源自:控制与决策
作者:马旭淼 徐德
“人工智能技术与咨询” 发布
摘 要
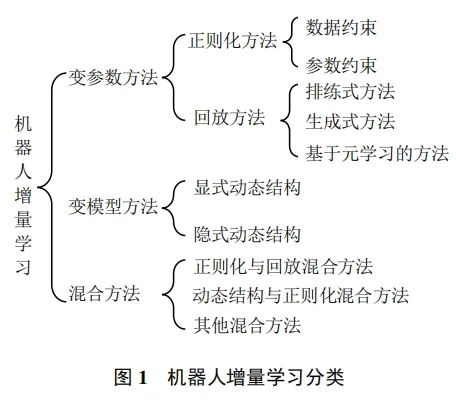
机器人的应用场景正在不断更新换代,数据量也在日益增长.传统的机器学习方法难以适应动态的环境,而增量学习技术能够模拟人类的学习过程,使机器人能利用旧知识来加快新任务的学习,在不遗忘旧技能的前提下学习新的技能.目前对于机器人增量学习的相关研究仍然较少,对此,主要介绍机器人增量学习研究进展.首先,对增量学习进行简介;其次,从参数和模型的角度出发,将当前机器人增量学习主流方法分为变参数方法、变模型方法、混合方法3类,分别对每一类进行论述,并给出相应的增量学习技术在机器人领域中的应用实例;然后,对机器人增量学习中常用的数据集和评价指标进行介绍;最后,对增量学习未来的发展趋势进行展望.
关键词
增量学习;变参数方法;变模型方法;混合方法;技能学习;机器人
引言

1 增量学习简介
2 机器人增量学习方法


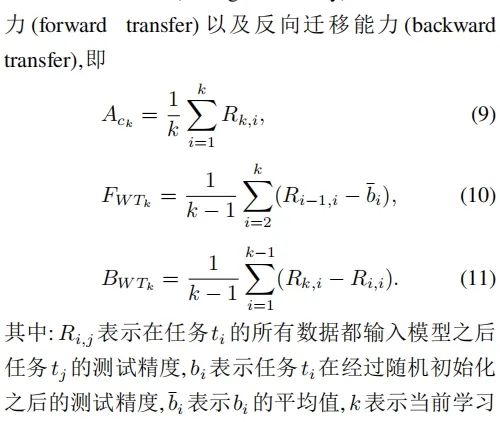
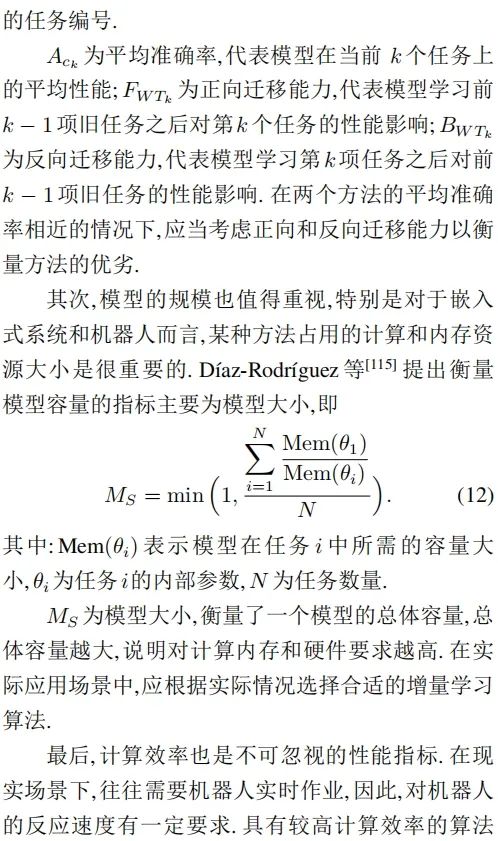
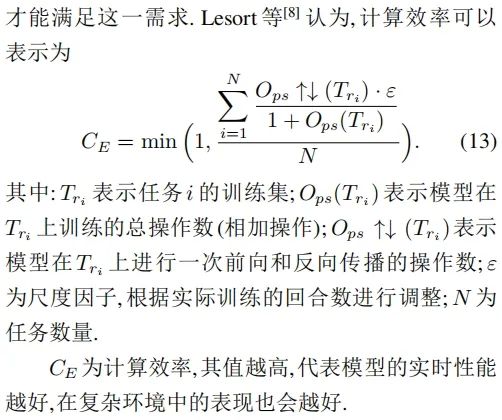
3 数据集与评价指标
4 未来研究趋势

5 结 论
声明:公众号转载的文章及图片出于非商业性的教育和科研目的供大家参考和探讨,并不意味着支持其观点或证实其内容的真实性。版权归原作者所有,如转载稿涉及版权等问题,请立即联系我们删除。
“人工智能技术与咨询” 发布


![[Linux][网络][协议技术][DNS][ICMP][ping][traceroute][NAT]详细讲解](https://img-blog.csdnimg.cn/direct/868c6a49c3df45b1b5dc8f7d7a68a193.png)