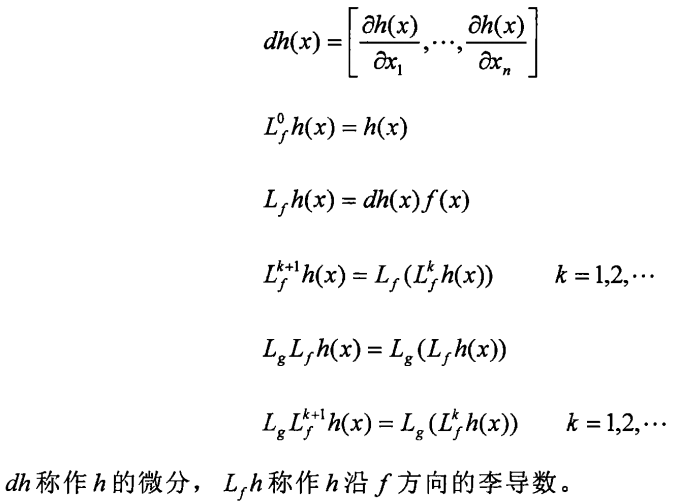
机器人非线性控制方法是针对具有非线性特性的机器人系统所设计的一系列控制策略。其中,精确线性化控制和反演控制是两种重要的方法。
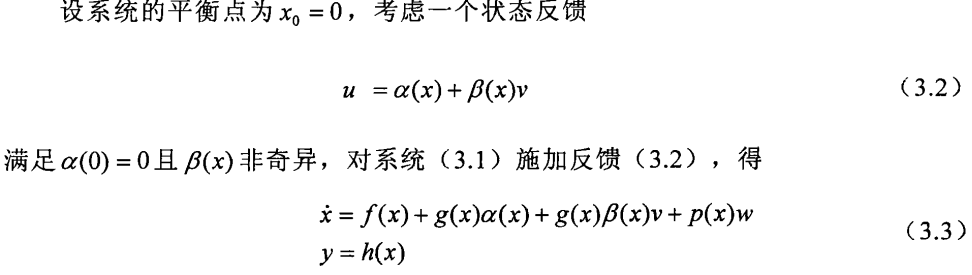
1. 非线性反馈控制
该控制律采用非线性反馈控制的方法,将控制输入 u 分解为两个部分:
-
α(x): 这是一个与系统状态 x 相关的非线性函数,表示系统本身的非线性特性。通过这个项,可以补偿系统的非线性行为,使得系统在某个工作点附近表现为线性系统。
-
β(x)v: 这是一个带有增益 β(x) 的控制输入 v,其中 )β(x) 也是系统状态 x 的函数。这部分表示通过线性化后的控制输入v 作用在系统上的效果。
2. 线性化与解耦
该控制律的形式通常用于非线性系统的线性化与解耦。通过选择适当的α(x) 和 β(x),可以将复杂的非线性系统转换为线性系统,简化控制器的设计和分析。具体实现方法包括:
-
反馈线性化:通过选择合适的α(x) 和β(x),使得非线性系统的动态方程在某个工作点附近表现为线性系统,从而可以应用线性控制理论设计控制器。
-
解耦控制:如果系统是多输入多输出(MIMO)系统,通过适当的 α(x) 和 β(x),可以实现系统的解耦,即将复杂的多变量系统分解为若干个独立的单变量系统。
3. 实际应用中的意义
在实际应用中,这种控制律具有广泛的应用场景,例如:
-
机器人控制:在机器人臂控制中,非线性反馈控制律可以用于补偿关节的非线性特性,使得整个机器人系统在控制输入下表现为线性系统,从而提高控制精度和稳定性。
非线性控制系统: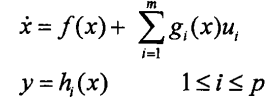
- 微分几何方法:
微分几何方法的实质是通过非线性反馈或动态补偿,将非线性系统变换为线性系统。这种方法在Henmann, Brockett, Isidori等学者的积极倡导下,成为非线性控制研究的主流。它主要利用微分几何理论中的工具,如李代数、李群等,对非线性系统进行深入的分析和变换。微分几何方法的主要缺点是使用的数学工具较抽象,对系统模型精度要求很高,实际应用难以实现。
- 输入输出解耦:
输入输出解耦是一种常用的解耦方法,它的主要目标是使系统的输出只受相应输入的影响,而不受其他输入的影响。在机器人控制中,这可以通过设计合适的控制器和算法来实现。输入输出解耦有助于提高系统的控制精度和稳定性。
- 干扰解耦:
干扰解耦是针对系统中存在的干扰进行解耦的方法。在机器人控制中,由于外部环境和内部因素的影响,系统常常会受到各种干扰。干扰解耦的目的是消除或减小这些干扰对系统性能的影响。这可以通过设计鲁棒性强的控制器、采用滤波技术或引入补偿机制等方法来实现。
- 鲁棒解耦:
鲁棒解耦是在解耦控制的基础上引入鲁棒性控制的方法。由于机器人系统在实际运行中常常会受到各种不确定性和干扰的影响,因此提高系统的鲁棒性是非常重要的。鲁棒解耦控制旨在设计一种控制器,既能够实现系统的解耦控制,又能够使系统具有一定的鲁棒性,以应对不确定性和干扰的影响。
- 微分代数方法:
微分代数方法在处理非线性系统时,通过引入代数方程来描述系统的动态特性。这种方法在机器人控制中主要用于处理具有非线性代数约束的系统,如机器人的运动学和动力学方程。微分代数方法能够更精确地描述系统的动态特性,从而有助于设计更有效的解耦控制器。


控制方法:
- 精确线性化控制:
精确线性化控制是一种通过数学变换将非线性系统转化为线性系统的方法。这种方法的核心思想是在非线性系统中找到一个等效的线性系统,使得非线性系统的特性可以通过线性控制理论来分析和设计控制器。精确线性化控制基于泰勒级数展开的原理,通过将非线性系统的输出和输入表示为泰勒级数的形式,从而将非线性系统转化为一个线性系统。这种方法可以提供一个非常准确的线性化模型,从而更精确地分析和设计控制器。
