文章目录
- 介绍
- 工作原理
- 特点
- 常见参数
介绍
在汽车碰撞事故中,有大约15%的事故是因为倒车时汽车的后视能力不足引起的,因为增加汽车的后视能力的超声波雷达的研究成为了当下的热点之一。安全避免碰撞的前提是快速准确的测量障碍物于汽车之间的距离。超声波雷达是通过发射和接收某一频率的超声波,根据时间差计算出障碍物距离。超声波的测量精度大约为1~3cm,其构造一般分为等方性传感器和异方性传感器。等方性传感器为水平角度和垂直角度相同,而异方性传感器的水平角度和垂直角度不相同。等方性传感器由于垂直探测角度过大,容易探测到地面,也无法侦测到较远的障碍物;异方性传感器则由于其探头产生的超声波波形强弱不稳定,容易产生误报的情况。
超声波雷达技术方案一般有模拟式、四线式数位、二线式数位、三线式主动数位四种方案。模拟式、四线式数位、二线式数位对于信号干扰的处理效果逐渐提升;在技术难度、装配以及价格上各有优劣,整体来看呈递进趋势。对于三线式主动数位超声波雷达,每个超声波雷达内部带有CPU,能独立自主的完成信号的收发和处理,基本上不存在信号传输上的损失和干扰;此外还具有良好的EMC和EMI性能。
常见的超声波雷达可以划分为两种:一种是安装在汽车前后保险杠,主要用于测量汽车前后障碍物距离信息,称为超声波驻车辅助传感器(Ultrasonic Parking Assistant - UPA);另一种是安装在汽车侧面,主要用于测量汽车侧边障碍物距离,称为自动泊车辅助传感器(Automatic Parking Assistant - APA)。
工作原理
超声波的指向性强,能量消耗慢,遇到障碍物之后回波效率高,是较为良好的测距载体。测距时,由超声波发生器和接收器完成超声波的发射和接收,定时器负责计时。具体的步骤如下:
1. 发射器向指定方向发生超声波并启动计时器计时;
2. 超声波在介质中传播,遇到障碍物之后发生回来;
3. 接收器接收反射波之后立即停止计时。
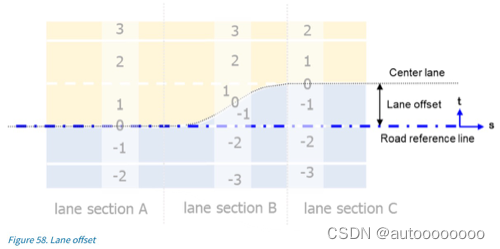
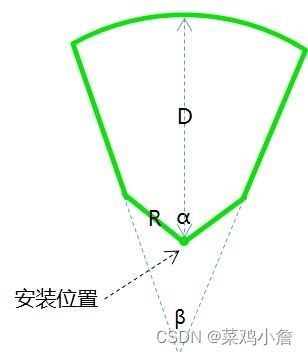
超声波雷达的工作范围图的数学模型可以参考下方图片。其中α为超声波雷达的探测角,通常来讲UPA的角度约为120°,APA的角度约为80°;β为超声波雷达检测宽度范围的影响元素,通常来讲β的值较小,UPA通常为20°,APA比较特殊,为0°。R也是影响超声波雷达检测宽度的影响元素,在这个参数上UPA和APA的差异不大,大约为0.6m左右;D是超声波雷达的量程,UPA的量程一般为2m~2.5m,APA的最大量程可达到5m以上,目前已有7m量程的APA雷达量产了。
特点
