stm32f407 高级定时1、定时8 生成20k 中心PWM 波形 并分别用其通道4 触发ADC1 ADC2 采样 用于分别两无刷电机foc 电流环控制,ADC1产生50us的电流采集完成中断,用于foc算法周期运算
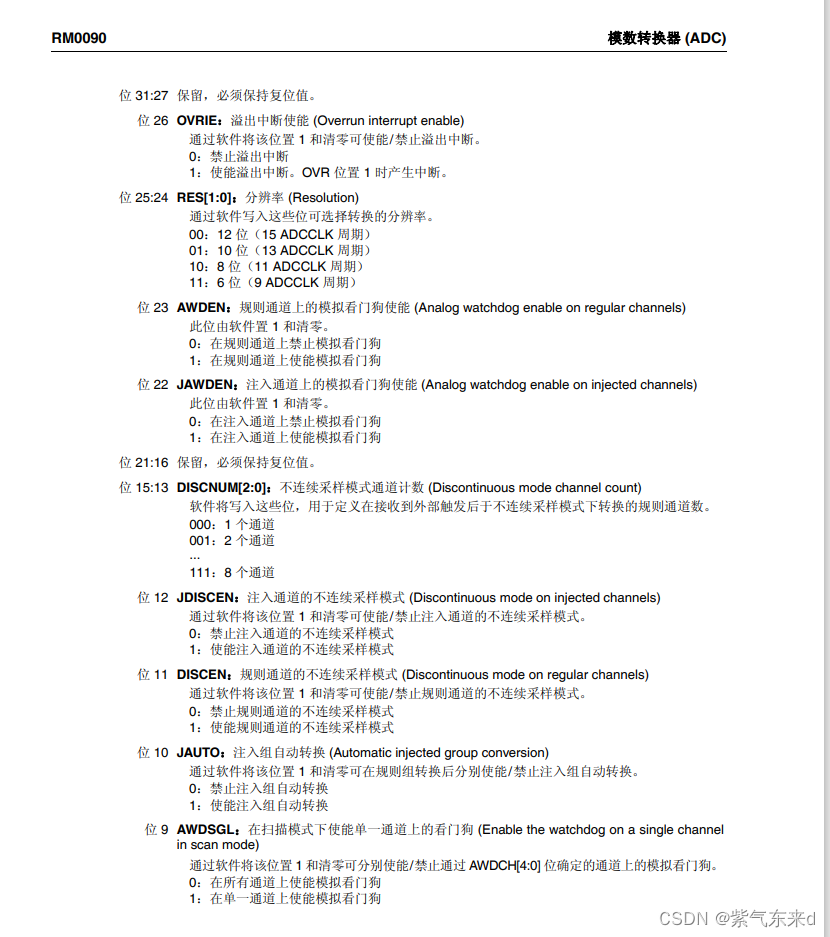
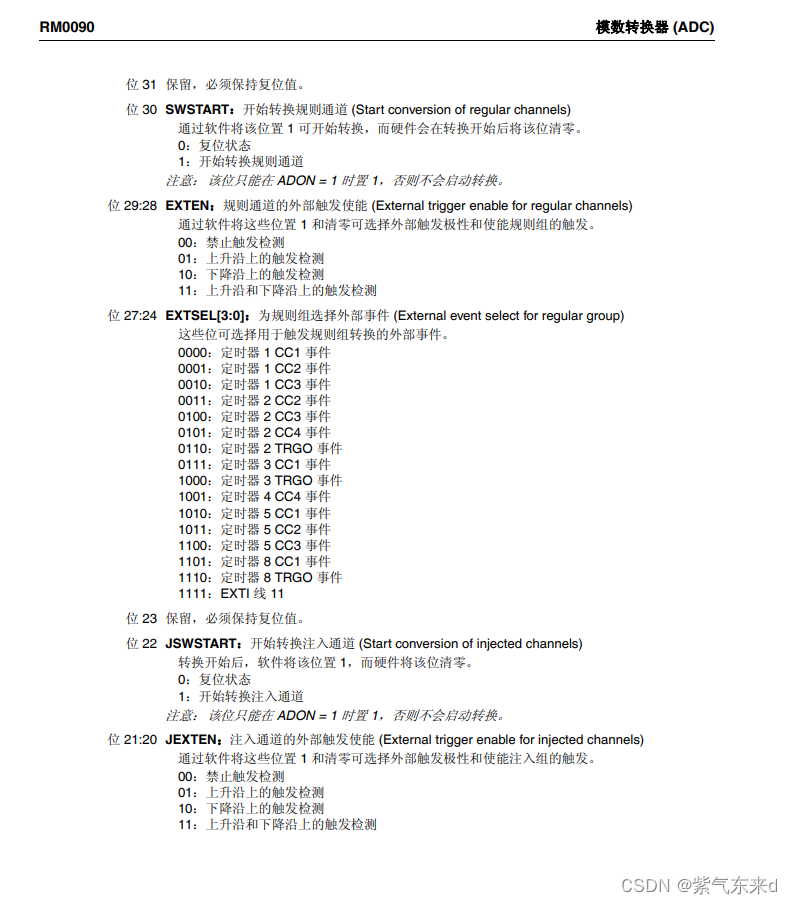
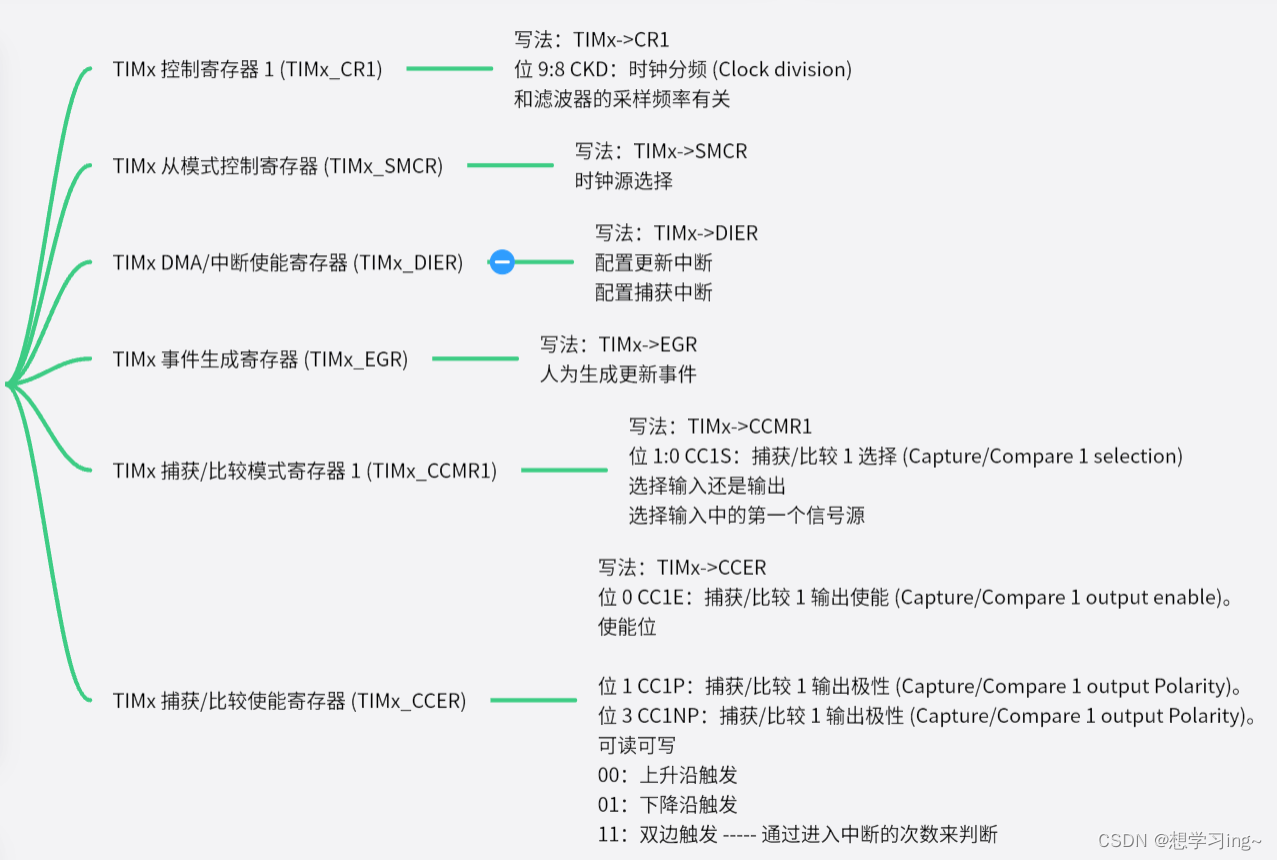
主要参考高级定时器的寄存器和ADC寄存器
首先,要使用STM32F407的高级定时器1和定时器8生成20kHz的中心PWM波形,你需要进行以下步骤:
-
配置时钟:使能GPIO和相应的定时器时钟。
-
配置GPIO:选择用于输出PWM的引脚,并将这些引脚配置为复用功能。
-
配置定时器:对定时器1和定时器8进行相应的配置,使其能够生成PWM信号。
- 配置定时器的基本参数:将定时器的模式设置为PWM模式。
- 配置定时器的时钟分频器。
- 配置定时器的周期值,并设置PWM信号的占空比。
-
配置ADC:使能ADC1和ADC2的时钟,并对它们进行相应的配置。
- 配置ADC的时钟分频器。
- 配置ADC的模式:选择连续模式,使得它们能够不间断地进行采样。
- 配置ADC的触发源:选择定时器的通道4作为触发源。
-
配置ADC中断:使能ADC1的转换完成中断,并编写中断处理函数。在中断处理函数中进行foc算法的周期运算。
-
启动定时器和ADC
#include <string.h>
#include <MCU_HAL.h> //for downlayer interface include the CHAL port
#include "CHAL_Config.h" //
#define TIM_1_8_CLOCK_HZ 168000000
// #define TIM_1_8_PERIOD_CLOCKS 3500 //24k
#define TIM_1_8_PERIOD_CLOCKS 4199 // 20k
#define TIM_1_8_DEADTIME_CLOCKS 20
#define TIM_APB1_CLOCK_HZ 84000000
#define TIM_APB1_PERIOD_CLOCKS 4096
#define TIM_APB1_DEADTIME_CLOCKS 40
#define TIM_1_8_RCR 2
static void MX_ADC1_Init(void);
static void MX_ADC2_Init(void);
void CHAL_Pwm1Init(char *HIVersion, uint32_t runFreq, uint32_t deadTime, uint32_t sampHalfTime)
{
uint32_t pwmTiks = CPUFREQ / 2 / runFreq;
uint8_t deadTiks = deadTime / CPURATE;
// 使能TIM1时钟
RCC->APB2ENR |= 1 << 0;
// 配置TIM1基本设置
TIM1->CR1 = 0;
