使用决策树训练红酒数据集
完整代码:
import numpy as np
import matplotlib.pyplot as plt
from matplotlib.colors import ListedColormap
from sklearn import tree, datasets
from sklearn.model_selection import train_test_split
# 准备数据,这里使用前两个特征
data = datasets.load_wine()
X, y = data.data[:,:2], data.target
X_train, X_test, y_train, y_test = train_test_split(X, y)
# 训练模型
clf = tree.DecisionTreeClassifier(max_depth=1)
clf.fit(X, y)
print(clf.score(X_test, y_test))
输出:
0.7555555555555555
绘制决策树的图形
完整代码:
import numpy as np
import matplotlib.pyplot as plt
from matplotlib.colors import ListedColormap
from sklearn import tree, datasets
from sklearn.model_selection import train_test_split
# 准备数据,这里使用前两个特征
data = datasets.load_wine()
X, y = data.data[:,:2], data.target
X_train, X_test, y_train, y_test = train_test_split(X, y)
# 训练模型
clf = tree.DecisionTreeClassifier(max_depth=1)
clf.fit(X, y)
# 画图
cmap_light = ListedColormap(["#FFAAAA", "#AAFFAA", "#AAAAFF"])
cmap_bold = ListedColormap(["#FF0000", "#00FF00", "#0000FF"])
x_min, x_max = X_train[:,0].min() - 1, X_train[:,0].max() + 1
y_min, y_max = X_train[:,1].min() - 1, X_train[:,1].max() + 1
xx, yy = np.meshgrid(np.arange(x_min, x_max, .02), np.arange(y_min, y_max, .02))
z = clf.predict(np.c_[xx.ravel(), yy.ravel()]).reshape(xx.shape)
plt.figure()
plt.pcolormesh(xx, yy, z, cmap=cmap_light)
plt.scatter(X[:, 0], X[:, 1], c=y, cmap=cmap_bold, edgecolor="k", s=20)
plt.xlim(xx.min(), xx.max())
plt.ylim(yy.min(), yy.max())
plt.title("Classifier: (max_depth = 1)")
plt.show()
输出:
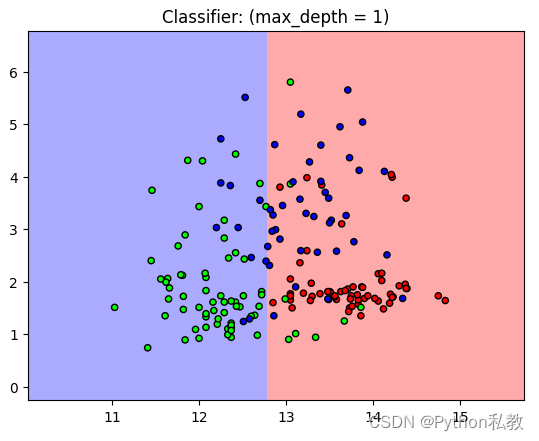
从结果来看,分类器的表现并不是特别好,我们可以加大深度试试。
调整决策树的深度
完整代码:
import numpy as np
import matplotlib.pyplot as plt
from matplotlib.colors import ListedColormap
from sklearn import tree, datasets
from sklearn.model_selection import train_test_split
# 准备数据,这里使用前两个特征
data = datasets.load_wine()
X, y = data.data[:,:2], data.target
X_train, X_test, y_train, y_test = train_test_split(X, y)
# 训练模型
clf = tree.DecisionTreeClassifier(max_depth=3)
clf.fit(X, y)
print(clf.score(X_test, y_test))
# 画图
cmap_light = ListedColormap(["#FFAAAA", "#AAFFAA", "#AAAAFF"])
