本系统学习利用的是正点原子的阿尔法mini开发板,本系列的学习笔记也是按照正点原子的教程进行学习,但并不是利用虚拟机进行开发,而是使用Windows下的子系统WSL进行学习。
因为 Cortex-A 芯片一上电 SP 指针还没初始化,C 环境还没准备好,所以肯定不能运行 C 代码,必须先用汇编语言设置好 C 环境,比如初始化 DDR、设置 SP指针等等,当汇编把 C 环境设置好了以后才可以运行 C 代码。所以 Cortex-A 一开始肯定是汇编代码。
一、汇编基础
1、 GNU 汇编语法
GNU 语法每行一条语句,每条语句有三个可选部分,如下:
label:instruction @ commentlabel 即标号,表示地址位置
instruction 即指令,也就是汇编指令或伪指令。
@后面的是注释,也可以使用“/*”和“*/”来注释。
例:
add:
MOVS R0, #0X12 @设置 R0=0X12上面代码中“add:”就是标号,“MOVS R0,#0X12”就是指令,最后的“@设置 R0=0X12”就是注释
2、.section 伪操作
用户可以使用.section 伪操作来定义一个段,汇编系统预定义了一些段名:
| 预定义段名 | 含义 |
| .text | 表示代码段。 |
| .data | 初始化的数据段。 |
| .bss | 未初始化的数据段。 |
| .rodata | 只读数据段。 |
也可以用.section自定义一个段,例:
.section .testsection @定义一个 testsetcion 段3、入口标号
汇编程序的默认入口标号是_start,不过我们也可以在链接脚本中使用 ENTRY 来指明其它的入口点,下面的代码就是使用_start 作为入口标号:
.global _start
_start:
ldr r0, =0x12 @r0=0x12上面代码中.global 是伪操作,表示_start 是一个全局标号,类似 C 语言里面的全局变量一样,常见的伪操作有:
.byte 定义单字节数据,比如.byte 0x12。
.short 定义双字节数据,比如.short 0x1234。
.long 定义一个 4 字节数据,比如.long 0x12345678。
.equ 赋值语句,格式为:.equ 变量名,表达式,比如.equ num, 0x12,表示 num=0x12。
.align 数据字节对齐,比如:.align 4 表示 4 字节对齐。
.end 表示源文件结束。
.global 定义一个全局符号,格式为:.global symbol,比如:.global _start。
4、函数
GNU 汇编同样也支持函数,函数格式如下:
函数名:
函数体
返回语句
GNU 汇编函数返回语句不是必须的,如下代码就是用汇编写的 Cortex-A7 中断服务函数:
/* 未定义中断 */
Undefined_Handler:
ldr r0, =Undefined_Handler
bx r0
/* SVC 中断 */
SVC_Handler:
ldr r0, =SVC_Handler
bx r0
/* 预取终止中断 */
PrefAbort_Handler:
ldr r0, =PrefAbort_Handler