TIM1->CR1 |= (1 << 5); // 中心对齐模式 1 递减时产生
TIM1->CR1 |= (1 << 0); // 使能计数器
// TIM1->CR1 |= TIM_CR1_ARPE; // 自动重载预装载使能
// TIM1->CR1 |= TIM_CR1_CKD_0; // 时钟分频因子 = /1
// 设置预分频器和周期
TIM1->PSC = 0; // 预分频器 = 0
TIM1->ARR = pwmTiks; // 周期
// 重复计数器设置(如适用)
TIM1->RCR = TIM_1_8_RCR;
// 配置时钟源
TIM1->CR2 = 0;
// TIM1->CR2 |= TIM_CR2_MMS_1; // 主模式选择:更新事件产生TRGO
TIM1->CCMR1 = 0;
TIM1->CCMR1 |= 7 << 4; // PWM模式
TIM1->CCMR1 |= 1 << 3; // 输出比较预装载使能
TIM1->CCMR1 |= 7 << 12; // PWM模式
TIM1->CCMR1 |= 1 << 11; // 输出比较预装载使能8 重复计数器8 重复计数器寄存器 (TIMx_RCR)寄存器 (TIMx_RCR)
TIM1->CCMR2 = 0;
TIM1->CCMR1 = 0;
TIM1->CCMR2 |= 7 << 4; // PWM模式
TIM1->CCMR2 |= 1 << 3; // 输出比较预装载使能
TIM1->CCMR2 |= 7 << 12; // PWM模式
TIM1->CCMR2 |= 1 << 11; // 输出比较预装载使能
// 设置初始脉冲值(通道1、2、3)
TIM1->CCR1 = 0;
TIM1->CCR2 = 0;
TIM1->CCR3 = 0;
TIM1->CCR4 = 1;
// 设置极性(通道1、2、3)
TIM1->CCER = 0;
/* 0 1 2 3 */
/* CCE=1 CCP=0 CCNE=1 CCPN=0 */
/* 0x5 */
TIM1->CCER |= 5 << 0; // 通道1
TIM1->CCER |= 5 << 4; // 通道2
TIM1->CCER |= 5 << 8; // 通道3
TIM1->CCER |= 1 << 12; // 通道4 极性高
// 断开与死区时间配置
TIM1->BDTR = deadTiks; // 最大不超过255 tick
TIM1->BDTR |= 1 << 15; // 输出使能
/* gpio 初始化 */
RCC->AHB1ENR |= 1 << 0; // 使能PORTA口时钟
RCC->AHB1ENR |= 1 << 1; // 使能PORTB口时钟
GPIO_Set(GPIOA, PIN8 | PIN9 | PIN10, GPIO_MODE_AF, GPIO_OTYPE_PP, GPIO_SPEED_50M,
GPIO_PUPD_PD); // PA9,PA10,复用功能,上拉输出
GPIO_AF_Set(GPIOA, 8, 1); // PA8,AF1
GPIO_AF_Set(GPIOA, 9, 1); // PA8,AF1
