花了不少时间看完了障碍物地图的大致思路,这里简单根据前面的思路来写一个简易版的障碍物地图。
1.订阅一张地图
首先,我们需要一张静态地图作为原始数据,这个我们可以订阅当前的map来获取:
void map_test1::MapCallback(const nav_msgs::OccupancyGrid::ConstPtr& map)
{
map_origin = map->info.origin;
ROS_INFO("map_origin.x:%f,y:%f",map_origin.position.x,map_origin.position.y);
map_resolution = map->info.resolution;
ROS_INFO("map_resolution:%f",map_resolution);
map_width = map->info.width;
map_height = map->info.height;
ROS_INFO("map_width:%d",map_width);
ROS_INFO("map_height:%d",map_height);
raw_data.clear();
for(int i=0;i<map->data.size();i++)
{
raw_data.push_back(map->data[i]);
}
first_receive = true;
ROS_INFO("get raw map");
map_sub.shutdown();
}
这里代码的处理比较简单,只是简单的存储了当前地图的基本信息数据,以给到后续代码使用。
2.订阅激光数据
第一部分我们获取到的只是最基本的原始地图数据,然后我们需要将障碍物添加到地图中去,也就是当前的激光点云,在原代码中,对于来自传感器的点云是存储了一定时间内的,这里我们按照原代码的思路也需要存储一定时间下的点云:
void map_test1::ScanCallback(const sensor_msgs::LaserScan::ConstPtr& scan_in)
{
sensor_msgs::PointCloud mapcloud;
if(scan_in->header.frame_id.find("laser")==string::npos)
return;
if(!tf_listener.waitForTransform(
scan_in->header.frame_id,
"/map",
scan_in->header.stamp + ros::Duration().fromSec(scan_in->ranges.size()*scan_in->time_increment),
ros::Duration(1))){
//ROS_INFO("timestamp error");
return;
}
try
{
projector_.transformLaserScanToPointCloud("/map",*scan_in,mapcloud,tf_listener);
}
catch(const std::exception& e)
{
ROS_ERROR("%s", e.what());
}
mapcloud.header.frame_id = scan_in->header.frame_id;
tf::StampedTransform transform;
try{
tf_listener.lookupTransform("/map", "/base_link",
ros::Time(0), transform);
}
catch (tf::TransformException &ex) {
ROS_ERROR("%s",ex.what());
ros::Duration(1.0).sleep();
return;
}
Obstacle obstacle_cloud;
obstacle_cloud.origin_.x = transform.getOrigin().getX();
obstacle_cloud.origin_.y = transform.getOrigin().getY();
obstacle_cloud.obstacle_range_ = 25.0;
