1.开发背景
基于上一篇指引,成功创建并启动线程后,线程已经开始运行了,但是有时我们需要线程暂停运行,例如某个线程是控制 LED 闪灯的,如果现在需要让 LED 停止工作,单纯的关闭 LED 是没用的,因为下一时刻线程可能就会重新打开 LED 导致程序没有达到预期,所以线程引入了一个挂起的状态,如下图,FreeRTOS 引入了线程的多个状态。
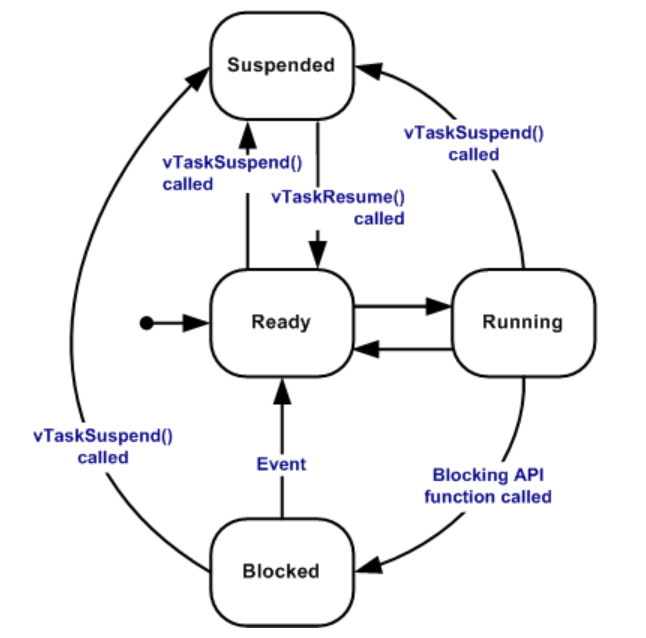
其中包含 Running、Ready、Suspended、Blocked 等状态。
Running:即运行态,是成功获取了 CPU 使用权的线程。
Ready:即准备态,单核 CPU 在同一时刻只能做一件事情,所以如果当前有其他线程获取了 CPU 的使用权(一般是高优先级线程),这个时候等待运行的线程就是准备态。
Suspended:即挂起态,正如上文说到的,如果我们想让某个线程暂时停止工作,就可以挂起对应线程,被挂起的线程就是挂起态。
Blocked:即阻塞态,因为线程存在高低优先级,如果高优先级线程一直运行会导致低优先级线程一直抢占不到 CPU 的使用权,如果使用挂起的方式去挂起高优先级线程,那么高优先级线程的实时性就会大打折扣,所以就引入了阻塞的概念,高优先级线程可以一直阻塞在某个事件,在阻塞期间会让出 CPU 的使用权,但是一旦高优先级线程满足指定事件就会立刻抢占低优先级线程的 CPU 使用权,这样就保证了高优先级线程的实时性。
上述纯粹个人理解,如有误请见谅,可以参考链接:FreeRTOS task states and state transitions described
2.开发需求
挂起、恢复和删除已有线程
3.开发环境
window10 + MDK + STM32F429 + FreeRTOS10.3.1
4.实现步骤
4.1 线程挂起其他线程
1)创建控制线程和 2 个测试线程
/* 测试初始化 */
void aTest_Init(void)
{
/* 创建动态任务 */
xTaskCreate(TaskCtrl, "TaskCtrl", 500, NULL, 5, &p->taskCtrl);
/* 共用一个任务函数 创建多个任务 */
static char whichTask[TASK_LIST_SIZE][3] = {0};
for (int i = 0; i < TASK_LIST_SIZE; i++)
{
snprintf(whichTask[i], 2, "%d", i);
xTaskCreate(TaskList, "TaskList", 500, (void*)whichTask[i], 5, &p->taskList[i]);
}
}2)测试线程循环打印
/* 动态任务组 */
static void TaskList(void *pvParameters)
{
int count = 0;
int whichTask = atoi(pvParameters);
Log_Debug("%s [%d]\r\n", __func__, whichTask);
for ( ; ; )
{
vTaskDelay(1000);
Log_Debug("%s [%d] count = %d\r\n", __func__, whichTask, count++);
}
}3)控制线程间断挂起和恢复,使用 vTaskSuspend 挂起线程,vTaskResume 恢复线程。
/* 动态任务 */
static void TaskCtrl(void *pvParameters)
{
Log_Debug("%s\r\n", __func__);
/* 挂起线程 0 */
vTaskDelay(3000);
vTaskSuspend(p->taskList[0]);
vTaskDelay(3000);
vTaskResume(p->taskList[0]);
for ( ; ; )
{
vTaskDelay(1000);
}
}4)测试结果
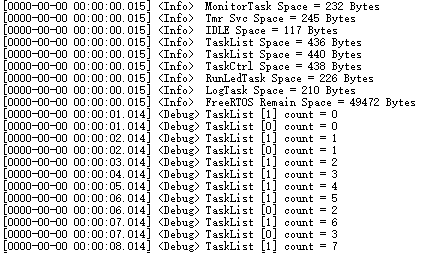
如图所示,可以看出线程0 中间有 3 个周期是停止工作的。
4.2 线程挂起线程本身
1)基于上面试验的基础上,修改测试线程为打印日志后挂起自身,这里做这个试验是为了验证 vTaskSuspend 如果传入参数为 NULL,即指向线程本身。
/* 动态任务组 */
static void TaskList(void *pvParameters)
{
int count = 0;
int whichTask = atoi(pvParameters);
Log_Debug("%s [%d]\r\n", __func__, whichTask);
for ( ; ; )
{
vTaskDelay(1000);
