重要参考:
课程链接:https://www.bilibili.com/video/BV1Ci4y1L7ZZ
讲义链接:Introduction · Autolabor-ROS机器人入门课程《ROS理论与实践》零基础教程
9.3.1 导航实现01_准备工作
1.1分布式架构
分布式架构搭建完毕且能正常运行,在PC端可以远程登陆机器人端。
1.2功能包安装
在机器人端安装导航所需功能包:
-
安装 gmapping 包(用于构建地图):
sudo apt install ros-<ROS版本>-gmapping -
安装地图服务包(用于保存与读取地图):
sudo apt install ros-<ROS版本>-map-server -
安装 navigation 包(用于定位以及路径规划):
sudo apt install ros-<ROS版本>-navigation
新建功能(包名自定义,比如:nav),并导入依赖: gmapping map_server amcl move_base
1.3机器人模型以及坐标变换
机器人的不同部件有不同的坐标系,我们需要将这些坐标系集成进同一坐标树,实现方案有两种:
- 不同的部件相对于机器人底盘其位置都是固定的,可以通过发布静态坐标变换以实现集成;
- 可以通过加载机器人URDF文件结合 robot_state_publisher、joint_state_publisher实现不同坐标系的集成。
方案1在上一章中已做演示,接下来介绍方案2的实现。
1.3.1 创建机器人模型相关的功能包
创建功能包:catkin_create_pkg mycar_description urdf xacro
1.3.2 准备机器人模型文件
在功能包下新建 urdf 目录,编写具体的 urdf 文件(机器人模型相关URDF文件的编写可以参考第6章内容),示例如下:
文件car.urdf.xacro用于集成不同的机器人部件,内容如下:
<robot name="mycar" xmlns:xacro="http://wiki.ros.org/xacro">
<xacro:include filename="car_base.urdf.xacro" />
<xacro:include filename="car_camera.urdf.xacro" />
<xacro:include filename="car_laser.urdf.xacro" />
</robot>文件car_base.urdf.xacro机器人底盘实现,内容如下:
<robot name="mycar" xmlns:xacro="http://wiki.ros.org/xacro">
<xacro:property name="footprint_radius" value="0.001" />
<link name="base_footprint">
<visual>
<geometry>
<sphere radius="${footprint_radius}" />
</geometry>
</visual>
</link>
<xacro:property name="base_radius" value="0.1" />
<xacro:property name="base_length" value="0.08" />
<xacro:property name="lidi" value="0.015" />
<xacro:property name="base_joint_z" value="${base_length / 2 + lidi}" />
<link name="base_link">
<visual>
<geometry>
<cylinder radius="0.1" length="0.08" />
</geometry>
<origin xyz="0 0 0" rpy="0 0 0" />
<material name="baselink_color">
<color rgba="1.0 0.5 0.2 0.5" />
</material>
</visual>
</link>
<joint name="link2footprint" type="fixed">
<parent link="base_footprint" />
<child link="base_link" />
<origin xyz="0 0 0.055" rpy="0 0 0" />
</joint>
<xacro:property name="wheel_radius" value="0.0325" />
<xacro:property name="wheel_length" value="0.015" />
<xacro:property name="PI" value="3.1415927" />
<xacro:property name="wheel_joint_z" value="${(base_length / 2 + lidi - wheel_radius) * -1}" />
<xacro:macro name="wheel_func" params="wheel_name flag">
<link name="${wheel_name}_wheel">
<visual>
<geometry>
<cylinder radius="${wheel_radius}" length="${wheel_length}" />
