文章目录
- 1.项目地址
- 2.Ymodem 协议介绍
- 3.文件传输过程
- 4.使用
- 5.SecureCRT 软件也支持Ymodem
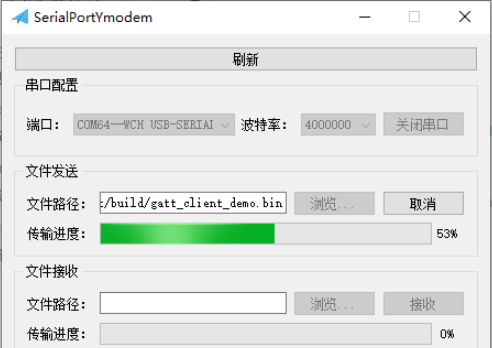
- 6.基于PyQt5的Ymodem界面实现案例
1.项目地址
https://github.com/XinLiGH/SerialPortYmodem
基于VS2019 Qt5.15.2 编译,Linux下编译也可以,这里不做说明。
2.Ymodem 协议介绍
YModem 协议是由 XModem 协议演变而来的,每包数据可以达到 1024 字节,是一个非常高效的文件传输协议。我们平常所说的 Ymodem 协议是指的 Ymodem-1K,除此还有 Ymodem-g(没有 CRC 校验,不常用)。