前言
上一篇文章已经介绍了如何用STM32单片机中的TIMER定时器来控制LED灯的交替闪烁,实现了点灯的第五种方式。这篇文章我们来介绍一下如何用STM32单片机中的定时器的PWM波来实现LED的“呼吸”。
一、实验原理
关于定时器这边就不多加赘述,详细请看上一篇文章,链接放在下面了
STM32(五):TIMER定时器 (标准库函数)
这边我们介绍一下PWM
1.PWM的介绍
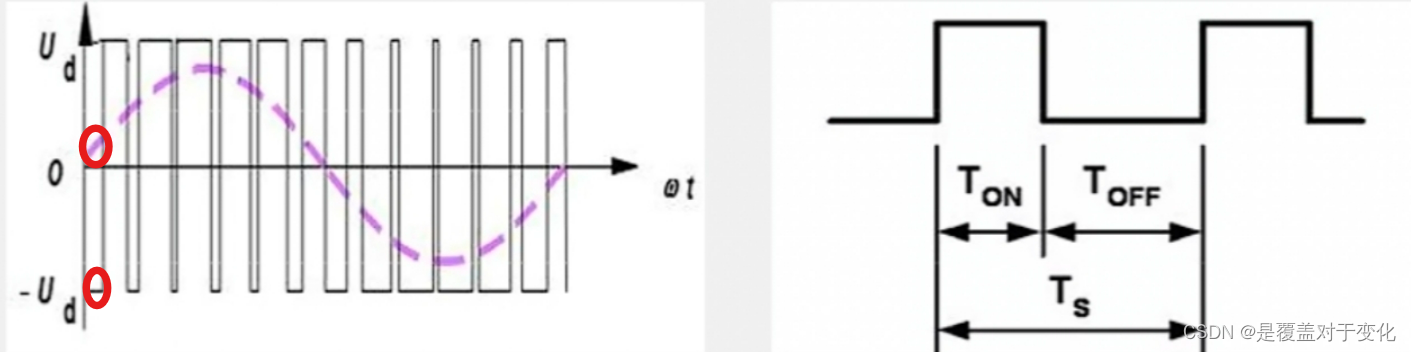
PWM的全称是脉冲宽度调制(Pulse-width modulation),是指在具有惯性的系统中,可以通过对一系列脉冲的宽度进行调制,来等效的地获得所需要的模拟参量,常应用于电机控速等领域。在STM32微控制器的应用中,PWM技术也非常重要,因为它能够提供精确的信号控制,从而达到对设备行为的精确管理。
- 频率:一秒钟内从高电平时间在到低电平时间,再从低电平跳到高电平的瞬间次数,也就是一秒钟内有多少个PWM的周期,f = 1/Ts。
- 周期:一秒钟内从高电平时间在到低电平时间,Ts= 1/f。
- PWM信号产生:用于控制电机速度、灯光亮度等。
- 占空比:一个周期内高电平时间和总时间的比值,Ton/Ts。
- 分辨率:占空比变化步距。
2.PWM参数计算公式
PWM主要参数计算公式如下所示:
- PWM频率 Freq=CK_PSC/[(PSC+1) (ARR+1)], CK_PSC=72M
- PWM占空比=CCR/(ARR+1)
- PWM分辨率=1/(ARR+1)
3.PWM工作原理
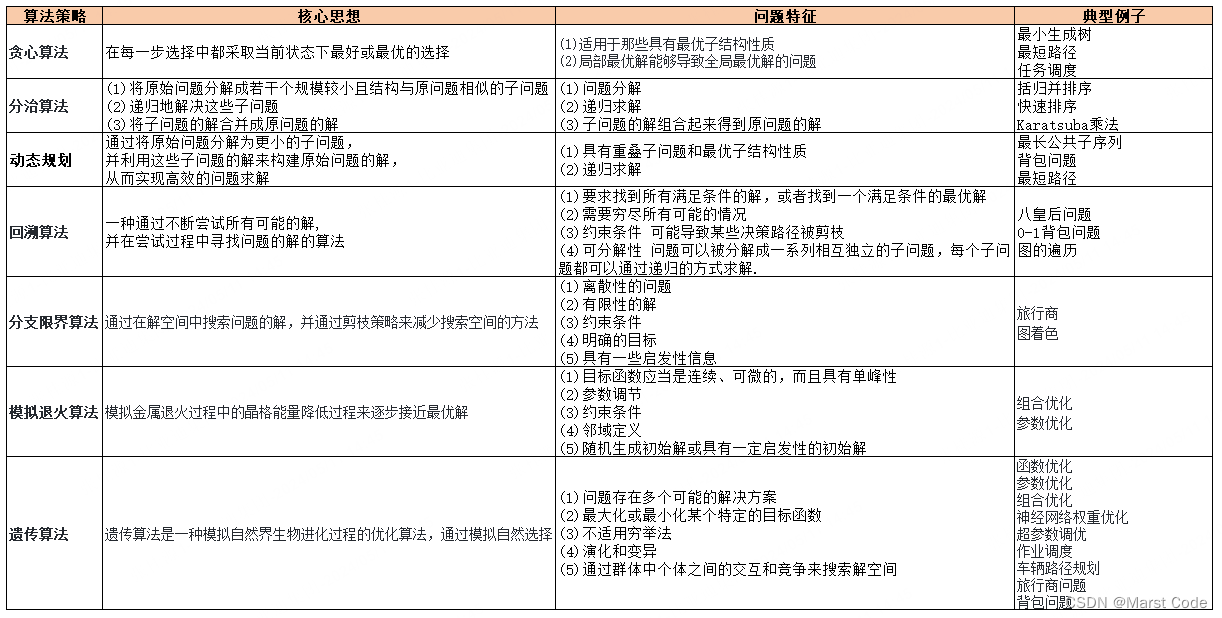
以下是PWM输入模式时序的工作原理图,以下对其符号进行简单的解释说明
- T1:PWM信号的波形,显示了信号的高电平和低电平状态。
- TIMx_CNT :定时器的计数器(Counter),它的值会在定时器时钟的脉冲下从0开始增加,直到达到自动重载寄存器(ARR)的值后归零,循环开始新的周期。
- TIMx_CCR1 和 TIMx_CCR2 :捕捉/比较寄存器(Capture/Compare Register),用于设置PWM的高电平宽度。它们的值决定了在计数器达到这些值时输出比较匹配事件,影响PWM输出信号的占空比。
- TIMx_CCR1 设置为
0004,代表在计数器计数到4时,第一个通道的PWM输出从高电平跳变到低电平。- TIMx_CCR2 设置为
0002,代表在计数器计数到2时,第二个通道的PWM输出从高电平跳变到低电平。

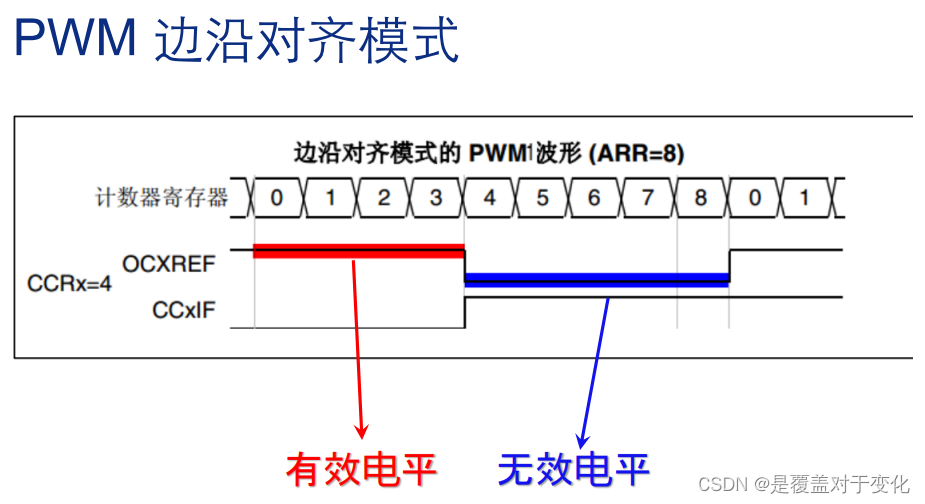
接下来简单介绍一下PWM信号的一个典型的边缘对齐模式,
- ARR = 8:设置了定时器的计数上限,决定了PWM周期的长度,计数器会从0计数到8,然后重置为0,开始新的周期。
- CCRx = 4:决定了PWM信号从高电平变为低电平的切换点,当计数器计数到4时,输出信号从高电平切换到低电平。
- 红线(有效电平):PWM输出从高电平切换到低电平的时刻,即在计数器值等于CCR值时,输出发生变化。
- 蓝线(无效电平):PWM输出在一个完整的周期结束时仍然是低电平。
CCxIF:捕捉/比较中断标志,当定时器的计数器值与CCR寄存器的预设值相匹配时,该标志被设置。
OCxREF:输出比较引用信号,通常与PWM的实际输出相对应,反映了PWM信号的状态更改。
二、实验步骤
1.引脚设置
这边在h文件的宏定义中定义即可
static void GENERAL_TIMx_GPIO_Config(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
/* 使能定时器始终:设置TIM3CLK 为 72MHZ */
GENERAL_TIM_APBxClock_FUN (GENERAL_TIM_CLK, ENABLE);
/* 使能定时器通道引脚GPIO时钟 */
GENERAL_TIM_GPIO_APBxClock_FUN(GENERAL_TIM_GPIO_CLK1|GENERAL_TIM_GPIO_CLK1, ENABLE);
/* 配置定时器通道3输出引脚模式:复用推挽输出模式 */