bx r0上述代码中定义了三个汇编函数:Undefined_Handler、SVC_Handler 和PrefAbort_Handler。以函数 Undefined_Handler 为例我们来看一下汇编函数组成,“Undefined_Handler”就是函数名,“ldr r0, =Undefined_Handler”是函数体,“bx r0”是函数返回语句,“bx”指令是返回指令,函数返回语句不是必须的。
5、MOV 指令
MOV 指令用于将数据从一个寄存器拷贝到另外一个寄存器,或者将一个立即数传递到寄存器里面,使用示例如下:
MOV R0,R1 @将寄存器 R1 中的数据传递给 R0,即 R0=R1
MOV R0, #0X12 @将立即数 0X12 传递给 R0 寄存器,即 R0=0X12
6、MRS 指令
MRS 指令用于将特殊寄存器(如 CPSR 和 SPSR)中的数据传递给通用寄存器,要读取特殊寄存器的数据只能使用 MRS 指令!使用示例如下:
MRS R0, CPSR @将特殊寄存器 CPSR 里面的数据传递给 R0,即 R0=CPSR
7、MSR 指令
MSR 指令和 MRS 刚好相反,MSR 指令用来将普通寄存器的数据传递给特殊寄存器,也就是写特殊寄存器,写特殊寄存器只能使用 MSR,使用示例如下:
MSR CPSR, R0 @将 R0 中的数据复制到 CPSR 中,即 CPSR=R0
8、存储器访问指令
常用的存储器访问指令有两种:LDR 和STR,用法如表 所示:
| 指令 | 描述 |
| LDR Rd, [Rn , #offset] | 从存储器 Rn+offset 的位置读取数据存放到 Rd 中。 |
| STR Rd, [Rn, #offset] | 将 Rd 中的数据写入到存储器中的 Rn+offset 位置。 |
(1)、LDR 指令
LDR 主要用于从存储加载数据到寄存器 Rx 中,LDR 也可以将一个立即数加载到寄存器 Rx中,LDR 加载立即数的时候要使用“=”,而不是“#”。在嵌入式开发中,LDR 最常用的就是读取 CPU 的寄存器值,比如 I.MX6UL 有个寄存器 GPIO1_GDIR,其地址为 0X0209C004,我们现在要读取这个寄存器中的数据,示例代码如下:
LDR R0, =0X0209C004 @将寄存器地址 0X0209C004 加载到 R0 中,即 R0=0X0209C004
LDR R1, [R0] @读取地址 0X0209C004 中的数据到 R1 寄存器中
上述代码就是读取寄存器 GPIO1_GDIR 中的值,读取到的寄存器值保存在 R1 寄存器中,上面代码中 offset 是 0,也就是没有用到 offset。
(2)、STR 指令
LDR 是从存储器读取数据,STR 就是将数据写入到存储器中,同样以 I.MX6UL 寄存器GPIO1_GDIR 为例,现在我们要配置寄存器 GPIO1_GDIR 的值为 0X20000002,示例代码如下:
LDR R0, =0X0209C004 @将寄存器地址 0X0209C004 加载到 R0 中,即 R0=0X0209C004
LDR R1, =0X20000002 @R1 保存要写入到寄存器的值,即 R1=0X20000002