YModem-1K 协议用 1024 字节数据帧传输取代了标准的 128 字节数据帧传输,发送的数据会使用 CRC 校验,保证数据传输的正确性。它每传输一个信息块时,就会等待接收端返回 ACK 信号,接收到响应信号后,才会继续传输下一个信息块,从而保证能够接收到全部数据。
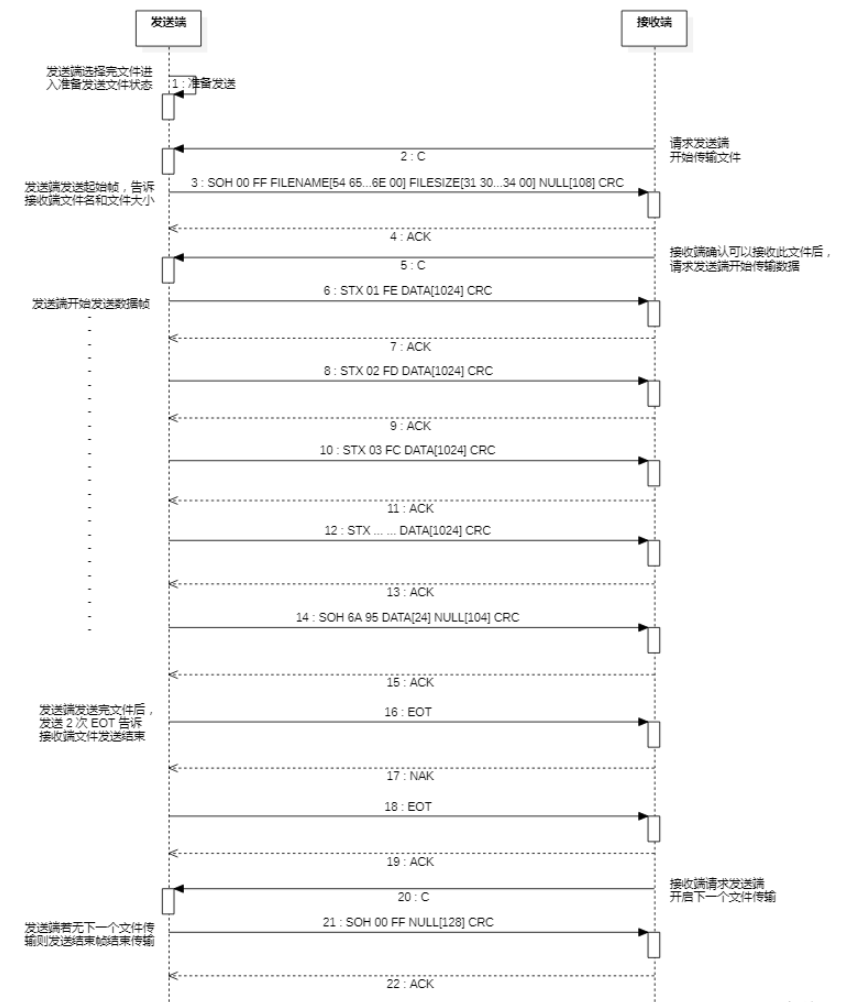
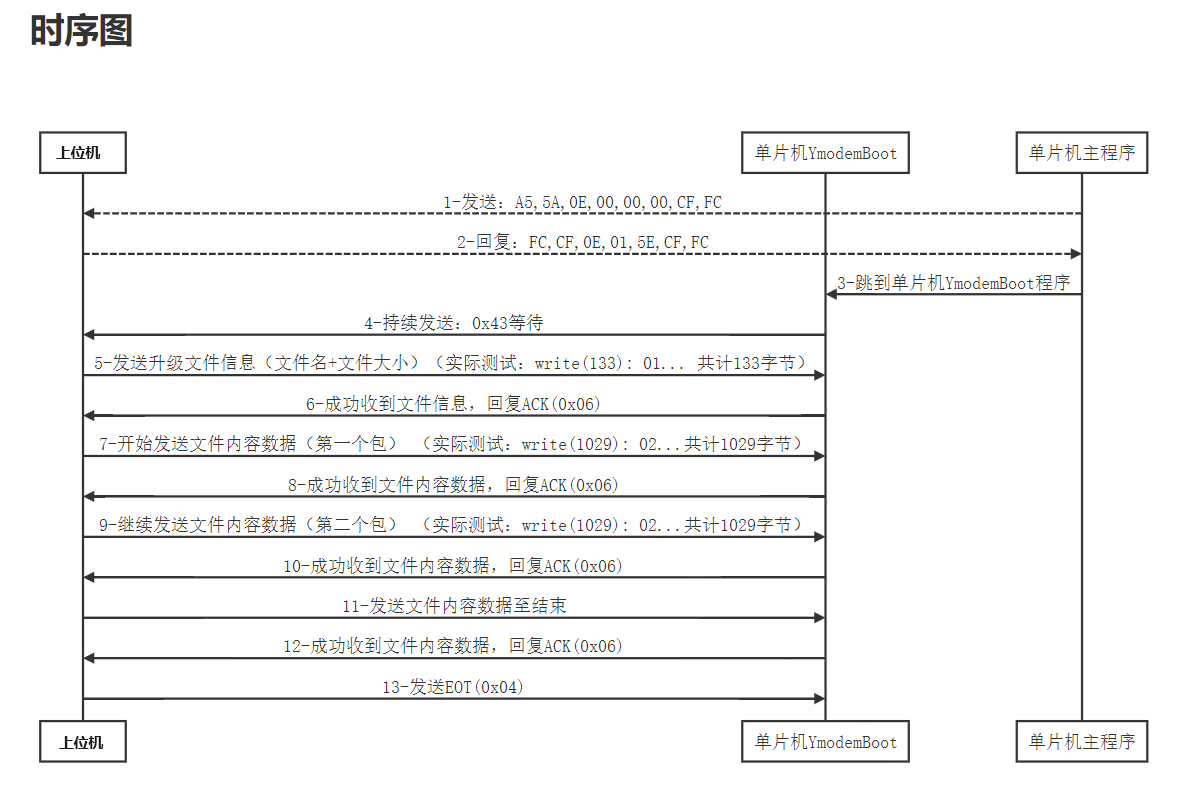
3.文件传输过程
通常单片机程序是运行在主程序下的(单片机主程序不支持YModem),我这里由Qt上位机通过串口发送一条自定义的协议告诉单片机,进入升级模式。接着就是下图的流程:
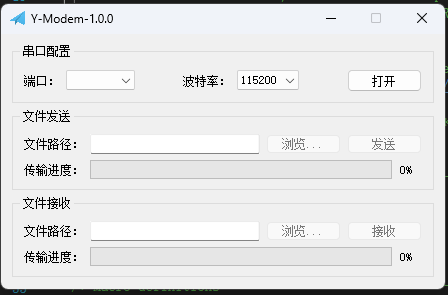
4.使用
5.SecureCRT 软件也支持Ymodem
6.基于PyQt5的Ymodem界面实现案例
基于PyQt5做一些小工具真的很方便,大家感兴趣可以尝试下!