GPIO_InitStructure.GPIO_Pin = GENERAL_TIM_PIN1;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GENERAL_TIM_PORT1, &GPIO_InitStructure);
}2.时钟中断
时钟中断函数void NVIC_Config_PWM(void),这边是对中断来源以及优先级的配置,前面在Systick中有所介绍,可以看一下之前的连接:STM32(四):Systick (标准库函数)-CSDN博客
static void NVIC_Config_PWM(void)
{
NVIC_InitTypeDef NVIC_InitStructure;
/* 选择中断优先级配置组为2个抢占式优先级和2个子优先级,可以参考misc.h文件了解相关设置 */
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_1);
/* 配置TIM3_IRQ中断为中断源 */
NVIC_InitStructure.NVIC_IRQChannel = GENERAL_TIMx_IRQn;
/* 设置抢占式优先级为0 */
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0;
/* 设置子优先级为3 */
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 2;
/* 使能外部中断通道 */
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructure);
}
但到这里我们的中断配置还没结束!!重点!!易踩坑!!
我们还需要在stm32f10x_it.c的文件里面加上新的中断服务函数 GENERAL_TIMx_IRQHandler (),记得加上头文件,例如:
#include "bsp/GeneralTIM/bsp_GeneralTIM.h"
extern uint8_t indexWave[];
void GENERAL_TIMx_IRQHandler(void)
{
static uint8_t pwm_index = 0; /* 用于PWM查表 */
static uint8_t period_cnt = 0; /* 用于计算周期数 */
/* 定时器更新中断 */
if (TIM_GetITStatus(GENERAL_TIMx, TIM_IT_Update) != RESET)
{
period_cnt++;
/* 若输出的周期数大于20,输出下一种脉冲宽的PWM波 */
if(period_cnt >= 20)
{
/* 根据PWM表修改定时器的比较寄存器值 */
GENERAL_TIMx->GENERAL_TIM_CCRx = indexWave[pwm_index];
/* 标志PWM表的下一个元素 */
pwm_index++;
/* 若PWM脉冲表已经输出完成一遍,重置PWM查表标志 */
if( pwm_index >= 40)
{
pwm_index=0;
}
/* 重置周期计数标志 */
period_cnt=0;
}
/* 必须要清除中断标志位 */
TIM_ClearITPendingBit (GENERAL_TIMx, TIM_IT_Update);
}
}3.定时器配置
定时周期和预分频需要根据实际需要进行调整,而这边TIM_Pulse=0是因为我们给了一个脉冲配置的数组indexWave[],若不用,调整这个大小会改变“呼吸”的速率。
static void GENERAL_TIMx_Configuration(void)
{
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
TIM_OCInitTypeDef TIM_OCInitStructure;
/* 当定时器从0计数到255,即为256次,为一个定时周期 */
TIM_TimeBaseStructure.TIM_Period = 255;