obstacle_cloud.cloud_.points = mapcloud.points;
//processCloud(mapcloud);
double now_time = ros::Time::now().toSec();
laser_points.insert(std::make_pair(now_time, obstacle_cloud));
}
简单解析一下上述代码,首先第一部分是调用的ROS下的开源包transformLaserScanToPointCloud将激光点云在传感器坐标系转换到map坐标系下,然后同步存储该时刻下的机器人位姿(参考Observation类函数的形式),最后统一存储到obstacle_cloud下。注意这里我没有使用类函数的形式去保存,因为代码写的比较简单,直接使用了结构体进行的数据存储,然后再使用unordered_map的格式存储的一系列数据。通过这种方式实现了一个类似于Observation类以及ObservationBuffer的处理方式。
3.删除时间过久的数据
对于那些超过一定时间的点云,我们这里也是同样需要对其进行删除的,删除的方式也很简单,直接从unordered_map中删除掉这一条数据就可以了:
void map_test1::DeletePoint()
{
if (laser_points.empty()) {
return;
}
double now_time = ros::Time::now().toSec();
auto ite = laser_points.begin();
while (ite != laser_points.end()) {
if (now_time - ite->first > dely_time) {
// 删除当前元素,并预取下一个元素的迭代器
laser_points.erase(ite++);
} else {
++ite; // 正常移动到下一个元素
}
}
}
4.将激光点云添加到地图中
这里就用到了上一章中看过的东西了:
void map_test1::AddScanData()
{
//拷贝原始数据
obstacle_map_data = raw_data;
//遍历激光点云
unordered_map<double, Obstacle>::iterator ite;
//ROS_INFO("MAP.SIZE:%zu",laser_points.size());
for (ite = laser_points.begin(); ite != laser_points.end(); ite++) {
//ROS_INFO("point.size:%ld",ite->second.cloud_.points.size());
for(int i=0;i<ite->second.cloud_.points.size();i++)
{
//舍弃地图外的点
if(!InMap(ite->second.cloud_.points[i].x,ite->second.cloud_.points[i].y))
{
continue;
}
//舍弃距离过远的点
if(sqrt((ite->second.cloud_.points[i].x-ite->second.origin_.x)*(ite->second.cloud_.points[i].x-ite->second.origin_.x)+
(ite->second.cloud_.points[i].y-ite->second.origin_.y)*(ite->second.cloud_.points[i].y-ite->second.origin_.y))>ite->second.obstacle_range_)
{
continue;
}
ModifyMap(ite->second.cloud_.points[i].x,ite->second.cloud_.points[i].y,obstacle_map_data);
}
}
}
首先,我们需要遍历之前存储的每一帧激光点云中的点,判断这个点是否在地图上:
bool map_test1::InMap(double x,double y)
{
