使用 Isaac Sight可视化
本节介绍如何使用 Isaac Sight 检查导航堆栈,机器人上当前发生的情况。 Sight 使用 Isaac 节点,该节点运行可在设备上连接的 Web 服务。 通过在 Chrome 网络浏览器中导航到 http://localhost:3000 来启动 Isaac Sight。 (其他浏览器可能可以工作,但在此版本中不受正式支持。)
ISAAC教程合集地址: https://blog.csdn.net/kunhe0512/category_12163211.html
文章目录
- 使用 Isaac Sight可视化
- 地图视图
- 本地视图
当您打开 Isaac Sight 时,您将看到类似于以下的视图:
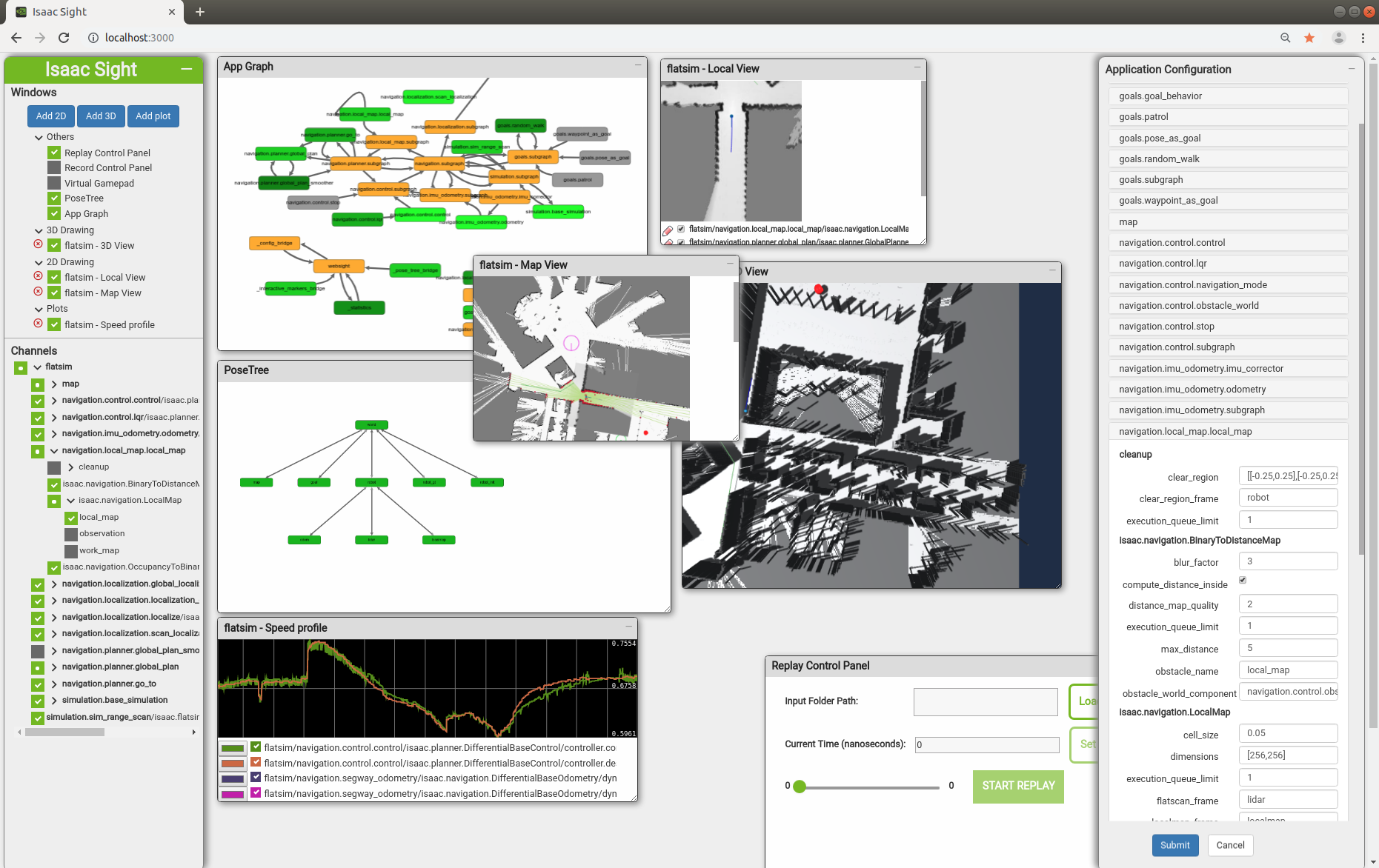
在中间部分,您可以看到带有 2D 绘图的多个窗口,这些窗口可视化导航堆栈的各个方面。 每次启动 flatsim、navsim_navigate 或 carter 应用程序时,其中一些绘图会默认出现。 绘图和绘图由各种渠道组成,具有机器人应用程序发布的可视化数据。
左侧是带有可视化数据的可用通道列表。 这些直接发布在导航堆栈的小码内。 一个典型的机器人应用程序可以包含数百个具有可视化数据的通道。 可以使用名称旁边的复选框禁用频道。 对于禁用的通道,可视化数据不再从应用程序发送到前端,并且数据将不再在前端更新。 它仍然可见以允许检查已接收的数据。
使用频道名称来追踪数据发布的位置。 例如,名称为 flatsim/local_map/isaac.navigation.LocalMap/local_map 的通道是由应用程序 flatsim 中名为 local_map 的节点发布的,具体而言是由该节点中名为 isaac.navigation.LocalMap 的组件发布的(这是默认名称 对于类型为 isaac::navigation::LocalMap 的组件。此组件在标签 local_map 下发布此数据,这是频道名称的最后一部分。