#coding=utf-8
from tkinter import *
from tkinter.ttk import Combobox
from tkinter import filedialog
from tkinter import messagebox
from ctypes import *
import serial.tools.list_ports
import threading
from ymodem import YMODEM
import os
from time import sleep
app = Tk()
comportbox=Combobox(app,width = 7, height = 10)
baudratebox=Combobox(app,width = 8, height = 10)
red_canvas = Canvas(app, width=50, height=50,bg="red")
green_canvas = Canvas(app, width=50, height=50,bg="green")
progress_bar = Canvas(app, width = 350,height = 26,bg = "white")
fill_line = progress_bar.create_rectangle(2,2,0,27,width = 0,fill = "green")
ser = serial.Serial(bytesize=8, parity='N', stopbits=1, timeout=1, write_timeout=3)
linsten_lock = threading.Lock()
need_listen = 0
exit_listen = False
def upgrade_callback(total_packets,file_size,file_name):
if len(progress_bar.gettags("text")) == 0:
progress_bar.create_text(175, 15, text=file_name, tags="text")
progress = total_packets*350/(file_size/1024)
progress_bar.coords(fill_line, (0, 0, progress, 30))
def set_connect_logo(is_connected = True):
if is_connected:
red_canvas.place_forget()
green_canvas.place(x=100,y=60)
comportbox.configure(state='disabled')
baudratebox.configure(state='disabled')
else:
green_canvas.place_forget()
red_canvas.place(x=100,y=60)
comportbox.configure(state='enabled')
baudratebox.configure(state='enabled')
def listen_connect_thread():
global ser
global need_listen
global exit_listen
global linsten_lock
while exit_listen == False:
linsten_lock.acquire()
if need_listen == 0:
linsten_lock.release()
sleep(1)
continue
else:
com_number = comportbox.get()
port_found = 0
plist = list(serial.tools.list_ports.comports())
if len(plist) <= 0:
if ser.is_open == True:
ser.close()
set_connect_logo(False)
else:
for item in plist:
if com_number == item[0]:
port_found = 1
break
if port_found == 0:
if ser.is_open == True:
ser.close()
set_connect_logo(False)
else:
if ser.is_open == False:
try:
ser.port = com_number
ser.open()
set_connect_logo(True)
except Exception as e:
print(e)
pass
linsten_lock.release()
sleep(0.3)
continue
def connect():
global need_listen
global ser
com_number = comportbox.get()
port_found = 0
plist = list(serial.tools.list_ports.comports())
if ser.is_open == True:
messagebox.showinfo(title="Error", message="Already connected!")
return
if len(plist) <= 0:
messagebox.showinfo(title="Error", message="No available serial!")
need_listen = 0
set_connect_logo(False)
return
else:
for item in plist:
if com_number == item[0]:
port_found = 1
break
if port_found == 0:
need_listen = 0
set_connect_logo(False)
messagebox.showinfo(title="Error", message="Cannot find serial "+com_number)
return
try:
ser.port = com_number
ser.baudrate = 115200 #int(baud_rate)
if ser.is_open == False:
ser.open()
except Exception as e:
if ser.is_open == False:
need_listen = 0
set_connect_logo(False)
messagebox.showinfo(title="Error", message=e)
return
set_connect_logo(True)
need_listen = 1
global listen_connect
if listen_connect.is_alive() == False:
listen_connect.start()
def disconnect():
global ser
global need_listen
global linsten_lock
linsten_lock.acquire()
need_listen = 0
linsten_lock.release()
#sleep(0.1)
if ser.is_open == False:
messagebox.showinfo(title="Error", message="Serial not connected!")
else:
try:
ser.close()
except Exception as e:
messagebox.showinfo(title="Error", message=e)
return
need_listen = 0
set_connect_logo(False)
def cancel():
global ymodem_sender
if upgrade_button['state'] == 'disabled':
ymodem_sender.abort()
def upgrade():
global upgrade_button
if ser.is_open == False:
messagebox.showinfo(title="Error", message="Please connect the serial first!")