STR R1, [R0] @将 R1 中的值写入到 R0 中所保存的地址中
LDR 和 STR 都是按照字进行读取和写入的,也就是操作的 32 位数据,如果要按照字节、半字进行操作的话可以在指令“LDR”后面加上 B 或 H,比如按字节操作的指令就是 LDRB 和STRB,按半字操作的指令就是 LDRH 和 STRH。
9、压栈和出栈指令
我们通常会在 A 函数中调用 B 函数,当 B 函数执行完以后再回到 A 函数继续执行。要想再跳回 A 函数以后代码能够接着正常运行,那就必须在跳到 B 函数之前将当前处理器状态保存起来(就是保存 R0~R15 这些寄存器值),当 B 函数执行完成以后再用前面保存的寄存器值恢复R0~R15 即可。保存 R0~R15 寄存器的操作就叫做现场保护,恢复 R0~R15 寄存器的操作就叫做恢复现场。在进行现场保护的时候需要进行压栈(入栈)操作,恢复现场就要进行出栈操作。压栈的指令为 PUSH,出栈的指令为 POP,PUSH 和 POP 是一种多存储和多加载指令,即可以一次操作多个寄存器数据,他们利用当前的栈指针 SP 来生成地址,PUSH 和 POP 的用法如表所示:
| 指令 | 描述 |
| PUSH <reg list> | 将寄存器列表存入栈中。 |
| POP <reg list> | 从栈中恢复寄存器列表。 |
例:
PUSH {R0~R3, R12} @将 R0~R3 和 R12 压栈
PUSH {LR} @将 LR 进行压栈
POP {LR} @先恢复 LR 出栈,后进先出
POP {R0~R3,R12} @在恢复 R0~R3,R12 出栈
10、跳转指令
| 指令 | 描述 |
| B <label> | 跳转到 label,如果跳转范围超过了+/-2KB,可以指定 B.W <label>使用 32 位版本的跳转指令, 这样可以得到较大范围的跳转 |
| BX <Rm> | 间接跳转,跳转到存放于 Rm 中的地址处,并且切换指令集 |
| BL <label> | 跳转到标号地址,并将返回地址保存在 LR 中。 |
| BLX <Rm> | 结合 BX 和 BL 的特点,跳转到 Rm 指定的地址,并将返回地址保存在 LR 中,切换指令集。 |
1、B 指令
B 指令会将 PC 寄存器的值设置为跳转目标地址, 一旦执行 B 指令,ARM 处理器就会立即跳转到指定的目标地址。如果要调用的函数不会再返回到原来的执行处,那就可以用 B 指令,如下示例:
_start:
ldr sp,=0X80200000 @设置栈指针
b main @跳转到 main 函数上述代码就是典型的在汇编中初始化 C 运行环境,然后跳转到 C 文件的 main 函数中运行,上述代码只是初始化了 SP 指针,有些处理器还需要做其他的初始化,比如初始化 DDR 等等。因为跳转到 C 文件以后再也不会回到汇编了,所以在第 3 行使用了 B 指令来完成跳转。
2、BL 指令