GPIO_AF_Set(GPIOA, 10, 1); // PA8,AF1
GPIO_Set(GPIOB, PIN13 | PIN14 | PIN15, GPIO_MODE_AF, GPIO_OTYPE_PP, GPIO_SPEED_50M,
GPIO_PUPD_PD); // PA9,PA10,复用功能,上拉输出
GPIO_AF_Set(GPIOB, 13, 1); // PA8,AF1
GPIO_AF_Set(GPIOB, 14, 1); // PA8,AF1
GPIO_AF_Set(GPIOB, 15, 1); // PA8,AF1
MX_ADC1_Init();
}
void CHAL_M1_DisPwm123(void) { TIM1->CCER = 0x1000; }
void CHAL_M1_EnaPwm123(void) { TIM1->CCER = 0x1555; }
void CHAL_Pwm2Init(char *HIVersion, uint32_t runFreq, uint32_t deadTime, uint32_t sampHalfTime)
{
uint32_t pwmTiks = CPUFREQ / 2 / runFreq;
uint8_t deadTiks = deadTime / CPURATE;
// 使能TIM2时钟
RCC->APB2ENR |= 1 << 1;
// 配置TIM2基本设置
TIM8->CR1 = 0;
TIM8->CR1 |= (1 << 5); // 中心对齐模式 1 递减时产生
TIM8->CR1 |= (1 << 0); // 使能计数器
// TIM8->CR1 |= TIM_CR1_ARPE; // 自动重载预装载使能
// TIM8->CR1 |= TIM_CR1_CKD_0; // 时钟分频因子 = /1
// 设置预分频器和周期
TIM8->PSC = 0; // 预分频器 = 0
TIM8->ARR = pwmTiks; // 周期
// 重复计数器设置(如适用)
TIM8->RCR = TIM_1_8_RCR;
// 配置时钟源
TIM8->CR2 = 0;
// TIM8->CR2 |= TIM_CR2_MMS_1; // 主模式选择:更新事件产生TRGO
// PWM模式配置(通道1、2、3)
TIM8->CCMR1 = 0;
TIM8->CCMR1 |= 7 << 4; // PWM模式
TIM8->CCMR1 |= 1 << 3; // 输出比较预装载使能
TIM8->CCMR1 |= 7 << 12; // PWM模式
TIM8->CCMR1 |= 1 << 11; // 输出比较预装载使能
TIM8->CCMR2 = 0;
TIM8->CCMR2 |= 7 << 4; // PWM模式
TIM8->CCMR2 |= 1 << 3; // 输出比较预装载使能
TIM8->CCMR2 |= 7 << 12; // PWM模式
TIM8->CCMR2 |= 1 << 11; // 输出比较预装载使能
// 设置初始脉冲值(通道1、2、3)
TIM8->CCR1 = 0;