upgrade_button.configure(state='active')
return
file_list = filedialog.askopenfilenames(filetypes=[("bin file", "*.bin"),("all","*.*")])
if len(file_list) <= 0:
upgrade_button.configure(state='active')
return
else:
ret_val = prepare_upgrade()
if ret_val < 0:
upgrade_button.configure(state='active')
return
upgrade_button.configure(state='disabled')
disconnect_button.configure(state='disabled')
upgrade_thread = threading.Thread(target=do_upgrade,args = (file_list,))
upgrade_thread.start()
def show_progress_bar(show=True):
if show:
progress_bar.place(x=10,y=150)
else:
progress_bar.place_forget()
progress_bar.coords(fill_line, (0, 0, 0, 30))
progress_bar.delete('text')
def serial_reconnect(baud_rate = 115200, timeout = 1):
need_sleep = 1
if ser.baudrate == baud_rate:
need_sleep = 0
try:
ser.timeout = timeout
ser.baudrate = baud_rate
ser.close()
ser.open()
except Exception as e:
raise Exception("Reconnect Fail")
if need_sleep:
sleep(1)
def do_upgrade(file_list):
global upgrade_button
need_listen = 0
sleep(1)
baud_rate = baudratebox.get()
try:
serial_reconnect()
except Exception as e:
print(e)
ser.write("\r".encode("utf-8"))
ch_str = "upgrade -t 0 " + str(int(baud_rate)) + "\r"
ser.write(ch_str.encode("utf-8"))
sleep(1)
for file in file_list:
file_size = os.path.getsize(file)
if file_size > 2*1024*1024:
continue
try:
serial_reconnect(baud_rate = int(baud_rate), timeout = 5)
except Exception as e:
print(e)
show_progress_bar(True)
if len(progress_bar.gettags("text")) == 0:
progress_bar.create_text(175, 15, text=os.path.basename(file), tags="text")
ser.read_all()
ser.write("\r".encode("utf-8"))
ser.write("upgrade -u\r".encode("utf-8"))
while True:
ch_str = ser.read(4).decode("utf-8")
if ch_str == "CCCC":
break
ymodem_send(file)
while True:
if ser.read(1).decode("utf-8") == 'I':
if ser.read(1).decode("utf-8") == 'E':
if ser.read(1).decode("utf-8") == 'T':
ymodem_sender.log.info("Receive IET")
show_progress_bar(False)
sleep(1)
break
else:
continue
else:
continue
show_progress_bar(False)
try:
ser.write("\r".encode("utf-8"))
ser.write("upgrade -t 0 115200\r".encode("utf-8"))
sleep(1)
serial_reconnect()
except Exception as e:
print(e)
upgrade_button.configure(state='active')
disconnect_button.configure(state='active')
need_listen = 1
def ymodem_send(file):
global ymodem_sender
try:
file_stream = open(file, 'rb')
except IOError as e:
raise Exception("Open file fail!")
file_name = os.path.basename(file)
file_size = os.path.getsize(file)
rate = baudratebox.get()
try:
serial_reconnect(baud_rate = int(rate), timeout=5)
except Exception as e:
messagebox.showinfo(title="Error", message="Connection error!")