Log_Debug("%s [%d] count = %d\r\n", __func__, whichTask, count++);
vTaskSuspend(NULL);
}
}2)控制线程只需定期恢复线程即可
/* 动态任务 */
static void TaskCtrl(void *pvParameters)
{
Log_Debug("%s\r\n", __func__);
/* 挂起线程 0 */
vTaskDelay(3000);
vTaskResume(p->taskList[0]);
for ( ; ; )
{
vTaskDelay(1000);
}
}3)测试结果
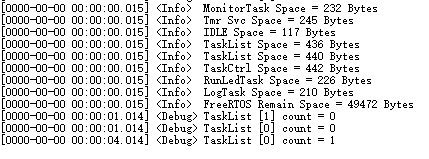
如图所示,测试线程执行了一次就挂起了本身,控制线程间隔 3s 之后唤醒了一次测试线程0
4)源码解析
vTaskSuspend
-> prvGetTCBFromHandle
/*
* Several functions take an TaskHandle_t parameter that can optionally be NULL,
* where NULL is used to indicate that the handle of the currently executing
* task should be used in place of the parameter. This macro simply checks to
* see if the parameter is NULL and returns a pointer to the appropriate TCB.
*/
#define prvGetTCBFromHandle( pxHandle ) ( ( ( pxHandle ) == NULL ) ? pxCurrentTCB : ( pxHandle ) )
如源码所示,如果传入指针为空,即获取当前控制块 pxCurrentTCB
4.3 中断中恢复线程
1)基于上面的实验使用中断来代替控制线程来恢复已挂起的测试线程
/* Key2 PC13 Key0 PH3 Key1 PH2 */
void Exti13_TriggerInterrupt(void)
{
if (mspGpio_GetInput("PC13") == 0)
{
Log_Debug("%s 按键执行测试线程0 恢复\r\n", __func__);
BaseType_t xYieldRequired;
xYieldRequired = xTaskResumeFromISR(p->taskList[0]);
portYIELD_FROM_ISR(xYieldRequired);
mspExti_Close(13);
}
}在中断中使用 FreeRTOS 接口需要带 FromISR 后缀的,如 xTaskResumeFromISR,需要portYIELD_FROM_ISR 切换上下文,否则实时性会收到一定的影响,为了调试和演示方便在中断中打印了数据,在实际项目中切记不要在中断中停留,特别是打印等高延时操作。
2)测试结果
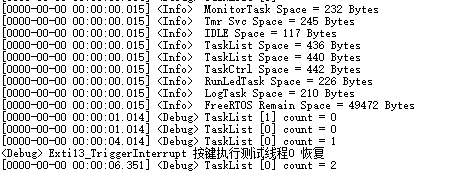
如图所示,在中断中恢复已经挂起的线程也是可以的。
4.4 线程删除
1)线程删除后会释放内存,由于现在的线程都是在系统堆栈动态开辟的,所以线程删除后内存会回归系统内存堆栈。
/* 动态任务 */
static void TaskCtrl(void *pvParameters)
{
Log_Debug("%s\r\n", __func__);
/* 挂起线程 0 */
vTaskDelay(3000);
Log_Info("FreeRTOS Remain Space = %d Bytes\r\n", xPortGetFreeHeapSize());
vTaskDelete(p->taskList[0]);
Log_Info("Delete Task0 And FreeRTOS Remain Space = %d Bytes\r\n", xPortGetFreeHeapSize());
vTaskDelete(p->taskList[1]);
Log_Info("Delete Task1 And FreeRTOS Remain Space = %d Bytes\r\n", xPortGetFreeHeapSize());
for ( ; ; )
{
vTaskDelay(1000);
// Log_Debug("%s\r\n", __func__);
}
}
2)测试结果
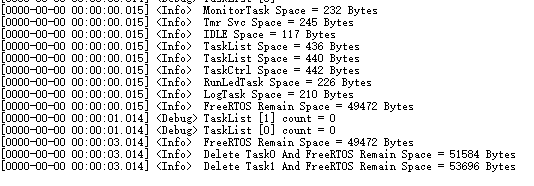
如图所示,删除2个任务后,系统内存由 49472Bytes -> 51584Bytes -> 53696Bytes