超声波能量消耗较为缓慢,防水防尘,即便存在一定的泥沙遮挡覆盖也不影响整体的性能,此外在介质中传播距离远,穿透性强,测距方法简单,成本优势明显,对于光线条件的依赖也很小。在短距离的测量里,超声波雷达存在着天然的优势。
超声波是一种机械波,也就意味着存在一些局限性:
1. 对温度敏感。超声波雷达的测距原理为距离=传播速度*传播时间/2。不同的是激光雷达和毫米波雷达的波速都为光速,而超声波雷达的波速跟温度有关。近似关系如下:C = C0 + 0.607 ∗ T,C0为零度时的声波速度332m/s,T为温度(单位:℃)。对传感器精度要求极高的自动驾驶系统来说,要么选择将超声波雷达的测距进行保守计算;要么将温度信息引入自动驾驶系统,提升测量精度。在现阶段来讲,一般在超声波技术协议中都会引入温度补偿模块。
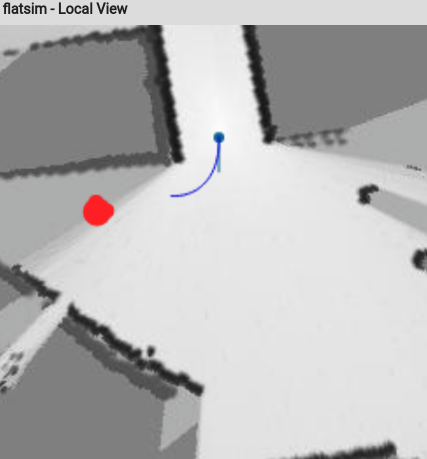
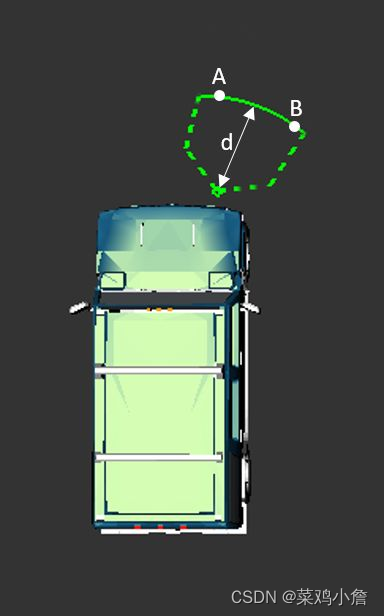
2. 超声波散射角大,方向性差,无法精确描述障碍物位置。超声波雷达在工作时会返回一个探测距离的值,如图所示。处于A处和处于B处的障碍物都会返回相同的探测距离d。所以在仅知道探测距离d的情况下,通过单个雷达的信息是无法确定障碍物是在A处还是在B处的。在此背景下,ADAS功能中会引入多个超声波雷达来避免这个问题。
常见参数
1. 超声波发声压 —— 声音通过空气的振动所产生的压强,简称声压。单位:帕斯卡(Pa)。
2. 超声波发射声压级 —— 把声压的有效值取对数来表示声音的强弱,这种表示声音强弱的数值叫做声压级。单位分贝(dB)。
3. 超声波信号频谱 —— 频谱为频率密度谱的简称,是频率的分布曲线。由于超声波振动并非标准单一正弦振动而是复杂振动,因此可通过将该振动分解为振幅不同和频率不同的谐振荡,将这些谐振荡的幅值按频率排列的图形即为频谱。
4. 超声波发射信号中心频率 —— 通常来说中心频率即为信号频谱图上幅值最大的频点。单位:赫兹(Hz)。
5. 余振时间 —— 超声波雷达在停止发射信号后由于机械振动的惯性,会导致振动信号无法立刻衰减为零,需要一定时间才可完全衰减。在这段时间内,余振与回波信号无法区分,因此余振时间长短决定超声波雷达的盲区大小。单位:毫秒(ms)
6. 超声波发射方向图 —— 超声波雷达在发射超声波时,沿传感器中轴线的方向上发射能量最大,由此向外能量逐渐减弱,发射方向图即为衡量发射能量随角度的分布。以雷达法线方向为0°基准,该角度所发射信号功率为基准功率,偏离不同角度所发射信号功率与基准功率的dB差值,即可得到方向图。
7. 超声波接收灵敏度 —— 超声波雷达对接收到信号的敏感程度,即可将单位声压信号转化为多大幅度电信号。单位:V/Pa。
/8. 超声波水平检测范围 —— 超声波传感器在水平平面能够检测到物体的范围。
9. 超声波垂直检测范围 —— 超声波传感器在垂直平面能够检测到物体的范围。