TIM8->CCR2 = 0;
TIM8->CCR3 = 0;
TIM8->CCR4 = 1;
// 设置极性(通道1、2、3)
TIM8->CCER = 0;
/* 0 1 2 3 */
/* CCE=1 CCP=0 CCNE=1 CCPN=0 */
/* 0x5 */
TIM8->CCER |= 5 << 0; // 通道1
TIM8->CCER |= 5 << 4; // 通道2
TIM8->CCER |= 5 << 8; // 通道3
TIM8->CCER |= 1 << 12; // 通道4 极性高
// 断开与死区时间配置
TIM8->BDTR = deadTiks; // 最大不超过255 tick
TIM8->BDTR |= 1 << 15; // 输出使能
/* gpio 初始化 */
RCC->AHB1ENR |= 1 << 0; // 使能PORTA口时钟
RCC->AHB1ENR |= 1 << 1; // 使能PORTB口时钟
RCC->AHB1ENR |= 1 << 2; // 使能PORTc口时钟
GPIO_Set(GPIOA, PIN7, GPIO_MODE_AF, GPIO_OTYPE_PP, GPIO_SPEED_50M,
GPIO_PUPD_PD); // PA9,PA10,复用功能,上拉输出
GPIO_AF_Set(GPIOA, 7, 3); // PA8,AF3
GPIO_Set(GPIOB, PIN0 | PIN1 | PIN15, GPIO_MODE_AF, GPIO_OTYPE_PP, GPIO_SPEED_50M,
GPIO_PUPD_PD); // PA9,PA10,复用功能,上拉输出
GPIO_AF_Set(GPIOB, 0, 3); // PA8,AF1
GPIO_AF_Set(GPIOB, 1, 3); // PA8,AF1
GPIO_Set(GPIOC, PIN6 | PIN7 | PIN8, GPIO_MODE_AF, GPIO_OTYPE_PP, GPIO_SPEED_50M,
GPIO_PUPD_PD); // PA9,PA10,复用功能,上拉输出
GPIO_AF_Set(GPIOC, 6, 3); // PA8,AF1
GPIO_AF_Set(GPIOC, 7, 3); // PA8,AF1
GPIO_AF_Set(GPIOC, 8, 3); // PA8,AF1
MX_ADC2_Init();
}
void CHAL_M2_DisPwm123(void) { TIM8->CCER = 0x1000; }
void CHAL_M2_EnaPwm123(void) { TIM8->CCER = 0x1555; }
/**
* @brief ADC1 初始化函数
* @param 无
* @retval 无
*/
static void MX_ADC1_Init(void)
{
// 使能ADC1时钟
RCC->APB2ENR |= 1 << 8;
// ADC1->CR1 = 0x180;
ADC1->CR1 |= 1 << 8; // 使能扫描模式
ADC1->CR1 |= 1 << 7; // 注入通道中断完成中断使能