return
try:
ymodem_sender.send(file_stream, file_name,file_size,callback=upgrade_callback)
except Exception as e:
file_stream.close()
raise
file_stream.close()
def prepare_upgrade():
global ser
ser.flushOutput()
ser.flushInput()
ser.write("\r".encode("utf-8"))
ret_str = ser.read(1024).decode("utf-8")
b_reset= False
if ret_str.find("IET") == -1:
try:
serial_reconnect(baud_rate = 9600)
b_reset = True
except Exception as e:
messagebox.showinfo(title="Error", message=e)
return -1
ser.read_all()
ser.write("flash -u\r".encode("utf-8"))
sleep(0.5)
read_byte = ser.read_all()
if len(read_byte) <= 3:
b_reset = True
else:
ret_str = read_byte[0:min(20,len(read_byte))].decode("utf-8")
if ret_str.find("IET") != -1:
b_reset = True
else:
b_reset = False
if b_reset:
messagebox.showinfo(title="Tips", message="Please reset/reconnect board first, then press [OK]")
sleep(0.5)
serial_reconnect()
return 0
def sender_getc(size):
return ser.read(size) or None
def sender_putc(data):
send_data_mutex.acquire()
ser.write(data)
send_data_mutex.release()
connect_button = Button(app, text="连接",width = 8,height = 1,command=connect)
disconnect_button = Button(app, text="断开",width = 8,height = 1,command=disconnect)
upgrade_button = Button(app, text="升级",width = 8,height = 1,command=upgrade)
cancel_button = Button(app, text="取消升级",width = 8,height = 1,command=cancel)
listen_connect = threading.Thread(target=listen_connect_thread)
send_data_mutex = threading.Lock()
ymodem_sender = YMODEM(sender_getc, sender_putc)
def init_layout():
app.title("xx科技")
app.iconbitmap(".\\xxxx.ico")
app.geometry('400x200')
app.protocol("WM_DELETE_WINDOW", on_closing)
app.resizable(width=False, height=False)
Label(app, text="端口:", font=('Arial', 14)).place(x=10, y=10)
comportbox["value"] = ("COM1","COM2","COM3","COM4","COM5","COM6","COM7","COM8","COM9","COM10")
comportbox.current(2)
comportbox.place(x=75, y=14)
Label(app, text="波特率:", font=('Arial', 14)).place(x=200, y=10)
baudratebox["value"] = ("9600","115200","230400","576000")
baudratebox.current(1)
baudratebox.place(x=285, y=14)
connect_button.place(x=10,y=50)
disconnect_button.place(x=10,y=100)
cancel_button.place(x=285,y=50)
upgrade_button.place(x=285,y=100)
show_progress_bar(False)
set_connect_logo(False)
def main():
init_layout()
mainloop()
def on_closing():
exit_listen = True
sleep(0.4)
try:
ser.close()
except Exception as e:
print(e)
pass
app.destroy()
if __name__ == '__main__':
main()
# -*- coding: utf-8 -*-
import logging
from time import sleep
logging.basicConfig(level = logging.DEBUG, format = '%(asctime)s - %(levelname)s - %(message)s')
# ymodem data header byte
SOH = b'\x01'
STX = b'\x02'
EOT = b'\x04'
ACK = b'\x06'
NAK = b'\x15'
CAN = b'\x18'
CRC = b'C'
class YMODEM(object):
# initialize
def __init__(self, getc, putc, mode='ymodem', header_pad=b'\x00', pad=b'\x1a'):
self.getc = getc
self.putc = putc
self.mode = mode
self.header_pad = header_pad
self.pad = pad
self.log = logging.getLogger('YReporter')
# send abort(CAN) twice
def abort(self, count=2):
for _ in range(count):
self.putc(CAN)
'''
send entry
'''
def send(self, file_stream, file_name, file_size=0, retry=20, timeout=15, callback=None):
try:
packet_size = dict(
ymodem = 1024,
ymodem128 = 128
)[self.mode]
except KeyError:
raise ValueError("Invalid mode specified: {self.mode!r}".format(self=self))