</geometry>
<origin xyz="0 0 0" rpy="${PI / 2} 0 0" />
<material name="wheel_color">
<color rgba="0 0 0 0.3" />
</material>
</visual>
</link>
<joint name="${wheel_name}2link" type="continuous">
<parent link="base_link" />
<child link="${wheel_name}_wheel" />
<origin xyz="0 ${0.1 * flag} ${wheel_joint_z}" rpy="0 0 0" />
<axis xyz="0 1 0" />
</joint>
</xacro:macro>
<xacro:wheel_func wheel_name="left" flag="1" />
<xacro:wheel_func wheel_name="right" flag="-1" />
<xacro:property name="small_wheel_radius" value="0.0075" />
<xacro:property name="small_joint_z" value="${(base_length / 2 + lidi - small_wheel_radius) * -1}" />
<xacro:macro name="small_wheel_func" params="small_wheel_name flag">
<link name="${small_wheel_name}_wheel">
<visual>
<geometry>
<sphere radius="${small_wheel_radius}" />
</geometry>
<origin xyz="0 0 0" rpy="0 0 0" />
<material name="wheel_color">
<color rgba="0 0 0 0.3" />
</material>
</visual>
</link>
<joint name="${small_wheel_name}2link" type="continuous">
<parent link="base_link" />
<child link="${small_wheel_name}_wheel" />
<origin xyz="${0.08 * flag} 0 ${small_joint_z}" rpy="0 0 0" />
<axis xyz="0 1 0" />
</joint>
</xacro:macro >
<xacro:small_wheel_func small_wheel_name="front" flag="1"/>
<xacro:small_wheel_func small_wheel_name="back" flag="-1"/>
</robot>文件car_camera.urdf.xacro机器人摄像头实现,内容如下:
<robot name="mycar" xmlns:xacro="http://wiki.ros.org/xacro">
<xacro:property name="camera_length" value="0.02" />
<xacro:property name="camera_width" value="0.05" />
<xacro:property name="camera_height" value="0.05" />
<xacro:property name="joint_camera_x" value="0.08" />
<xacro:property name="joint_camera_y" value="0" />
<xacro:property name="joint_camera_z" value="${base_length / 2 + camera_height / 2}" />
<link name="camera">
<visual>
<geometry>
<box size="${camera_length} ${camera_width} ${camera_height}" />
</geometry>
<origin xyz="0 0 0" rpy="0 0 0" />
<material name="black">
<color rgba="0 0 0 0.8" />
</material>
</visual>
</link>
<joint name="camera2base" type="fixed">
<parent link="base_link" />
<child link="camera" />
<origin xyz="${joint_camera_x} ${joint_camera_y} ${joint_camera_z}" rpy="0 0 0" />
</joint>
</robot>文件car_laser.urdf.xacro机器人雷达实现,内容如下:
<robot name="mycar" xmlns:xacro="http://wiki.ros.org/xacro">
<xacro:property name="support_radius" value="0.01" />
