克鲁斯工业机器人是一种高度精密的自动化设备,广泛应用于制造业、物流等领域。为了确保机器人的正常运行,了解一些基本的CLOOS工业机械手维修知识是必不可少的。
【常见CLOOS机械臂故障及解决方法】
1. 机器人无法启动:检查电源是否正常,电源插头是否插好,保险丝是否熔断等。
2. 机器人运行不稳定:检查机械手电机、机械臂减速机、机器人驱动部件等是否正常工作。
3. 机器人碰撞保护:检查安全防护装置是否正常工作,确保CLOOS机器人与障碍物之间有足够的距离。
4. 机器人过热:检查散热系统是否正常,确保机器人的工作环境适宜。
【克鲁斯机器人维修技巧】
1. 观察法:观察机器人运行状态,判断故障原因。注意观察机器人外观是否有破损、裂缝、变色等情况。
2. 听觉法:使用听诊器等工具,听取机器人各部件的运行声音,判断是否存在异响、摩擦等异常情况。
3. 手动调试:熟悉机器人控制系统,进行手动调试,逐步排查故障点。
4. 使用仪器:使用示波器、万用表等仪器,精确检测故障原因,进行维修或更换部件。
【CLOOS机械手维修注意事项】
1. 确保安全:在克鲁斯工业机器人维修时,要确保自身安全,遵守安全操作规程。佩戴防护手套、防护眼镜等防护用品。
2. 避免破坏:在拆卸机器人部件时,要轻拿轻放,避免损坏部件或造成其他故障。
3. 遵循流程:在进行CLOOS工业机械手维修前,要了解故障原因和维修流程,按照流程进行维修操作。
4. 定期维护:联系子锐机器人定期进行克鲁斯机器人保养和检查,及时发现并排除潜在故障,延长机器人的使用寿命。
子锐机器人常见克鲁斯机器人维修型号:
克鲁斯机械手GLC 553 控制板 033057780E 维修
克鲁斯机械臂示教器电缆线/038731815/CLOOS 15m维修
CLOOS工业机器人焊机主板033099700 主板维修
CLOOS 机器人CPU板0033590080 QuadCore 维修
CLOOS工业机器人驱动器E93DA222C4B551维修
CLOOS机器人示教器038112100维修
克鲁斯机械手焊接电缆536500450维修
克鲁斯CLOOS机器人维修知识分享
news2026/2/14 17:48:44
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如若转载,请注明出处:http://www.coloradmin.cn/o/1674854.html
如若内容造成侵权/违法违规/事实不符,请联系多彩编程网进行投诉反馈,一经查实,立即删除!相关文章
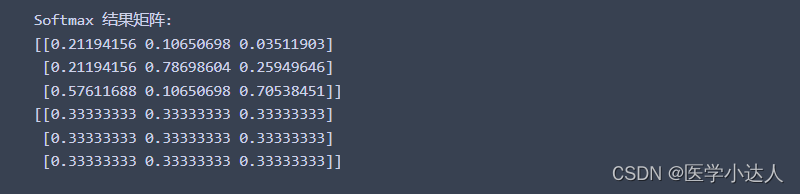
python 对矩阵与矩阵之间对应位置的元素,做softmax操作,代码实战
1.对矩阵中对应位置的元素,做softmax 对于一个向量,softmax函数会对其中每一个元素进行指数运算,然后除以所有元素指数和的结果。当将其应用到多个矩阵的相应位置上时,我们实际上是在对每个位置的一组数(从各个矩阵的同…
【MP C3003】理光打印机驱动下载使用
官方下载链接 https://support.ricoh.com/bb/html/dr_ut_e/apc/model/mpc3003/mpc3003.htm?langen
sklearn中多分类和多标签分类评估方法总结
一、任务区分 多分类分类任务:在多分类任务中,每个样本只能被分配到一个类别中。换句话说,每个样本只有一个正确的标签。例如,将图像分为不同的物体类别,如猫、狗、汽车等。 多标签分类任务:在多标签分类任…

