edge(3->2): 添加新的依赖关系,从进程3到进程2。
- release lock(pid=1, res_id=3, state=0): 进程1释放资源3的锁(锁处于已锁定状态)。
- remove edge(3->1): 从进程3到进程1的依赖关系被移除。
- remove edge(2->1): 从进程2到进程1的依赖关系被移除。
- add edge(2->3): 添加新的依赖关系,从进程2到进程3。
检测到死锁:
- detected deadlock: 3->2->3: 检测到由进程3和进程2组成的死锁循环。
- will release pid=3(1) to break deadlock: 选择进程3(持有一个锁)来解除死锁。
解除死锁:
- release lock(pid=3, res_id=3, state=0): 释放进程3持有的资源3的锁(锁处于已锁定状态)。
- remove edge(2->3): 移除从进程2到进程3的依赖关系。
- release lock(pid=3, res_id=2, state=1): 释放进程3持有的资源2的锁(锁处于等待状态)。
- erase pid 3: 从锁管理器中移除进程3。
设置新的锁:
- set lock(pid=5, res_id=5): 进程5请求资源5的锁。
- set lock(pid=6, res_id=6): 进程6请求资源6的锁。
- set lock(pid=5, res_id=6): 进程5请求资源6的锁。
- set lock(pid=6, res_id=5): 进程6请求资源5的锁。
再次检测到死锁:
- detected deadlock: 6->5->6: 检测到由进程6和进程5组成的死锁循环。
- will release pid=6(1) to break deadlock: 选择进程6(持有一个锁)来解除死锁。
解除新的死锁:
- release lock(pid=6, res_id=6, state=0): 释放进程6持有的资源6的锁(锁处于已锁定状态)。
- remove edge(5->6): 移除从进程5到进程6的依赖关系。
- release lock(pid=6, res_id=5, state=1): 释放进程6持有的资源5的锁(锁处于等待状态)。
- erase pid 6: 从锁管理器中移除进程6。
完整代码
#include <iostream>
#include <memory>
#include <map>
#include <list>
#include <vector>
#include <set>
#include <string>
#include <thread>
#include <chrono>
#include <mutex>
using namespace std;
class Lock {
public:
Lock(int p, int res, int stat) {
pid = p;
res_id = res;
state = stat;
}
int pid;
int res_id;
int state; //0 == locked, 1 == waiting
};
typedef pair<int, list<shared_ptr<Lock> > > pivec;
class LockManager {
public:
static LockManager& getInstance();
~LockManager();
// 获取锁,返回一个指向Lock对象的shared_ptr,ret表示结果
shared_ptr<Lock> getLock(int pid, int res_id, int& ret);
// 查找指定pid和res_id的锁,返回一个指向Lock对象的shared_ptr
shared_ptr<Lock> findLock(int pid, int res_id);
// 释放锁
int releaseLock(shared_ptr<Lock> lock);
// 检测是否有死锁,若有,设置tokill为需要解除锁的pid
bool isDeadLock(int& pid);
void print();
// 启动死锁检测器,interval为检测间隔
void startDetection(int interval);
void stopDeadlockDetector();
private:
LockManager();
// 计算强连通分量(SCC),存储在pid_to_SCCid中
void calSCC(map<int, vector<int>>& pid_to_SCCid);
// 释放指定pid的所有锁
void releaseProcess(int pid);
// 内部获取锁的实现,返回一个指向Lock对象的shared_ptr,possible表示是否可能发生死锁
shared_ptr<Lock> getLockInternal(int pid, int res_id, bool& possible);
// 内部释放锁的实现,返回操作结果,possible表示是否可能发生死锁
int releaseLockInternal(shared_ptr<Lock> lock, bool& possible);
void detectDeadlock();
map<int, list<shared_ptr<Lock>>> res_to_locklist;// 资源ID到锁列表的映射
map<int, pair<int, list<shared_ptr<Lock>>>> pid_to_locks;// 进程ID到锁计数和锁列表的映射
map<int, list<int>> lock_graph;// 锁图,表示进程之间的等待依赖关系
set<int> pid_set;// 进程ID集合,用于跟踪所有活跃的进程ID
// 用于后台线程检测死锁的参数
thread* deadlock_checker;// 指向死锁检测器线程的指针
bool stop;
int check_interval;
mutex mtx;
};
LockManager::LockManager() {
stop = false;
check_interval = 1;
deadlock_checker = new thread([this] { this->detectDeadlock(); });
}
LockManager::~LockManager() {
stopDeadlockDetector();
}
LockManager& LockManager::getInstance() {
static LockManager inst;
return inst;
}
shared_ptr<Lock> LockManager::getLock(int pid, int res_id, int& ret) {
bool deadlock_possible;
ret = 0;
if (findLock(pid, res_id) != nullptr) {
ret = 1;
return nullptr;
}
mtx.lock();
auto p = getLockInternal(pid, res_id, deadlock_possible);
mtx.unlock();
return p;
}
shared_ptr<Lock> LockManager::getLockInternal(int pid, int res_id, bool& deadlock_possible) {
deadlock_possible = false;
if (!res_to_locklist.count(res_id)) res_to_locklist[res_id] = list<shared_ptr<Lock>>{};