cmap_bold = ListedColormap(["#FF0000", "#00FF00", "#0000FF"])
x_min, x_max = X_train[:,0].min() - 1, X_train[:,0].max() + 1
y_min, y_max = X_train[:,1].min() - 1, X_train[:,1].max() + 1
xx, yy = np.meshgrid(np.arange(x_min, x_max, .02), np.arange(y_min, y_max, .02))
z = clf.predict(np.c_[xx.ravel(), yy.ravel()]).reshape(xx.shape)
plt.figure()
plt.pcolormesh(xx, yy, z, cmap=cmap_light)
plt.scatter(X[:, 0], X[:, 1], c=y, cmap=cmap_bold, edgecolor="k", s=20)
plt.xlim(xx.min(), xx.max())
plt.ylim(yy.min(), yy.max())
plt.title("Classifier: (max_depth = 3)")
plt.show()
输出:
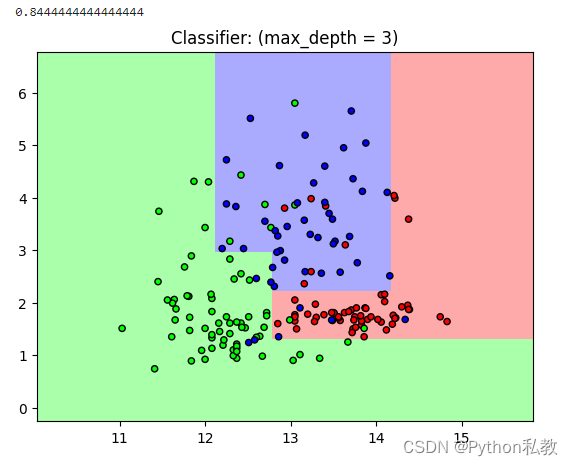
从结果来看,分数变成了0.84,已经是一个比较能够接受的分数了。
另外,从图像来看,不同的点大致都能落入到自己的区域中,相比深度为1的时候更加的准确一点。
继续加大决策树的深度
完整代码:
import numpy as np
import matplotlib.pyplot as plt
from matplotlib.colors import ListedColormap
from sklearn import tree, datasets
from sklearn.model_selection import train_test_split
# 准备数据,这里使用前两个特征
data = datasets.load_wine()
X, y = data.data[:,:2], data.target
X_train, X_test, y_train, y_test = train_test_split(X, y)
# 训练模型
clf = tree.DecisionTreeClassifier(max_depth=5)
clf.fit(X, y)
print(clf.score(X_test, y_test))
# 画图
cmap_light = ListedColormap(["#FFAAAA", "#AAFFAA", "#AAAAFF"])
cmap_bold = ListedColormap(["#FF0000", "#00FF00", "#0000FF"])
x_min, x_max = X_train[:,0].min() - 1, X_train[:,0].max() + 1
y_min, y_max = X_train[:,1].min() - 1, X_train[:,1].max() + 1
xx, yy = np.meshgrid(np.arange(x_min, x_max, .02), np.arange(y_min, y_max, .02))
z = clf.predict(np.c_[xx.ravel(), yy.ravel()]).reshape(xx.shape)
plt.figure()
plt.pcolormesh(xx, yy, z, cmap=cmap_light)
plt.scatter(X[:, 0], X[:, 1], c=y, cmap=cmap_bold, edgecolor="k", s=20)
plt.xlim(xx.min(), xx.max())
plt.ylim(yy.min(), yy.max())
plt.title("Classifier: (max_depth = 5)")
plt.show()
输出:
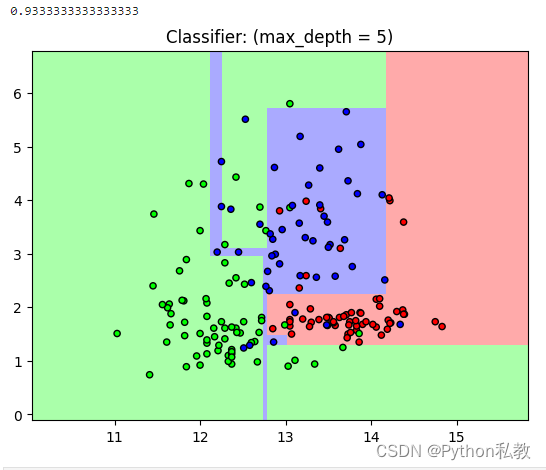
从结果来看,分数从0.84变成了0.93,明显更加的准确了。




![[STM32-HAL库]AS608-指纹识别模块-STM32CUBEMX开发-HAL库开发系列-主控STM32F103C8T6](https://img-blog.csdnimg.cn/direct/14275104e38145d3884a69fc6c51f07c.png)




![[实例] Unity Shader 逐像素漫反射与半兰伯特光照](https://img-blog.csdnimg.cn/direct/0098a63f439043e5b5920a77726734df.gif)