商家利器!手机智能无人直播实时场景,轻松解决获客难、成本高难题
随着互联网的飞速发展,直播行业正在成为一种新型的商业模式。然而,许多商家在进行直播带货时面临着获客困难和高成本的挑战。为了解决这些问题,本文将介绍一种名为"自动直播"的功能,并详述如何利用手机实现实时场景…
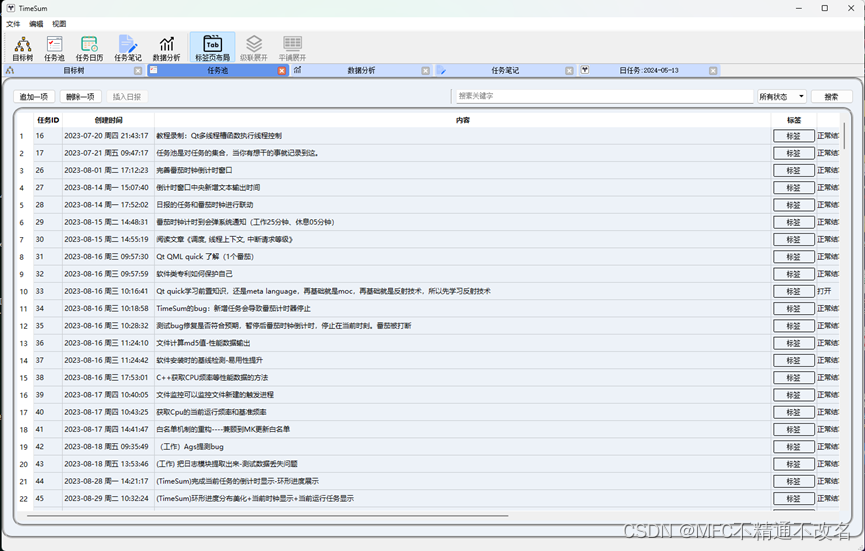
使用TimeSum教你打造一套最牛的知识笔记管理系统!
从用户使用场景进行介绍软件的使用:
一、用户需求:
我需要一款软件记录我每天: 干了啥事有啥输出(文档)需要时间统计,后续会复盘记录的内容有好的逻辑关系需要有日历进行展示。 二、软件使用介绍…

《告别重复:Spring AOP让你的代码花园绽放》
厌倦了在代码花园中重复种植相同的植物(代码)吗?Spring AOP将是你的园艺师,帮助你修剪和优化代码,让花园更加丰富多彩! 文章目录 面向切面编程(AOP)主题文章一. 引言1.1 引入面向切面…

基于 Kernel PCA 的故障检测与诊断
基于 Kernel PCA 的故障检测与诊断
在工业领域,轴承是一种常见但重要的机械元件,负责支撑旋转部件并减少摩擦。然而,由于长时间的使用和环境因素等原因,轴承可能会出现各种故障,如磨损、裂纹等,这些故障如…
Vue的学习 —— <初识vue>
目录
前言
目标
前端的发展历程
正篇开始——Vue讲解
一、Vue简介
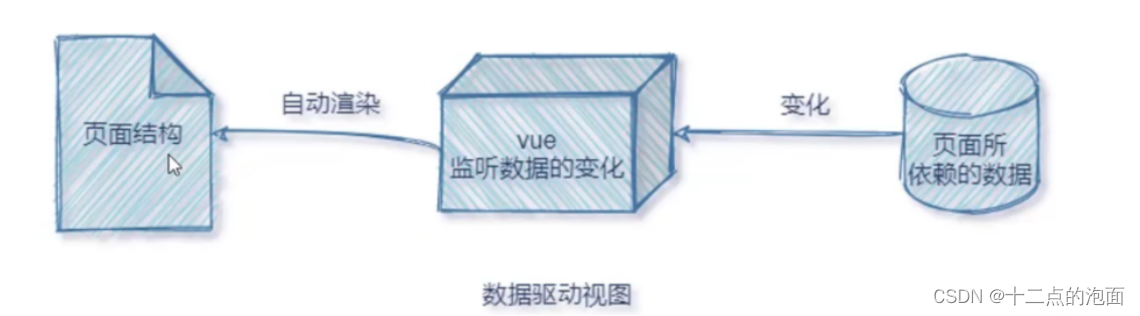
二、Vue特性
1、数据驱动视图
2、双向数据绑定
3、指令
4、插件
三、vue的三大版本 前言
在这个快速迭代的互联网时代,前端技术的发展日新月异,Vue.js的出现无疑为前端开发领…

