目录
1. MPU6050简介
2. MPU6050参数
3. MPU6050硬件电路
4. 代码编写
4.1 MPU6050写寄存器
4.2 MPU6050读寄存器
4.3 初始化
4.4 MPU6050获取ID号
4.5 MPU6050获取数据
1. MPU6050简介
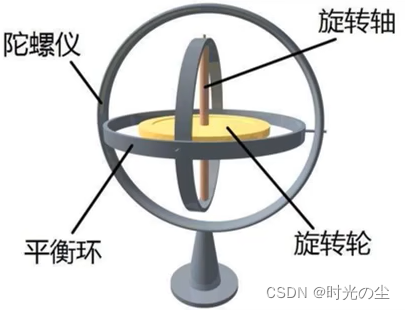
MPU6050是一个6轴姿态传感器,可以测量芯片自身X、Y、Z轴的加速度、角速度参数,通过数据融合,可进一步得到姿态角,常应用于平衡车、飞行器等需要检测自身姿态的场景。

3轴加速度计(Accelerometer) :测量X、Y、Z轴的加速度

3轴陀螺仪传感器(Gyroscope):测量X、Y、Z轴的角速度
2. MPU6050参数
16位ADC采集传感器的模拟信号,量化范围:-32768~32767
加速度计满量程选择:±2、±4、±8、±16(g)
陀螺仪满量程选择: ±250、±500、±1000、±2000(°/sec)
可配置的数字低通滤波器:数字低通滤波器用于去除信号中的高频噪声,保留信号中的低频成分。这对于在嘈杂的环境中准确测量传感器数据非常重要。
可配置的时钟源:时钟源可以是内部时钟或外部时钟,用于同步传感器的采样和数据传输。
可配置的采样分频:采样分频确定了采样率,即每秒钟进行多少次数据采样。较低的采样率可能会降低功耗,但也可能导致数据分辨率的损失。
I2C从机地址:1101000(AD0=0) 1101001(AD0=1)
3. MPU6050硬件电路



4. 代码编写
对于软件IIC的代码参考:
STM32F1之I2C通信·软件I2C代码编写-CSDN博客
对于MPU6050的代码,首先我们先创建一个宏定义,用于存放从机地址,便于以后修改:
#define MPU6050_ADDRESS 0xD0 //MPU6050的I2C从机地址然后我们基于上述链接给出的IIC的代码,初始化MPU6050:
void MPU6050_Init(void)
{
MyI2C_Init(); //先初始化底层的I2C
}4.1 MPU6050写寄存器

根据上图时序进行代码编写:
void MPU6050_WriteReg(uint8_t RegAddress, uint8_t Data)
{
MyI2C_Start(); //I2C起始
MyI2C_SendByte(MPU6050_ADDRESS); //发送从机地址,读写位为0,表示即将写入
MyI2C_ReceiveAck(); //接收应答
MyI2C_SendByte(RegAddress); //发送寄存器地址
MyI2C_ReceiveAck(); //接收应答
MyI2C_SendByte(Data); //发送要写入寄存器的数据
MyI2C_ReceiveAck(); //接收应答
MyI2C_Stop(); //I2C终止
}以上是写入单个数据,要想写入多个数据可以使用for循环来进行实现:
void MPU6050_WriteReg(uint8_t RegAddress, uint8_t *Data, uint8_t Length)
{
MyI2C_Start(); //I2C起始
MyI2C_SendByte(MPU6050_ADDRESS); //发送从机地址,读写位为0,表示即将写入
MyI2C_ReceiveAck(); //接收应答
MyI2C_SendByte(RegAddress); //发送寄存器地址
MyI2C_ReceiveAck(); //接收应答
for (uint8_t i = 0; i < Length; i++) {
MyI2C_SendByte(Data[i]); //发送要写入寄存器的数据
MyI2C_ReceiveAck(); //接收应答
}
MyI2C_Stop(); //I2C终止
}4.2 MPU6050读寄存器

