视觉小车
- 齐护编程小车端程序
- 动作说明
- 联系我们
在经常做小车任务项目时会用的K210的视觉与巡线或其它动作结合,这就关系到要将K210的识别结果传送给小车的主控制器,K210为辅助传感器(视觉采集)。
 这节课我们用K210识别图像(二维码)并将二维码指令转换成字符串,通过串口发送给编程电车,控制小车的动作。
这节课我们用K210识别图像(二维码)并将二维码指令转换成字符串,通过串口发送给编程电车,控制小车的动作。
二维码的准备
我们以如下4个二维码为例,大家可以到在线网站自行生成自己要的的二维码。
二维码在线生成网站:https://cli.im/text




AIstart_K210端程序
与小车连接的端口P9-P8也就是AIstart 上的19-18端口,我们用数据线连接上刚好可以用小车的P5(串口)电池供电,只要打开电源开关即可。

齐护编程小车端程序
小车的主板是ArduinoUNO的(齐护C01主控板),小车P5不要接其它的,供AIstart连接用,上传程序时要拔开P5(因为P5就是串口,不拿开会影响上传程序),上传完成后再插回。
注:小车要充电足够,不然无法驱动电机或K210。

动作说明
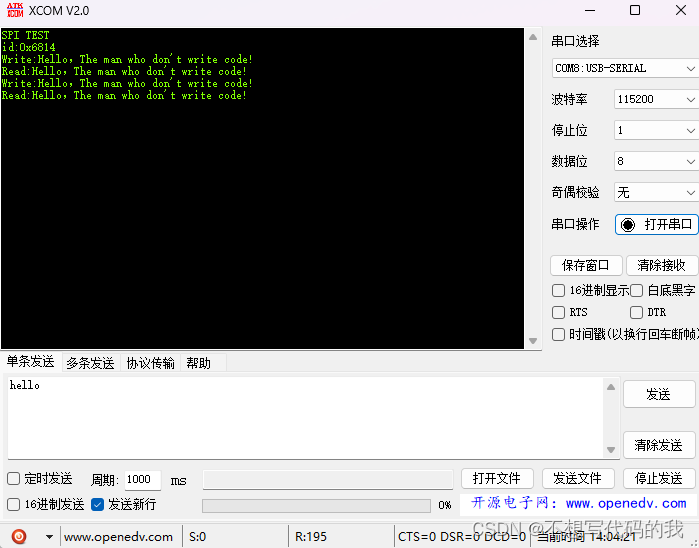
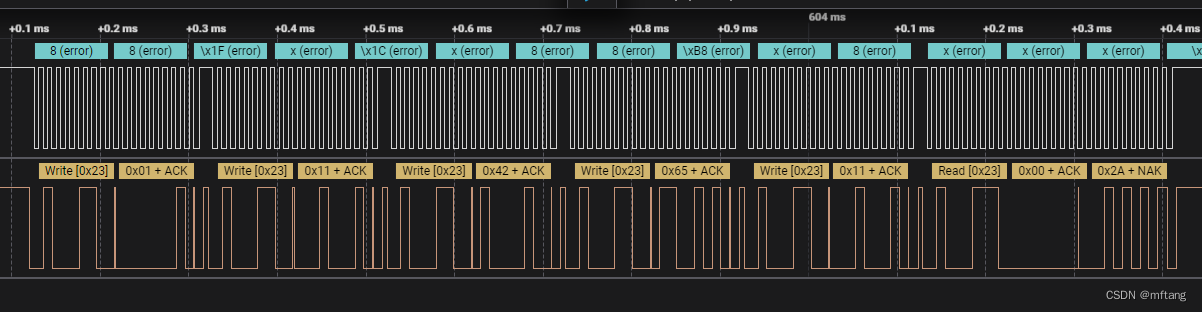
将如上程序分别上传到K210及齐护编程小车,当K210识别到对应的卡片二维码时,小车就会对应的动作。注意,小车上的P5同时也是硬串(USB)程序块上的波特率是115200,所以K210上的发送也要设置成相同的。
同时我们可以加入其它的功能,比如当巡线到某一个有二维码的路口时,执行对应的动作,比赛时可以随机的更换二维码,或更换摄像头的角度,识别到不同的二维码去执行不同的任务,达到不同的目标动作。
程序下载
视觉小车程序
联系我们
扫码或者点这里加群了解更多!

Created by qdprobot