普华永道:首席数据官在规模较小企业中的渗透率攀升
5月13日,普华永道发布第三期《全球首席数据官调研》显示,数据持续受到企业高层重视,用于解决最紧迫的公共问题,且首席数据官在规模较小的企业中的渗透率攀升。 调研发现,2023年,全球市值排名前2500家上市企…

探索制造业中 AI 人工智能与 MES 的协同效应
AI已经渗透到我们日常生活中的各种工具中——从语音助手到语言翻译,以及允许我们从图片、手写笔记中提取结构化数据的工具。AI还为许多流程自动化提供动力,纾解管理、物流、会计和人力资源部门员工的工作量和压力。
AI、物联网和新兴的超高速网络&#…
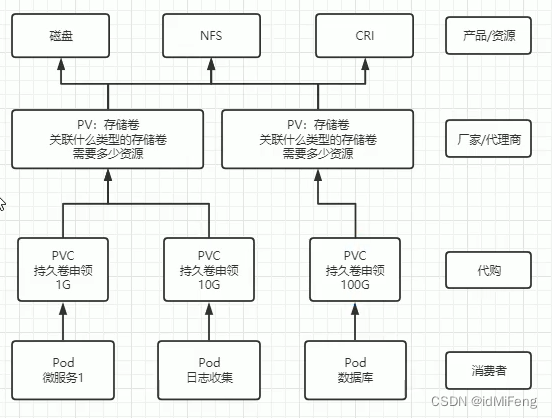
秒懂k8s中资源的介绍和用法
service介绍
解决什么问题
Pod的生命是有限的,死亡过后不会复活了,尽管每个Pod都有自己的IP地址,但是如果Pod重新启动了的话那么他的IP很有可能也就变化了。这就会带来一个问题:比如我们有一些后端的Pod的集合为集群中的其他前端…

shell脚本之函数和数组
目录 一.函数
1.函数的简介
2.函数具有的几个要素
3.定义函数
4.调用函数
5.传递参数
6.函数返回值
7.函数的变量作用范围
8.函数递归
9.查看函数
二.数组
1.数组简介
2.定义数组
3.数组索引
4.数组替换 一.函数
1.函数的简介
在Shell脚本中,函数是…