根据上图时序进行代码编写:
uint8_t MPU6050_ReadReg(uint8_t RegAddress)
{
uint8_t Data;
MyI2C_Start(); //I2C起始
MyI2C_SendByte(MPU6050_ADDRESS); //发送从机地址,读写位为0,表示即将写入
MyI2C_ReceiveAck(); //接收应答
MyI2C_SendByte(RegAddress); //发送寄存器地址
MyI2C_ReceiveAck(); //接收应答
MyI2C_Start(); //I2C重复起始
MyI2C_SendByte(MPU6050_ADDRESS | 0x01); //发送从机地址,读写位为1,表示即将读取
MyI2C_ReceiveAck(); //接收应答
Data = MyI2C_ReceiveByte(); //接收指定寄存器的数据
MyI2C_SendAck(1); //发送应答,给从机非应答,终止从机的数据输出
MyI2C_Stop(); //I2C终止
return Data;
}4.3 初始化
首先我们先创建一些宏定义,将其归类了解一下:
#ifndef __MPU6050_REG_H
#define __MPU6050_REG_H
// 采样率分频寄存器
#define MPU6050_SMPLRT_DIV 0x19
// 配置寄存器
#define MPU6050_CONFIG 0x1A
// 陀螺仪配置寄存器
#define MPU6050_GYRO_CONFIG 0x1B
// 加速度计配置寄存器
#define MPU6050_ACCEL_CONFIG 0x1C
// 加速度计X轴输出高字节
#define MPU6050_ACCEL_XOUT_H 0x3B
// 加速度计X轴输出低字节
#define MPU6050_ACCEL_XOUT_L 0x3C
// 加速度计Y轴输出高字节
#define MPU6050_ACCEL_YOUT_H 0x3D
// 加速度计Y轴输出低字节
#define MPU6050_ACCEL_YOUT_L 0x3E
// 加速度计Z轴输出高字节
#define MPU6050_ACCEL_ZOUT_H 0x3F
// 加速度计Z轴输出低字节
#define MPU6050_ACCEL_ZOUT_L 0x40
// 温度输出高字节
#define MPU6050_TEMP_OUT_H 0x41
// 温度输出低字节
#define MPU6050_TEMP_OUT_L 0x42
// 陀螺仪X轴输出高字节
#define MPU6050_GYRO_XOUT_H 0x43
// 陀螺仪X轴输出低字节
#define MPU6050_GYRO_XOUT_L 0x44
// 陀螺仪Y轴输出高字节
#define MPU6050_GYRO_YOUT_H 0x45
// 陀螺仪Y轴输出低字节
#define MPU6050_GYRO_YOUT_L 0x46
// 陀螺仪Z轴输出高字节
#define MPU6050_GYRO_ZOUT_H 0x47
// 陀螺仪Z轴输出低字节
#define MPU6050_GYRO_ZOUT_L 0x48
// 电源管理1寄存器
#define MPU6050_PWR_MGMT_1 0x6B
// 电源管理2寄存器
#define MPU6050_PWR_MGMT_2 0x6C
// WHO_AM_I寄存器
#define MPU6050_WHO_AM_I 0x75
#endif
对于这些,我们初始化需要调用:
void MPU6050_Init(void)
{
MyI2C_Init(); //先初始化底层的I2C
/*MPU6050寄存器初始化,需要对照MPU6050手册的寄存器描述配置,此处仅配置了部分重要的寄存器*/
MPU6050_WriteReg(MPU6050_PWR_MGMT_1, 0x01); //电源管理寄存器1,取消睡眠模式,选择时钟源为X轴陀螺仪
MPU6050_WriteReg(MPU6050_PWR_MGMT_2, 0x00); //电源管理寄存器2,保持默认值0,所有轴均不待机
MPU6050_WriteReg(MPU6050_SMPLRT_DIV, 0x09); //采样率分频寄存器,配置采样率
MPU6050_WriteReg(MPU6050_CONFIG, 0x06); //配置寄存器,配置DLPF
MPU6050_WriteReg(MPU6050_GYRO_CONFIG, 0x18); //陀螺仪配置寄存器,选择满量程为±2000°/s
MPU6050_WriteReg(MPU6050_ACCEL_CONFIG, 0x18); //加速度计配置寄存器,选择满量程为±16g
}4.4 MPU6050获取ID号
uint8_t MPU6050_GetID(void)
{
return MPU6050_ReadReg(MPU6050_WHO_AM_I); //返回WHO_AM_I寄存器的值
}
4.5 MPU6050获取数据
void MPU6050_GetData(int16_t *AccX, int16_t *AccY, int16_t *AccZ,
int16_t *GyroX, int16_t *GyroY, int16_t *GyroZ)
{
uint8_t DataH, DataL; //定义数据高8位和低8位的变量
DataH = MPU6050_ReadReg(MPU6050_ACCEL_XOUT_H); //读取加速度计X轴的高8位数据
DataL = MPU6050_ReadReg(MPU6050_ACCEL_XOUT_L); //读取加速度计X轴的低8位数据
*AccX = (DataH << 8) | DataL; //数据拼接,通过输出参数返回
DataH = MPU6050_ReadReg(MPU6050_ACCEL_YOUT_H); //读取加速度计Y轴的高8位数据
DataL = MPU6050_ReadReg(MPU6050_ACCEL_YOUT_L); //读取加速度计Y轴的低8位数据
*AccY = (DataH << 8) | DataL; //数据拼接,通过输出参数返回
DataH = MPU6050_ReadReg(MPU6050_ACCEL_ZOUT_H); //读取加速度计Z轴的高8位数据
DataL = MPU6050_ReadReg(MPU6050_ACCEL_ZOUT_L); //读取加速度计Z轴的低8位数据
*AccZ = (DataH << 8) | DataL; //数据拼接,通过输出参数返回
DataH = MPU6050_ReadReg(MPU6050_GYRO_XOUT_H); //读取陀螺仪X轴的高8位数据
DataL = MPU6050_ReadReg(MPU6050_GYRO_XOUT_L); //读取陀螺仪X轴的低8位数据
*GyroX = (DataH << 8) | DataL; //数据拼接,通过输出参数返回
DataH = MPU6050_ReadReg(MPU6050_GYRO_YOUT_H); //读取陀螺仪Y轴的高8位数据
DataL = MPU6050_ReadReg(MPU6050_GYRO_YOUT_L); //读取陀螺仪Y轴的低8位数据
*GyroY = (DataH << 8) | DataL; //数据拼接,通过输出参数返回
DataH = MPU6050_ReadReg(MPU6050_GYRO_ZOUT_H); //读取陀螺仪Z轴的高8位数据
DataL = MPU6050_ReadReg(MPU6050_GYRO_ZOUT_L); //读取陀螺仪Z轴的低8位数据
*GyroZ = (DataH << 8) | DataL; //数据拼接,通过输出参数返回
}