ADC1->CR2 = 0;
ADC1->CR2 |= 1 << 10; // ADC 使能
ADC1->CR2 |= 2 << 20; // 下降沿触发 注入通道检测
ADC1->CR2 |= 0 << 16; // 注入通道 TIM1 CC4 事件
ADC1->CR2 |= 1 << 0; // ADC 使能
ADC1->HTR = 0x0FFF;
// ADC1->CR2 = 0x0200401;
ADC1->HTR = 0x0FFF;
ADC1->JSQR = 0;
ADC1->JSQR |= 1 << 20; // 注入通道序列长度:2
ADC1->JSQR |= (10 << 10); // 注入通道3 对应 adc 通道
ADC1->JSQR |= (11 << 15); // 注入通道4
ADC1->SMPR1 = 0;
ADC1->SMPR1 |= 0 << 0; // 注入通道8采样时间: 3个周期
ADC1->SMPR1 |= 0 << 3; // 注入通道12采样时间:3个周期
RCC->AHB1ENR |= 1 << 2; // 使能PORTC口时钟
GPIO_Set(GPIOC, PIN0 | PIN1, GPIO_MODE_AIN, 0, 0, GPIO_PUPD_PU); //
// // 启动ADC1
MY_NVIC_Init(0, 0, ADC_IRQn, 0); // 抢占1,子优先级3,组2
}
/**
* @brief ADC2 初始化函数
* @param 无
* @retval 无
*/
static void MX_ADC2_Init(void)
{
// 使能ADC2时钟
RCC->APB2ENR |= 1 << 9;
// ADC2->CR1 = 0x180;
ADC2->CR1 = 0;
ADC2->CR1 |= 1 << 8; // 使能扫描模式
ADC2->CR2 = 0;
ADC2->CR2 |= 1 << 10; // ADC 使能
ADC2->CR2 |= 2 << 20; // 下降沿触发 注入通道检测
ADC2->CR2 |= 0xe << 16; // 注入通道 TIM8 CC4 事件
ADC2->CR2 |= 1 << 0; // ADC 使能
ADC2->HTR = 0x0FFF;
// // // 配置注入通道(通道8、12、6、13)
ADC2->JSQR = 0;
ADC2->JSQR |= 1 << 20; // 注入通道序列长度:2
ADC2->JSQR |= (12 << 10); // 注入通道3
ADC2->JSQR |= (13 << 15); // 注入通道4
ADC2->SMPR1 = 0;
ADC2->SMPR1 |= 0 << 0; // 注入通道8采样时间: 3个周期
ADC2->SMPR1 |= 0 << 3; // 注入通道12采样时间:3个周期
RCC->AHB1ENR |= 1 << 2; // 使能PORTC口时钟
GPIO_Set(GPIOC, PIN2 | PIN3, GPIO_MODE_AIN, 0, 0, GPIO_PUPD_PU); //
}