网络传输,请每次都开启 TCP_NODELAY
原文:Marc Brooker - 2024.05.09
(注:不必过于担心这个问题,大部分现代库,语言(如 Go),代理(如 Envoy),都默认设置了 TCP_NODELAY。如果遇到网络…
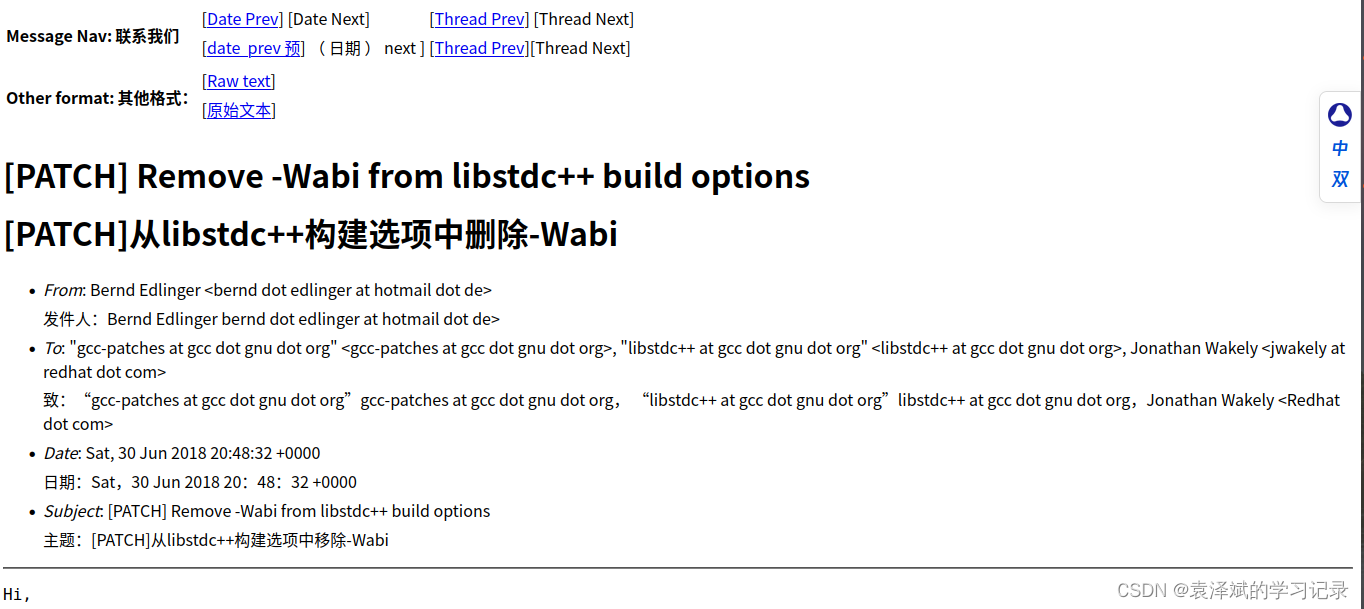
ubuntu编译pcl时报错
报错如下
cc1plus: warning: -Wabi wont warn about anything [-Wabi]
cc1plus: note: -Wabi warns about differences from the most up-to-date
ABI, which is also used by default
cc1plus: note: use e.g. -Wabi11 to warn about changes from GCC 7 在网上找到了一封邮件…

深度剖析进程概念与进程状态
文章目录 1. 前言2. 什么是进程2.1 进程概念2.2 进程描述——PCB 3. 进程的一些基本操作3.1 查看进程3.2 结束进程3.3 通过系统调用获取进程标示符3.4 通过系统调用创建子进程 4. 进程状态4.1 普适的操作系统层面4.2 具体Linux操作系统层面 5. 两种特殊的进程5.1 僵尸进程5.2 孤…
2024第二届区块链、物联网与金融管理国际会议(ICBITFM2024)
2024第二届区块链、物联网与金融管理国际会议(ICBITFM2024)
会议简介
2024第二届区块链、物联网与金融管理国际会议(ICBITFM 2024)是一个重要的学术会议,旨在促进区块链、物联网和金融管理领域的交流和合作,对于推动这些领域的发展和创新具有重要意义。…