if (!pid_to_locks.count(pid)) pid_to_locks[pid] = make_pair(0, list<shared_ptr<Lock>>{});
pid_set.insert(pid);
shared_ptr<Lock> newlock;
if (res_to_locklist[res_id].size() == 0) {
newlock = make_shared<Lock>(pid, res_id, 0);
res_to_locklist[res_id].push_back(newlock);
pid_to_locks[pid].first++;
pid_to_locks[pid].second.push_back(newlock);
}
else {
newlock = make_shared<Lock>(pid, res_id, 1);
res_to_locklist[res_id].push_back(newlock);
pid_to_locks[pid].second.push_back(newlock);
if (pid_to_locks[pid].first > 0) {
const auto& first_lock = res_to_locklist[res_id].front();
int p0id = first_lock->pid;
if (!lock_graph.count(pid)) lock_graph[pid] = list<int>{};
lock_graph[pid].push_back(p0id);
deadlock_possible = true;
}
}
return newlock;
}
shared_ptr<Lock> LockManager::findLock(int pid, int res_id) {
shared_ptr<Lock> result = nullptr;
mtx.lock();
for (const auto& p : pid_to_locks[pid].second) {
if (p->res_id == res_id) result = p;
}
mtx.unlock();
return result;
}
int LockManager::releaseLock(shared_ptr<Lock> lock) {
bool deadlock_possible;
mtx.lock();
releaseLockInternal(lock, deadlock_possible);
mtx.unlock();
return 0;
}
int LockManager::releaseLockInternal(shared_ptr<Lock> lock, bool& deadlock_possible) {
deadlock_possible = false;
int pid = lock->pid;
int res_id = lock->res_id;
auto& locklist = res_to_locklist[res_id];
locklist.remove(lock);
pid_to_locks[pid].second.remove(lock);
printf("release lock(pid=%d, res_id=%d, state=%d)\n", pid, res_id, lock->state);
if (lock->state == 0 && locklist.size() > 0) {
pid_to_locks[pid].first--;
int p0id = locklist.front()->pid;
locklist.front()->state = 0;
pid_to_locks[p0id].first++;
for (auto it = locklist.begin(); it != locklist.end(); it++) {
int p1id = (*it)->pid;
lock_graph[p1id].remove(pid);
printf("remove edge(%d->%d)\n", p1id, pid);
if (p1id != p0id) {
lock_graph[p1id].push_back(p0id);
printf("add edge(%d->%d)\n", p1id, p0id);
}
}
deadlock_possible = true;
}
return 0;
}
bool LockManager::isDeadLock(int& tokill) {
map<int, vector<int>> SCCid_to_pids;
calSCC(SCCid_to_pids);
for (const auto& cyc : SCCid_to_pids) {
const auto& vec = cyc.second;
printf("detected deadlock: ");
int minlocks = 1e8;
int minpid = -1;
for (auto it = vec.begin(); it != vec.end(); it++) {
printf("%d->", *it);
int nlock = pid_to_locks[*it].first;
if (nlock < minlocks) {
minlocks = nlock;
minpid = *it;
}
}
printf("%d\n", vec.front());
if (minpid != -1) {
printf("will release pid=%d(%d) to break deadlock\n", minpid, minlocks);
tokill = minpid;
}
}
return SCCid_to_pids.size() > 0;
}
void LockManager::releaseProcess(int pid) {
if (pid_to_locks.count(pid)) {
list<shared_ptr<Lock>> tmplist = pid_to_locks[pid].second;
for (const auto& p_lock : tmplist) {
bool possible;
releaseLockInternal(p_lock, possible);
}
pid_to_locks.erase(pid);
};
if (lock_graph.count(pid)) lock_graph.erase(pid);
pid_set.erase(pid);
printf("erase pid %d\n", pid);
}
//死锁检测
void LockManager::startDetection(int interval) {
if (deadlock_checker != nullptr) {
check_interval = interval;
deadlock_checker = new thread([this] {
this->detectDeadlock();
});
}
}
void LockManager::stopDeadlockDetector() {
stop = true;
if (deadlock_checker && deadlock_checker->joinable()) {
printf("deadlock detector is stoped\n");
deadlock_checker->join();
deadlock_checker = nullptr;
}
}
void LockManager::detectDeadlock() {
using std::chrono::system_clock;
while (!stop) {
int tokill;
mtx.lock();
while (isDeadLock(tokill)) {