/* 设置预分频:不预分频,即为72MHz,输出脉冲频率:72MHz/(1999+1)/(255+1) */
TIM_TimeBaseStructure.TIM_Prescaler = 1999;
/* 设置时钟分频系数:不分频(这里用不到) */
TIM_TimeBaseStructure.TIM_ClockDivision = TIM_CKD_DIV1 ;
/* 向上计数模式 */
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up;
TIM_TimeBaseInit(GENERAL_TIMx, &TIM_TimeBaseStructure);
/* 模式配置:PWM模式1 */
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1;
/* 输出状态设置:使能输出 */
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable;
/* 设置跳变值,当计数器计数到这个值时,电平发生跳变 */
TIM_OCInitStructure.TIM_Pulse = 0;
/* 当定时器计数值小于CCR1_Val时为低电平 */
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High;
/* 初始化定时器通道1输出PWM */
GENERAL_TIM_OCxInit(GENERAL_TIMx, &TIM_OCInitStructure);
/* 定时器比较输出通道1预装载配置:使能预装载 */
GENERAL_TIM_OCxPreloadConfig(GENERAL_TIMx, TIM_OCPreload_Enable);
/* 使能定时器重载寄存器ARR */
TIM_ARRPreloadConfig(GENERAL_TIMx, ENABLE);
/* 使能定时器 */
TIM_Cmd(GENERAL_TIMx, ENABLE);
/* 配置NVIC */
NVIC_Config_PWM();
/* 定时器更新中断 */
TIM_ITConfig(GENERAL_TIMx, TIM_IT_Update, ENABLE);
}
4.PWM信号初始化
void GENERAL_TIMx_PWM_Init(void)
{
GENERAL_TIMx_GPIO_Config();
GENERAL_TIMx_Configuration();
}
三、实操代码
程序分为3个文件:bsp_GeneralTIM.c、bsp_GeneralTIM.h、main.c
1.bsp_GeneralTIM.c
#include "bsp/GeneralTIM/bsp_GeneralTIM.h"
uint8_t indexWave[] = {1,1,2,2,3,4,6,8,10,14,19,25,33,44,59,80,107,143,191,255,
255,191,143,107,80,59,44,33,25,19,14,10,8,6,4,3,2,2,1,1};
/**
* 函数功能: 配置TIMx复用输出PWM时用到的I/O
*/
static void GENERAL_TIMx_GPIO_Config(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
/* 使能定时器始终:设置TIM3CLK 为 72MHZ */
GENERAL_TIM_APBxClock_FUN (GENERAL_TIM_CLK, ENABLE);
/* 使能定时器通道引脚GPIO时钟 */
GENERAL_TIM_GPIO_APBxClock_FUN(GENERAL_TIM_GPIO_CLK1|GENERAL_TIM_GPIO_CLK1, ENABLE);
/* 配置定时器通道3输出引脚模式:复用推挽输出模式 */
GPIO_InitStructure.GPIO_Pin = GENERAL_TIM_PIN1;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GENERAL_TIM_PORT1, &GPIO_InitStructure);