在机器人控制中,精确线性化控制可以用于处理具有复杂非线性特性的机器人系统。通过精确线性化,可以将机器人的动态特性转化为线性形式,然后应用线性控制理论来设计控制器。这种方法可以提高机器人的控制精度和稳定性,但实现起来可能比较复杂,需要较高的数学和计算能力。
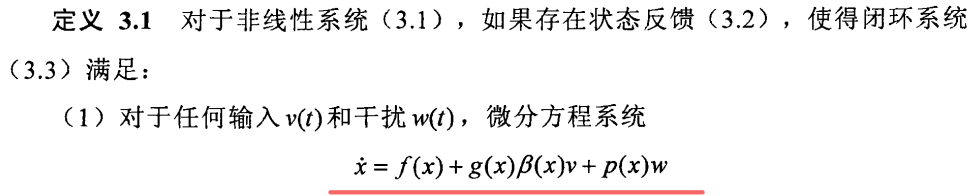
- 反演控制:
反演控制是一种非线性系统设计方法,其基本思想是将复杂的非线性系统分解成多个更简单和阶数更低的子系统,然后分别对每个子系统设计控制器。反演控制通过引入虚拟控制量,将系统的动态特性逐步地转化为一个可以直接控制的形式。在这个过程中,反演控制会逐步地推导出最终的控制律和参数自适应律,从而实现对系统的有效控制和全局调节。
在机器人控制中,反演控制可以用于处理具有不确定性和非线性特性的机器人系统。通过反演控制,可以将机器人的动态特性分解为多个子系统,然后针对每个子系统设计相应的控制器。这种方法可以提高机器人的鲁棒性和适应性,使其能够更好地应对外部干扰和不确定性。但反演控制实现起来也比较复杂,需要较高的系统建模和控制器设计能力。
机械臂的动力学模型是如何解耦和线性化的?常用的线性化解耦方法有哪些? - 知乎机械臂的动力学模型是非线性时变二阶系统,机械臂关节之前还存在耦合作用,那它是如何被一步步的变成了常…![]() https://www.zhihu.com/question/52607272
https://www.zhihu.com/question/52607272
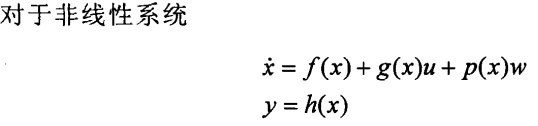 (3.1)
(3.1)

1. 复杂性简化
非线性系统的复杂性: 机器人系统通常是高度非线性的,这意味着系统的动力学方程可能非常复杂,难以直接分析和设计控制器。非线性方程往往没有解析解,分析和求解变得非常困难。
线性化的优势: 线性化是将非线性系统在某个工作点附近用线性模型近似,这使得可以应用成熟的线性控制理论和方法,如PID控制、LQR控制等。这些线性控制方法相对简单且有广泛的理论支持和实际应用经验。
2. 可预测性和稳定性
线性系统的可预测性: 线性系统的行为在数学上是可预测的,可以通过求解线性微分方程得到精确解。这对于设计和验证控制器的性能非常重要。
稳定性分析的简化: 在线性化模型下,可以使用丰富的线性系统稳定性分析工具(如特征值分析、Nyquist判据、Bode图等)来分析系统的稳定性。这些工具对于非线性系统往往无法直接使用。
3. 控制器设计
解耦的需求: 机器人系统通常是多输入多输出(MIMO)系统,不同关节和运动之间存在耦合。解耦的目的是将复杂的MIMO系统转换为多个相对独立的单输入单输出(SISO)系统,使得每个子系统可以独立控制。这大大简化了控制器的设计和实现。
解耦的实现: 通过解耦,可以独立设计每个子系统的控制器,减少了相互之间的干扰。例如,使用反馈线性化、前馈补偿等技术,可以将耦合的多变量系统转换为解耦的单变量系统,简化控制器的设计过程。
4. 实际应用中的可行性
实时控制的需求: 线性化和解耦后的系统计算量较小,更适合实时控制的需求。在实际应用中,控制器需要在较短的时间内完成计算和响应,线性模型更容易满足实时性要求。
鲁棒性和适应性: 线性化和解耦虽然是局部近似,但在多数情况下可以提供足够好的性能和鲁棒性。如果系统在工作点附近运行,线性近似通常是有效的,解耦可以使得控制器在面对外部扰动和参数变化时更具适应性。