云商店如何让更多企业摘到技术普惠的“果实”?
文 | 智能相对论
作者 | 沈浪
现阶段,越是工业体系发达的地区,越需要加速技术普惠的步伐。比如,在苏州,华为云就在联合当地政府、企业伙伴打造以华为云云商店为重要链接的智能化商业增长底座。
华为云云商店以“电商式”的购物…
vue自定义权限指令
定义v-hasPermi指令 /*** v-hasPermi 操作权限处理*/import useUserStore from /store/modules/userexport default {mounted(el, binding, vnode) {const { value } bindingconst all_permission "*:*:*";const permissions useUserStore().permissionsÿ…
![[IMX6ULL驱动开发]-GPIO子系统和Pinctrl子系统](https://img-blog.csdnimg.cn/direct/66266a1aded6467ca0bbbc400ef3f70b.png)
[IMX6ULL驱动开发]-GPIO子系统和Pinctrl子系统
目录
Pinctrl子系统的概念
GPIO子系统的概念
定义自己的GPIO节点
GPIO子系统的函数
引脚号的确定
基于GPIO子系统的驱动程序
驱动程序
设备树修改 之前我们进行驱动开发的时候,对于硬件的操作是依赖于ioremap对寄存器的物理地址进行映射,以此来达…
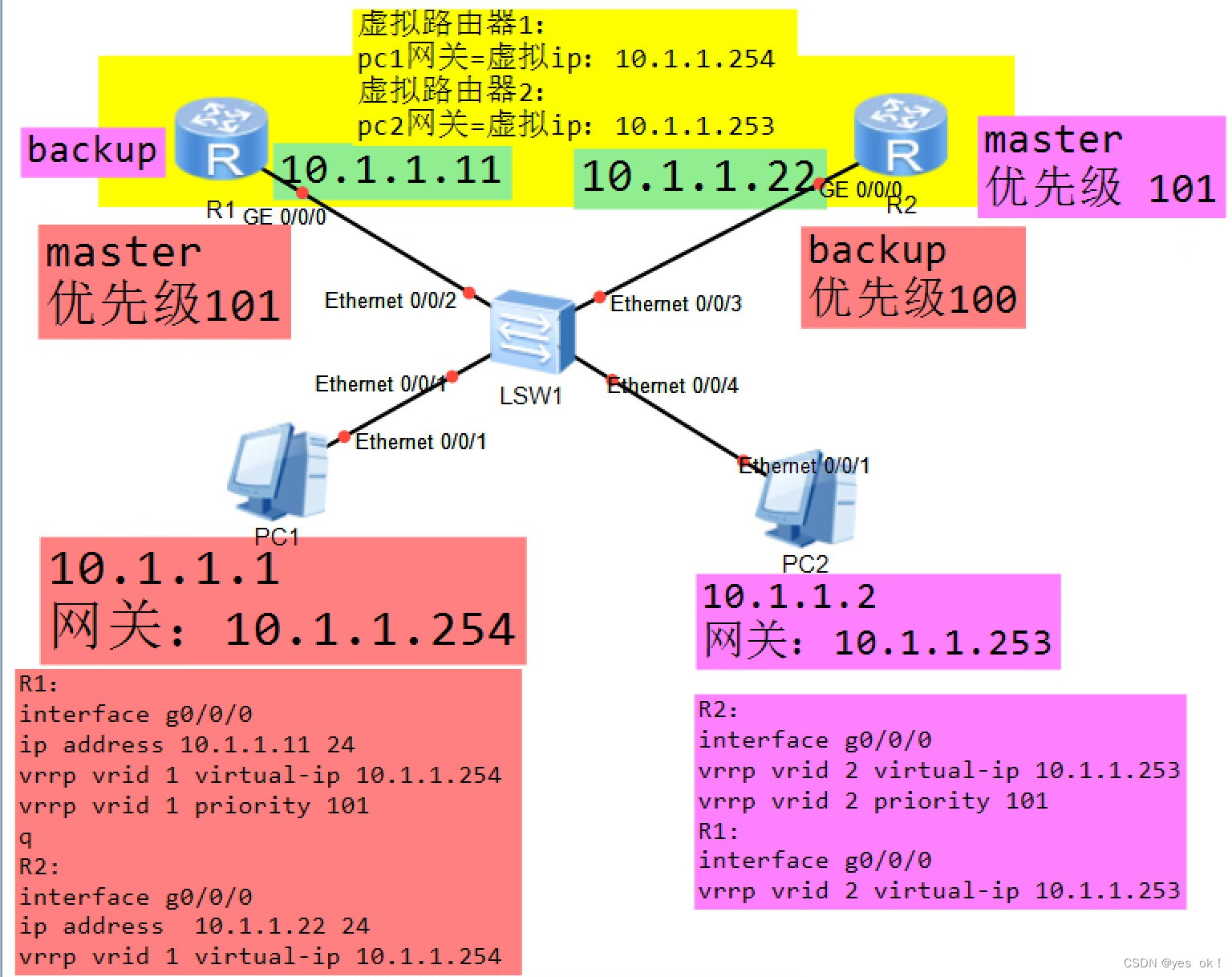
VRRP协议-负载分担配置【分别在路由器与交换机上配置】
VRRP在路由器与交换机上的不同配置 一、使用路由器实现负载分担二、使用交换机实现负载分担一、使用路由器实现负载分担 使用R1与R2两台设备分别进行VRRP备份组 VRRP备份组1,虚拟pc1的网关地址10.1.1.254 VRRP备份组2,虚拟pc2的网关地址10.1.1.253
①备份组1的vrid=1,vrip=…