}
/**
* 函数功能: 配置嵌套向量中断控制器NVIC
*/
static void NVIC_Config_PWM(void)
{
NVIC_InitTypeDef NVIC_InitStructure;
/* 选择中断优先级配置组为2个抢占式优先级和2个子优先级,可以参考misc.h文件了解相关设置 */
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_1);
/* 配置TIM3_IRQ中断为中断源 */
NVIC_InitStructure.NVIC_IRQChannel = GENERAL_TIMx_IRQn;
/* 设置抢占式优先级为0 */
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0;
/* 设置子优先级为3 */
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 2;
/* 使能外部中断通道 */
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructure);
}
/**
* 函数功能: 配置TIMx输出的PWM信号的模式,如周期、极性、占空比
*/
static void GENERAL_TIMx_Configuration(void)
{
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
TIM_OCInitTypeDef TIM_OCInitStructure;
/* 定时器基本参数始终 */
/* 当定时器从0计数到255,即为256次,为一个定时周期 */
TIM_TimeBaseStructure.TIM_Period = 255;
/* 设置预分频:不预分频,即为72MHz,输出脉冲频率:72MHz/(1999+1)/(255+1) */
TIM_TimeBaseStructure.TIM_Prescaler = 1999;
/* 设置时钟分频系数:不分频(这里用不到) */
TIM_TimeBaseStructure.TIM_ClockDivision = TIM_CKD_DIV1 ;
/* 向上计数模式 */
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up;
TIM_TimeBaseInit(GENERAL_TIMx, &TIM_TimeBaseStructure);
/* 定时器输出通道1模式配置 */
/* 模式配置:PWM模式1 */
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1;
/* 输出状态设置:使能输出 */
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable;
/* 设置跳变值,当计数器计数到这个值时,电平发生跳变 */
TIM_OCInitStructure.TIM_Pulse = 0;
/* 当定时器计数值小于CCR1_Val时为低电平 */
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High;
/* 初始化定时器通道1输出PWM */
GENERAL_TIM_OCxInit(GENERAL_TIMx, &TIM_OCInitStructure);
/* 定时器比较输出通道1预装载配置:使能预装载 */
GENERAL_TIM_OCxPreloadConfig(GENERAL_TIMx, TIM_OCPreload_Enable);
/* 使能定时器重载寄存器ARR */
TIM_ARRPreloadConfig(GENERAL_TIMx, ENABLE);
/* 使能定时器 */
TIM_Cmd(GENERAL_TIMx, ENABLE);
/* 配置NVIC */
NVIC_Config_PWM();
/* 定时器更新中断 */
TIM_ITConfig(GENERAL_TIMx, TIM_IT_Update, ENABLE);
