论文链接
2311.04079v1 (arxiv.org)![]() https://arxiv.org/pdf/2311.04079v1
https://arxiv.org/pdf/2311.04079v1
研究背景
理解道路的拓扑关系是自动驾驶中很重要的一个环节,以往这个部分都是通过HD地图,及高精度地图的数据训练来实现的。高精度地图具备很多的标注信息和很明确的语义信息,模型可以很容易学习到其中的道路拓扑关系。但是高精度地图的维护成本是很高的,而SD地图的成本会低很多,覆盖面也更广,所以文章研究如何使用SD来提升模型对于道路信息的理解。
提出SMERF
作者提出了一种名为SMERF的新型基于Transformer的编码器框架。该框架将SD地图整合到现有的车道拓扑模型中,以提高其性能。具体方法如下:
- SD地图整合:SD地图用于提供道路层级拓扑的先验信息。这些地图通过Transformer编码器编码成特征表示。
- 交叉注意力机制:编码后的SD地图特征通过交叉注意力机制与来自车载摄像头输入的特征相结合。这种融合使模型能够更有效地推理车道拓扑,特别是在被遮挡或不太明显的区域。
- 车道拓扑模型:增强的特征被输入到车道拓扑模型中,以预测车道中心线、交通元素及其关系。
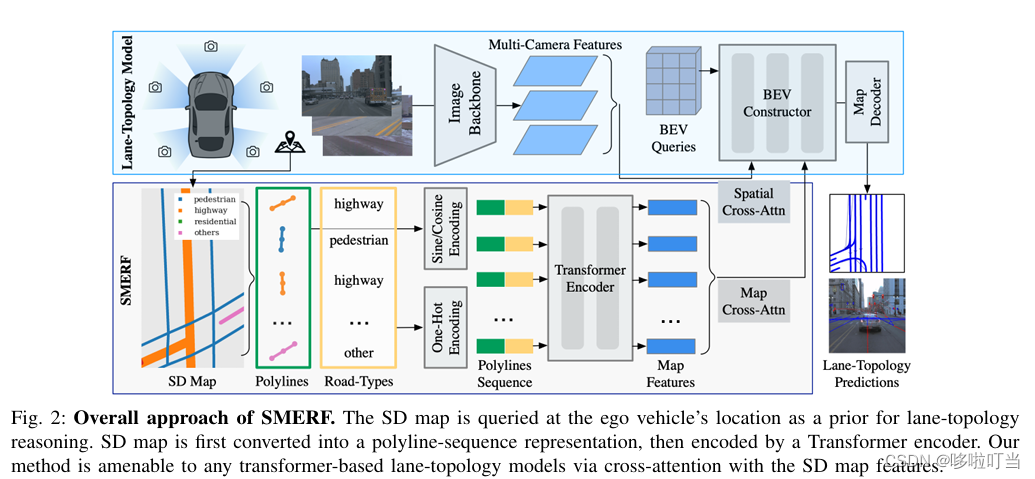
示意图详解:
1. SD地图中的所有连线都是含有高度语义信息的,这里SMERF把每条link中的点的信息都提取出来,单独为每个link都做一个点的序列
2. 叠加上对应道路的道路类型等简单的标注信息,结合起来做编码成一个一个token
3. 输入Transformer编码器中学习,做交叉自注意力机制,最终输出的就是富含地图语义特征的token序列
4. 把这些特征token和地图信息做交叉注意力后,再结合多视角图像backbone后的特征一起去做空间注意力,构造产生新的BEV
5. 最后再利训练一个解码的模型,可以实现模型从SD中学习理解到车道拖布信息并且标注到图像中
SMERF这个方式其实比以往的toponet简洁,性能也不差
实验验证
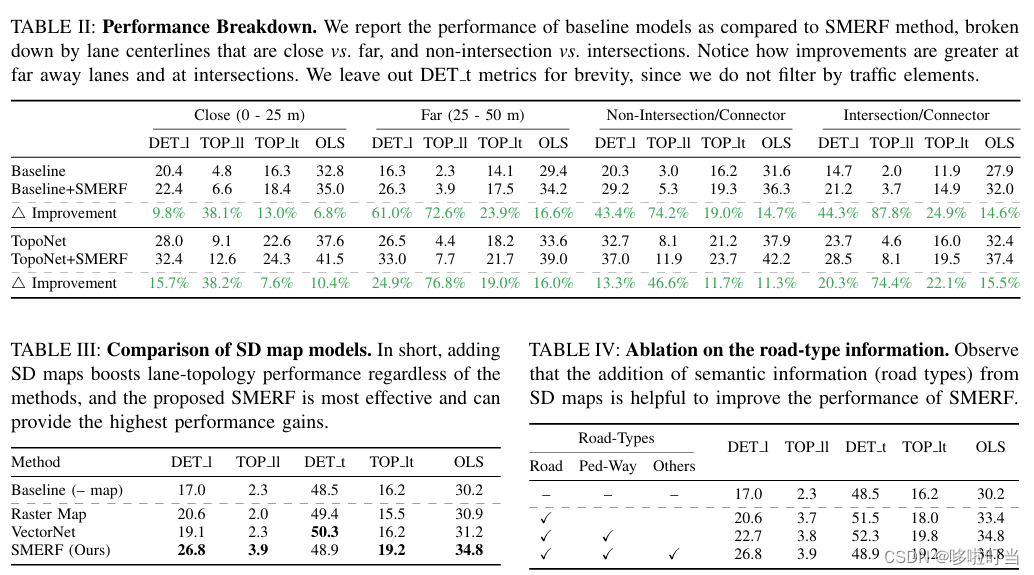
该方法在OpenLane-V2数据集上进行了验证,这是一个用于自动驾驶的大型真实世界感知数据集。结果表明,在结合SD地图后,各种模型的车道检测和拓扑预测性能均有显著提升。
总结贡献
- 首次使用SD地图进行车道拓扑理解:这是首次系统地探索SD地图在车道拓扑理解中的作用。
- 基于Transformer的编码器:引入了一个基于Transformer的编码器模型,以有效利用SD地图。
- 性能提升:实验证明,使用SD地图显著提升了车道检测和拓扑预测的性能。