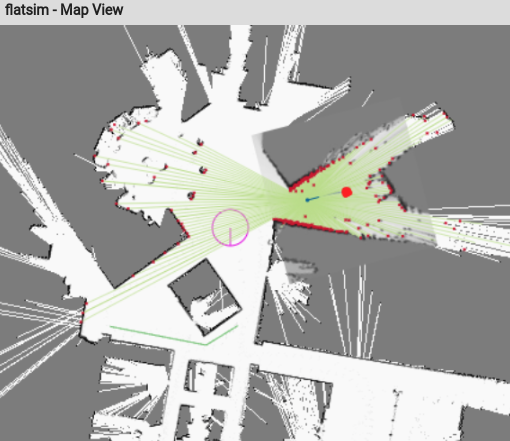
地图视图
地图视图显示有关机器人在其环境中的高级信息。 使用它可以快速了解当前正在发生的事情。 使用 flatsim 或 navsim_navigate 应用程序在模拟中运行导航堆栈时的可视化与使用 carter 应用程序的真实机器人基本相同。 当使用 navsim_navigate 或 carter 应用程序时,3D 点云可视化也可用。
-
背景:全局视图将环境地图显示为黑色/灰色/白色占用网格图。 黑色方格表示有东西挡住了机器人的去路,而白色方格表示路径畅通。 灰色区域表示机器人不知道道路是否畅通无阻。
-
机器人位姿估计:机器人的估计位姿显示为带有小缺口的蓝色圆圈。 定位器使用多模态假设估计器,因此可以显示姿态略有不同的多个机器人姿态指示器。
-
目标和路径:当前目标点和全局规划器计算的路径以红色和蓝色显示。 还显示了计算全局计划的最后位置。
-
当前测量:当前测量的激光束显示为浅绿色。 激光束撞击障碍物的端点显示为红色圆圈。 它从机器人姿态的当前最佳估计的角度显示的范围扫描。 如果机器人定位良好,则光束端点与地图中的块状单元匹配。
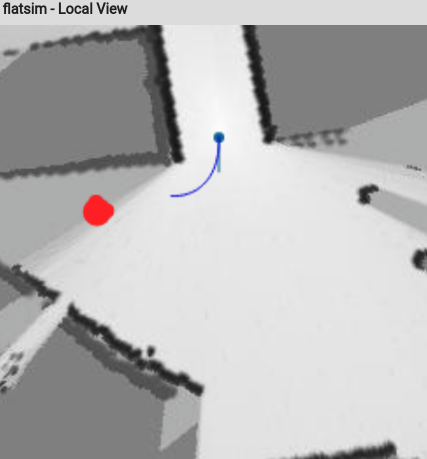
本地视图
此视图显示了机器人周围的障碍物。 它可用于分析机器人可能无法移动或无法到达所需目标的原因。
-
背景:背景在动态网格图中显示机器人周围的障碍物。 网格根据当前传感器测量值不断更新。
-
机器人姿态:由于网格地图始终以机器人为中心,因此机器人出现在上半部分视图中的固定位置。 在此视图中,机器人的前进方向是向下的。
-
当前计划:显示了轨迹规划器的局部计划和基于图形的规划器的全局计划。 机器人尝试遵循轨迹生成器的计划。