<xacro:property name="support_length" value="0.15" />
<xacro:property name="laser_radius" value="0.03" />
<xacro:property name="laser_length" value="0.05" />
<xacro:property name="joint_support_x" value="0" />
<xacro:property name="joint_support_y" value="0" />
<xacro:property name="joint_support_z" value="${base_length / 2 + support_length / 2}" />
<xacro:property name="joint_laser_x" value="0" />
<xacro:property name="joint_laser_y" value="0" />
<xacro:property name="joint_laser_z" value="${support_length / 2 + laser_length / 2}" />
<link name="support">
<visual>
<geometry>
<cylinder radius="${support_radius}" length="${support_length}" />
</geometry>
<material name="yellow">
<color rgba="0.8 0.5 0.0 0.5" />
</material>
</visual>
</link>
<joint name="support2base" type="fixed">
<parent link="base_link" />
<child link="support"/>
<origin xyz="${joint_support_x} ${joint_support_y} ${joint_support_z}" rpy="0 0 0" />
</joint>
<link name="laser">
<visual>
<geometry>
<cylinder radius="${laser_radius}" length="${laser_length}" />
</geometry>
<material name="black">
<color rgba="0 0 0 0.5" />
</material>
</visual>
</link>
<joint name="laser2support" type="fixed">
<parent link="support" />
<child link="laser"/>
<origin xyz="${joint_laser_x} ${joint_laser_y} ${joint_laser_z}" rpy="0 0 0" />
</joint>
</robot>1.3.3 在launch文件加载机器人模型
launch 文件(文件名称自定义,比如:car.launch)内容示例如下:
<launch>
<param name="robot_description" command="$(find xacro)/xacro $(find mycar_description)/urdf/car.urdf.xacro" />
<node pkg="joint_state_publisher" name="joint_state_publisher" type="joint_state_publisher" />
<node pkg="robot_state_publisher" name="robot_state_publisher" type="robot_state_publisher" />
</launch>为了使用方便,还可以将该文件包含进启动机器人的launch文件中,示例如下:
<launch>
<include file="$(find ros_arduino_python)/launch/arduino.launch" />
<include file="$(find usb_cam)/launch/usb_cam-test.launch" />
<include file="$(find rplidar_ros)/launch/rplidar.launch" />
<!-- 机器人模型加载文件 -->
<include file="$(find mycar_description)/launch/car.launch" />
</launch>1.4结果演示
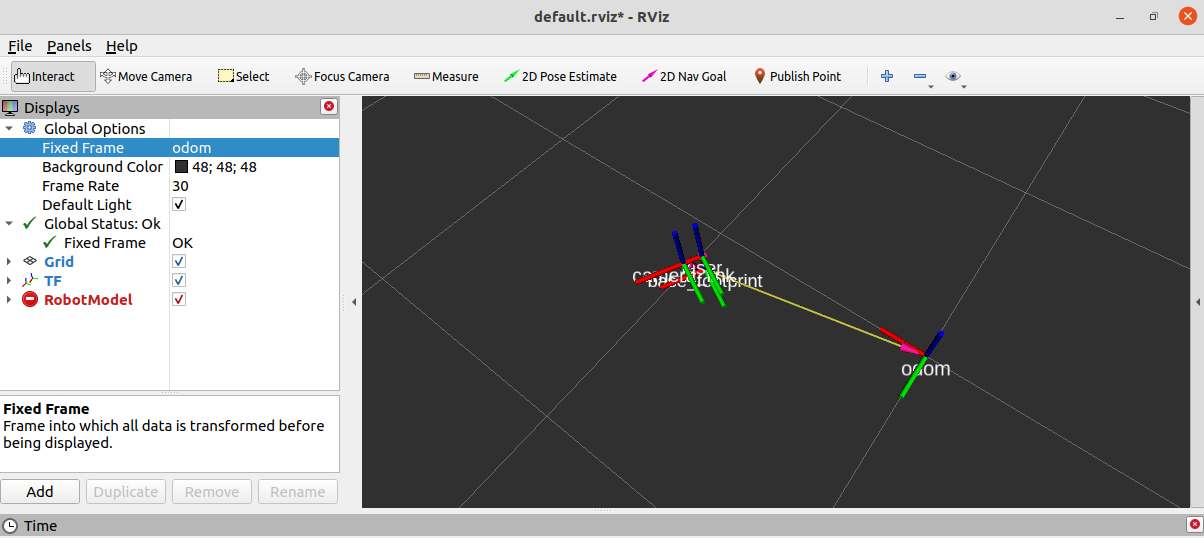
不使用机器人模型时,机器人端启动机器人(使用包含TF坐标换的launch文件),从机端启动rviz,在rviz中添加RobotModel与TF组件,rviz中结果(此时显示机器人模型异常,且TF中只有代码中发布的坐标变换):
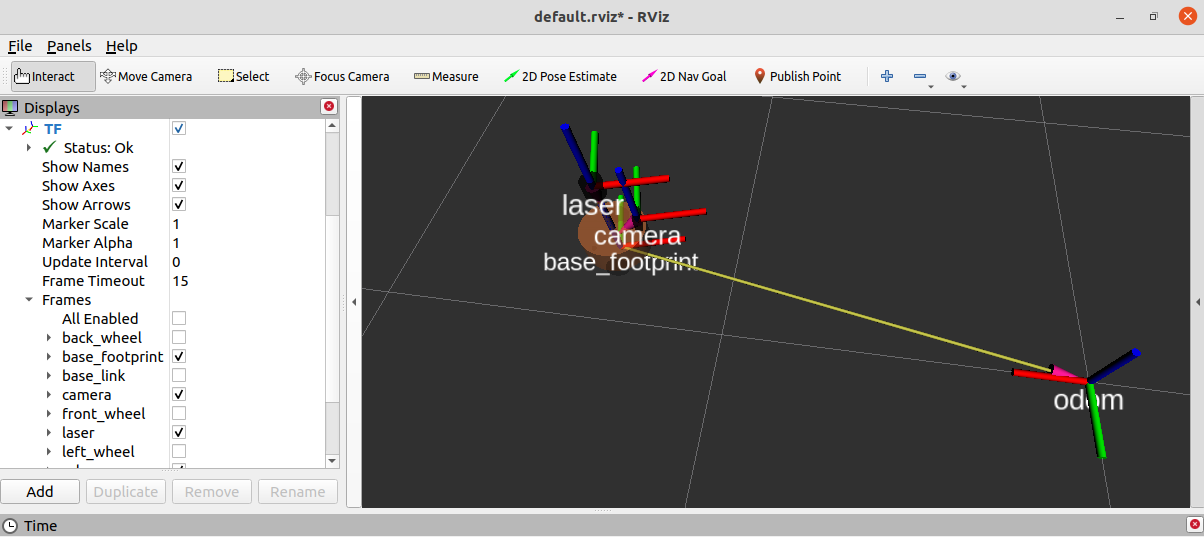
使用机器人模型时,机器人端加载机器人模型(执行上一步的launch文件)且启动机器人,从机端启动rviz,在rviz中添加RobotModel与TF组件rviz中结果(此时显示机器人模型,且TF坐标变换正常):
后续,在导航时使用机器人模型。