if(x>(map_origin.position.x+map_resolution*map_width) || x<map_origin.position.x)
{
//ROS_INFO("point not in map,point position:%f,%f",x,y);
//ROS_INFO("map max_x:%f,min_x:%f",map_origin.position.x+map_resolution*map_width,map_origin.position.x);
return false;
}
else if(y>(map_origin.position.y+map_resolution*map_height) || y<map_origin.position.y)
{
//ROS_INFO("point not in map,point position:%f,%f",x,y);
//ROS_INFO("map max_y:%f,min_y:%f",map_origin.position.y+map_resolution*map_height,map_origin.position.y);
return false;
}
return true;
}
对于那些不在地图中的数据我们就没有必要再进行后续的处理了。然后我们根据之前设置的obstacle_range_参数判断这个点到当时机器人本体所在位置的距离是否足够近,由此排除掉一些非常远的点。
//舍弃距离过远的点
if(sqrt((ite->second.cloud_.points[i].x-ite->second.origin_.x)*(ite->second.cloud_.points[i].x-ite->second.origin_.x)+
(ite->second.cloud_.points[i].y-ite->second.origin_.y)*(ite->second.cloud_.points[i].y-ite->second.origin_.y))>ite->second.obstacle_range_)
{
continue;
}
然后,我们就可以对剩下的点调用ModifyMap函数修改对应点所在的地图栅格值:
void map_test1::ModifyMap(double x,double y,std::vector<int> &map)
{
int mx,my;
if(!worldToMap(x,y,mx,my))
{
return;
}
map[my * map_width + mx] = 100;
}
注意这里调用了worldToMap是根据源代码来写的,输入地图点的坐标返回的是栅格地图的XY索引。最后转化成一维坐标并修改对应的值:
bool map_test1::worldToMap(double wx, double wy, int& mx, int& my)
{
if (wx < map_origin.position.x || wy < map_origin.position.y)
return false;
mx = (int)((wx - map_origin.position.x) / map_resolution);
my = (int)((wy - map_origin.position.y) / map_resolution);
if (mx < map_width && my < map_height)
return true;
return false;
}
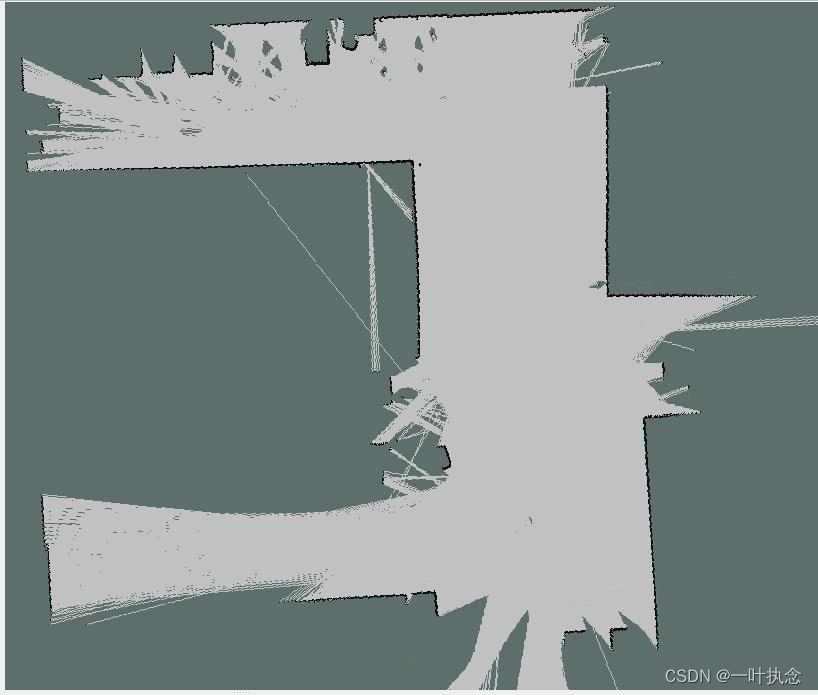
到此,一个简单的障碍物地图就差不多实现了,运行这个代码并给定一些地图以及激光数据,我们大概就能得到类似于这样子的情况:
原始地图:
 加入障碍物点云:
加入障碍物点云:
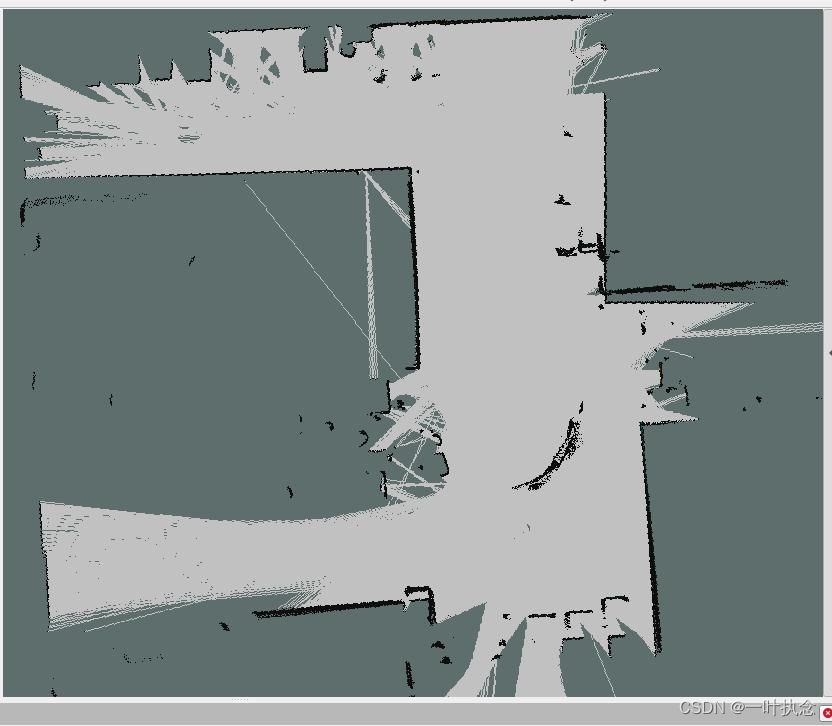
上述图片中是保留了2s内的激光点云的,所以在运动的时候会看到边界会显得更加粗一点,部分动态障碍物还存在托尾。
放一段动图:
简单障碍物地图实现








![[牛客网]——C语言刷题day2](https://img-blog.csdnimg.cn/direct/8f17e456eddd4530956ab09e5246018b.png)