releaseProcess(tokill);
}
mtx.unlock();
// 检查死锁
std::time_t tt = system_clock::to_time_t(system_clock::now());
struct std::tm* ptm = std::localtime(&tt);
ptm->tm_sec += check_interval;
std::this_thread::sleep_until(system_clock::from_time_t(mktime(ptm)));
}
}
// 计算SCC的辅助函数
void reverseGraph(map<int, list<int>>& origin, map<int, list<int>>& dest) {
for (const auto& p : origin) {
int e = p.first;
const auto& vec = p.second;
for (auto v : vec) {
if (!dest.count(v)) dest[v] = list<int>{};
dest[v].push_back(e);
}
}
}
void dfs(map<int, list<int>>& graph, int cur, set<int>& visited, vector<int>& topo_order) {
if (visited.count(cur)) return;
visited.insert(cur);
for (auto x : graph[cur]) {
dfs(graph, x, visited, topo_order);
}
topo_order.push_back(cur);
}
void topoSort(map<int, list<int>>& graph, set<int>& pid_set, vector<int>& topo_order) {
set<int> visited;
for (auto x : pid_set) {
dfs(graph, x, visited, topo_order);
}
}
void printVec(vector<int>& vec) {
printf("vector[%d", vec.front());
for (auto it = vec.begin() + 1; it != vec.end(); it++) {
printf(",%d", *it);
}
printf("]\n");
}
void LockManager::calSCC(map<int, vector<int>>& pid_to_SCCid) {
map<int, list<int>> reverse_graph;
reverseGraph(lock_graph, reverse_graph);
vector<int> topo_order;
topoSort(reverse_graph, pid_set, topo_order);
set<int> visited;
for (int i = topo_order.size() - 1; i >= 0; i--) {
auto vec = vector<int>{};
dfs(lock_graph, topo_order[i], visited, vec);
if (vec.size() > 1) pid_to_SCCid[i] = vec;
}
}
void LockManager::print() {
cout << "pid to locks:[\n";
for (const auto& p : pid_to_locks) {
printf("(%d, %d, [", p.first, p.second.first);
for (const auto& q : p.second.second) {
printf("(pid=%d, res_id=%d, state=%d),", q->pid, q->res_id, q->state);
}
printf("])\n");
}
cout << ']' << endl << "res to locks:[\n";
for (const auto& p : res_to_locklist) {
printf("(%d, [", p.first);
for (const auto& q : p.second) {
printf("(pid=%d, res_id=%d, state=%d),", q->pid, q->res_id, q->state);
}
printf("])\n");
}
cout << ']' << endl << "graph:[\n";
for (const auto& p : lock_graph) {
int e = p.first;
printf("%d:[", e);
for (const auto& q : p.second) {
printf("%d,", q);
}
printf("]\n");
}
cout << ']' << endl << "pid_set:[";
for (auto x : pid_set) printf("%d, ", x);
cout << ']' << endl;
}
int doGetLock(int pid, int rid) {
static auto& lock_manager = LockManager::getInstance();
int ret;
printf("set lock(pid=%d, res_id=%d)\n", pid, rid);
lock_manager.getLock(pid, rid, ret);
if (ret == 1) {
printf("lock(pid=%d, res_id=%d) is duplicated, lock failed\n", pid, rid);
}
return ret;
}
int doReleaseLock(int pid, int rid) {
static auto& lock_manager = LockManager::getInstance();
auto lock = lock_manager.findLock(pid, rid);
if (lock != nullptr) lock_manager.releaseLock(lock);
else printf("no such lock(pid=%d, res_id=%d)\n", pid, rid);
return 0;
}
int main() {
doGetLock(1, 2);
doGetLock(1, 3);
doGetLock(2, 2);
doGetLock(3, 3);
doGetLock(2, 3);
doGetLock(3, 2);
doReleaseLock(1, 2);
doReleaseLock(1, 3);
std::this_thread::sleep_for(std::chrono::seconds(2));
doGetLock(5, 5);
doGetLock(6, 6);
doGetLock(5, 6);
doGetLock(6, 5);
int pid, resid;
char tmp[40];
while (scanf("%s %d %d", tmp, &pid, &resid) != EOF) {
if (string(tmp) == "lock") {
doGetLock(pid, resid);
}
else {
doReleaseLock(pid, resid);
}
}
std::this_thread::sleep_for(std::chrono::seconds(1));
LockManager::getInstance().stopDeadlockDetector();
return 0;
}