self.log.debug('Begin start sequence')
# Receive first character
error_count = 0
cancel = 0
while True:
char = self.getc(1)
if char:
if char == CRC:
# Expected CRC
self.log.info("<<< CRC")
break
elif char == CAN:
self.log.info("<<< CAN")
if cancel:
return False
else:
cancel = 1
else:
self.log.error("send error, expected CRC or CAN, but got " + hex(ord(char)))
error_count += 1
if error_count > retry:
self.abort()
self.log.error("send error: error_count reached %d aborting", retry)
return False
header = self._make_send_header(128, 0)
name = bytes(file_name, encoding = "utf8")
size = bytes(str(file_size),encoding = "utf8")
data = name + b'\x00' + size + b'\x20'
data = data.ljust(128, self.header_pad)
checksum = self._make_send_checksum(data)
data_for_send = header + data + checksum
self.putc(data_for_send)
#self.log.info("Packet 0 >>> " + str(len(data_for_send)))
error_count = 0
cancel = 0
# Receive reponse of first packet
while True:
char = self.getc(1)
if char:
if char == ACK:
self.log.info("<<< ACK")
char2 = self.getc(1)
if char2 == CRC:
self.log.info("<<< CRC")
break
else:
self.log.warn("ACK wasnt CRCd")
break
elif char == CAN:
self.log.info("<<< CAN")
if cancel:
return False
else:
cancel = 1
else:
if (ord(char)) >= 0x20 and (ord(char)) <= 0x7e:
self.log.error("test" + str(char))
else:
self.log.error("send error, expected ACK or CAN, but got " + hex(ord(char)))
error_count = 0
cancel = 0
total_packets = 1
sequence = 1
sleep(1)
while True:
# Read raw data from file stream
data = file_stream.read(packet_size)
if not data:
self.log.debug('send: at EOF')
break
total_packets += 1
header = self._make_send_header(packet_size, sequence)
data = data.ljust(packet_size, self.pad)
checksum = self._make_send_checksum(data)
while True:
data_for_send = header + data + checksum
# data_in_hexstring = "".join("%02x" % b for b in data_for_send)
# Send file data packet
self.putc(data_for_send)
#self.log.info("Packet " + str(sequence) + " >>>" + str(len(data_for_send)))
error_count = 0
while True:
char = self.getc(1)
if char == ACK:
break
else:
error_count += 1
if error_count > retry:
self.abort()
return False
error_count = 0
if char == ACK:
# Expected response
#self.log.info("<<< ACK")
if callable(callback):
callback(total_packets,file_size,file_name)
error_count = 0
break
error_count += 1
if error_count > retry:
self.abort()
self.log.error('send error: NAK received %d , aborting', retry)
return False
sequence = (sequence + 1) % 0x100
# Send EOT and expect final ACK
error_count = 0
while True:
self.putc(EOT)
self.log.info(">>> EOT")
char = self.getc(1)
if char == ACK:
self.log.info("<<< ACK")
break
else:
error_count += 1
if error_count > retry:
self.abort()
self.log.warn('EOT wasnt ACKd, aborting transfer')
return False
header = self._make_send_header(128, 0)
data = bytearray(b'\x00')
data = data.ljust(128, self.header_pad)
checksum = self._make_send_checksum(data)
data_for_send = header + data + checksum
self.putc(data_for_send)
error_count = 0
while True:
char = self.getc(1)
if char == ACK :
break
else:
error_count += 1
if error_count > retry:
self.abort()
self.log.warn('SOH wasnt ACK, aborting transfer')
return False
self.log.info('Transmission successful (ACK received)')
return True