}
/**
* 函数功能: TIMx输出PWM信号初始化
* 说 明:只要调用这个函数TIMx的通道就会有PWM信号输出
*/
void GENERAL_TIMx_PWM_Init(void)
{
GENERAL_TIMx_GPIO_Config();
GENERAL_TIMx_Configuration();
}
2.bsp_GeneralTIM.h
#ifndef __GENERAL_TIM_H__
#define __GENERAL_TIM_H__
/* 包含头文件 ----------------------------------------------------------------*/
#include <stm32f10x.h>
/* 类型定义 ------------------------------------------------------------------*/
/* 宏定义 --------------------------------------------------------------------*/
#define GENERAL_TIMx TIM3
#define GENERAL_TIM_APBxClock_FUN RCC_APB1PeriphClockCmd
#define GENERAL_TIM_CLK RCC_APB1Periph_TIM3
#define GENERAL_TIM_GPIO_APBxClock_FUN RCC_APB2PeriphClockCmd
#define GENERAL_TIM_GPIO_CLK1 RCC_APB2Periph_GPIOA
#define GENERAL_TIM_PORT1 GPIOA
#define GENERAL_TIM_PIN1 GPIO_Pin_11
#define GENERAL_TIM_OCxInit TIM_OC3Init
#define GENERAL_TIM_OCxPreloadConfig TIM_OC3PreloadConfig
#define GENERAL_TIM_CCRx CCR3
#define GENERAL_TIMx_IRQn TIM3_IRQn //中断
#define GENERAL_TIMx_IRQHandler TIM3_IRQHandler
/* 扩展变量 ------------------------------------------------------------------*/
/* 函数声明 ------------------------------------------------------------------*/
void GENERAL_TIMx_PWM_Init(void);
#endif /* __GENERAL_TIM_H__ */
3.main.c
/* 包含头文件 ----------------------------------------------------------------*/
#include "stm32f10x.h"
#include "bsp/led/bsp_led.h"
#include "bsp/key/bsp_key.h"
#include "bsp/delay/delay.h"
#include "bsp/systick/bsp_SysTick.h"
#include "bsp/GeneralTIM/bsp_GeneralTIM.h"
/* 函数体 --------------------------------------------------------------------*/
/**
* 函数功能: 主函数.
*/
int main(void)
{
/* 初始化定时器PWM输出 */
GENERAL_TIMx_PWM_Init();
while (1)
{
//空
}
}
四、实验效果
呼吸灯
结束语
本文以STM32VET6为例讲解了用STM32单片机中用定时器的PWM波来实现LED的“呼吸”,并指出其中的易坑点。希望对大家有所帮助!如果还有什么问题,欢迎评论区留言,谢谢!