# Header byte
def _make_send_header(self, packet_size, sequence):
assert packet_size in (128, 1024), packet_size
_bytes = []
if packet_size == 128:
_bytes.append(ord(SOH))
elif packet_size == 1024:
_bytes.append(ord(STX))
_bytes.extend([sequence, 0xff - sequence])
return bytearray(_bytes)
# Make check code
def _make_send_checksum(self, data):
_bytes = []
crc = self.calc_crc(data)
_bytes.extend([crc >> 8, crc & 0xff])
return bytearray(_bytes)
def _verify_recv_checksum(self, data):
_checksum = bytearray(data[-2:])
their_sum = (_checksum[0] << 8) + _checksum[1]
data = data[:-2]
our_sum = self.calc_crc(data)
valid = bool(their_sum == our_sum)
return valid, data
# For CRC algorithm
crctable = [
0x0000, 0x1021, 0x2042, 0x3063, 0x4084, 0x50a5, 0x60c6, 0x70e7,
0x8108, 0x9129, 0xa14a, 0xb16b, 0xc18c, 0xd1ad, 0xe1ce, 0xf1ef,
0x1231, 0x0210, 0x3273, 0x2252, 0x52b5, 0x4294, 0x72f7, 0x62d6,
0x9339, 0x8318, 0xb37b, 0xa35a, 0xd3bd, 0xc39c, 0xf3ff, 0xe3de,
0x2462, 0x3443, 0x0420, 0x1401, 0x64e6, 0x74c7, 0x44a4, 0x5485,
0xa56a, 0xb54b, 0x8528, 0x9509, 0xe5ee, 0xf5cf, 0xc5ac, 0xd58d,
0x3653, 0x2672, 0x1611, 0x0630, 0x76d7, 0x66f6, 0x5695, 0x46b4,
0xb75b, 0xa77a, 0x9719, 0x8738, 0xf7df, 0xe7fe, 0xd79d, 0xc7bc,
0x48c4, 0x58e5, 0x6886, 0x78a7, 0x0840, 0x1861, 0x2802, 0x3823,
0xc9cc, 0xd9ed, 0xe98e, 0xf9af, 0x8948, 0x9969, 0xa90a, 0xb92b,
0x5af5, 0x4ad4, 0x7ab7, 0x6a96, 0x1a71, 0x0a50, 0x3a33, 0x2a12,
0xdbfd, 0xcbdc, 0xfbbf, 0xeb9e, 0x9b79, 0x8b58, 0xbb3b, 0xab1a,
0x6ca6, 0x7c87, 0x4ce4, 0x5cc5, 0x2c22, 0x3c03, 0x0c60, 0x1c41,
0xedae, 0xfd8f, 0xcdec, 0xddcd, 0xad2a, 0xbd0b, 0x8d68, 0x9d49,
0x7e97, 0x6eb6, 0x5ed5, 0x4ef4, 0x3e13, 0x2e32, 0x1e51, 0x0e70,
0xff9f, 0xefbe, 0xdfdd, 0xcffc, 0xbf1b, 0xaf3a, 0x9f59, 0x8f78,
0x9188, 0x81a9, 0xb1ca, 0xa1eb, 0xd10c, 0xc12d, 0xf14e, 0xe16f,
0x1080, 0x00a1, 0x30c2, 0x20e3, 0x5004, 0x4025, 0x7046, 0x6067,
0x83b9, 0x9398, 0xa3fb, 0xb3da, 0xc33d, 0xd31c, 0xe37f, 0xf35e,
0x02b1, 0x1290, 0x22f3, 0x32d2, 0x4235, 0x5214, 0x6277, 0x7256,
0xb5ea, 0xa5cb, 0x95a8, 0x8589, 0xf56e, 0xe54f, 0xd52c, 0xc50d,
0x34e2, 0x24c3, 0x14a0, 0x0481, 0x7466, 0x6447, 0x5424, 0x4405,
0xa7db, 0xb7fa, 0x8799, 0x97b8, 0xe75f, 0xf77e, 0xc71d, 0xd73c,
0x26d3, 0x36f2, 0x0691, 0x16b0, 0x6657, 0x7676, 0x4615, 0x5634,
0xd94c, 0xc96d, 0xf90e, 0xe92f, 0x99c8, 0x89e9, 0xb98a, 0xa9ab,
0x5844, 0x4865, 0x7806, 0x6827, 0x18c0, 0x08e1, 0x3882, 0x28a3,
0xcb7d, 0xdb5c, 0xeb3f, 0xfb1e, 0x8bf9, 0x9bd8, 0xabbb, 0xbb9a,
0x4a75, 0x5a54, 0x6a37, 0x7a16, 0x0af1, 0x1ad0, 0x2ab3, 0x3a92,
0xfd2e, 0xed0f, 0xdd6c, 0xcd4d, 0xbdaa, 0xad8b, 0x9de8, 0x8dc9,
0x7c26, 0x6c07, 0x5c64, 0x4c45, 0x3ca2, 0x2c83, 0x1ce0, 0x0cc1,
0xef1f, 0xff3e, 0xcf5d, 0xdf7c, 0xaf9b, 0xbfba, 0x8fd9, 0x9ff8,
0x6e17, 0x7e36, 0x4e55, 0x5e74, 0x2e93, 0x3eb2, 0x0ed1, 0x1ef0,
]
# CRC algorithm: CCITT-0
def calc_crc(self, data, crc=0):
for char in bytearray(data):
crctbl_idx = ((crc >> 8) ^ char) & 0xff
crc = ((crc << 8) ^ self.crctable[crctbl_idx]) & 0xffff
return crc & 0xffff
if __name__ == '__main__':
pass
参考:
https://blog.csdn.net/u012993936/article/details/125102816
https://blog.csdn.net/gitblog_00099/article/details/137135096
https://blog.csdn.net/xuyinxin/article/details/104174587
https://github.com/alexwoo1900/ymodem.git
![51 单片机[2-1]:点亮一个LED](https://img-blog.csdnimg.cn/img_convert/1c79b1302f7a54cb48809427d581a9be.png)