BL 指令相比 B 指令,在跳转之前会在寄存器 LR(R14)中保存当前 PC 寄存器值,所以可以通过将 LR 寄存器中的值重新加载到 PC 中来继续从跳转之前的代码处运行,这是子程序调用一个基本但常用的手段。比如 Cortex-A 处理器的 irq 中断服务函数都是汇编写的,主要用汇编来实现现场的保护和恢复、获取中断号等。但是具体的中断处理过程都是 C 函数,所以就会存在汇编中调用 C 函数的问题。而且当 C 语言版本的中断处理函数执行完成以后是需要返回到irq 汇编中断服务函数,因为还要处理其他的工作,一般是恢复现场。这个时候就不能直接使用B 指令了,因为 B 指令一旦跳转就再也不会回来了,这个时候要使用 BL 指令,示例代码如下:
push {r0, r1} @保存 r0,r1
cps #0x13 @进入 SVC 模式,允许其他中断再次进去
bl system_irqhandler @加载 C 语言中断处理函数到 r2 寄存器中
cps #0x12 @进入 IRQ 模式
pop {r0, r1}
str r0, [r1, #0X10] @中断执行完成,写 EOIR上述代码中第 5 行就是执行 C 语言版的中断处理函数,当处理完成以后是需要返回来继续执行下面的程序,所以使用了 BL 指令。
11、算术运算指令
汇编中也可以进行算术运算, 比如加减乘除,常用的运算指令用法如表:

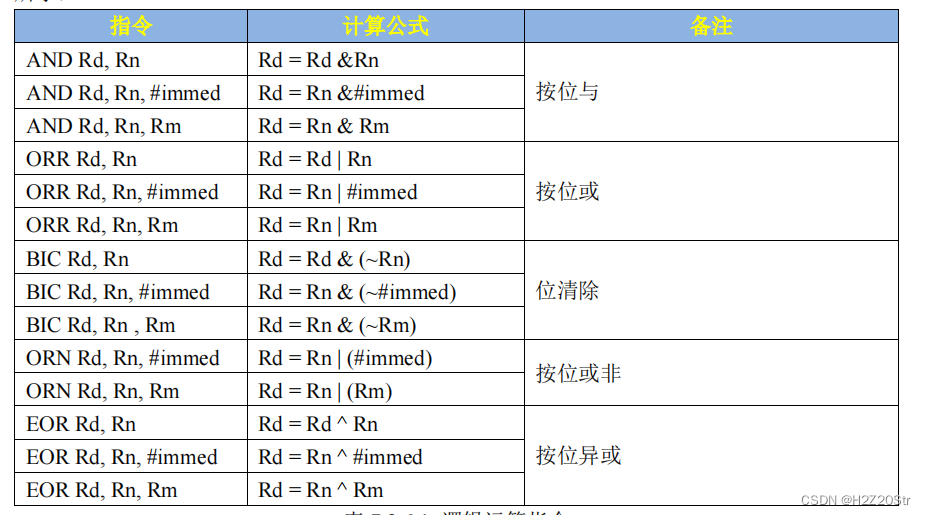
12、逻辑运算指令
逻辑运算符。使用汇编语言的时候也可以使用逻辑运算指令,常用的运算指令用法如表
二、相关寄存器
1、I.MX6U IO 复用
以GPIO1_IO00这个IO口为例:

可以看到GPIO1_IO00有个名为IOMUXC_SW_MUX_CTL_PAD_GPIO1_IO00的寄存器,地址为: 0X020E005C,这个寄存器就是GPIO1_IO00的复用功能寄存器,这个寄存器是 32 位的,但是只用到了最低 5 位,其中bit0~bit3(MUX_MODE)就是设置 GPIO1_IO00 的复用功能的。GPIO1_IO00 一共可以复用为 9种功能 IO,分别对应 ALT0~ALT8,其中 ALT5 就是作为 GPIO1_IO00。GPIO1_IO00 还可以作为 I2C2_SCL、GPT1_CAPTURE1、ANATOP_OTG1_ID 等。
而其他的IO口要使用复用功能,也是需要配置相对应的复用寄存器。
2、I.MX6U IO 配置
GPIO_IO00 配置相关的寄存器名为:IOMUXC_SW_PAD_CTL_PAD_GPIO1_IO00,寄
存器地址为 0X020E02E8。
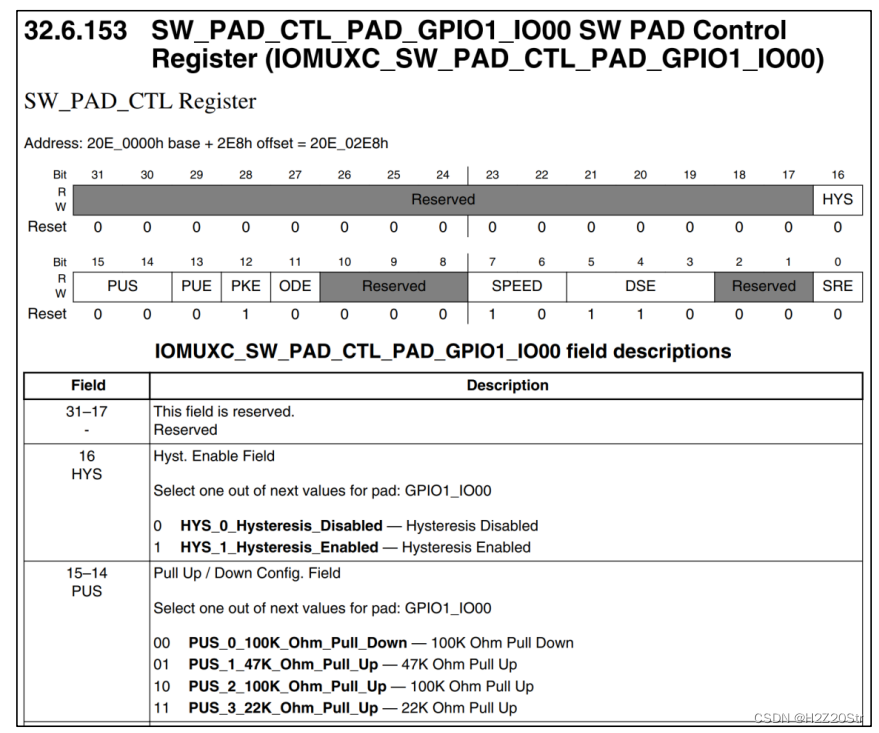
这也是个 32 位寄存器,但是只用到了其中的低 17 位,各位的含义为:

HYS(bit16):对应图 8.1.4.2 中 HYS,用来使能迟滞比较器,当 IO 作为输入功能的时候有效,用于设置输入接收器的施密特触发器是否使能。如果需要对输入波形进行整形的话可以使能此位。此位为 0 的时候禁止迟滞比较器,为 1 的时候使能迟滞比较器。
PUS(bit15:14):对应图 8.1.4.2 中的 PUS,用来设置上下拉电阻的,一共有四种选项可以选
择,如表所示:

PUE(bit13):图 8.1.4.2 没有给出来,当 IO 作为输入的时候,这个位用来设置 IO 使用上下拉还是状态保持器。当为 0 的时候使用状态保持器,当为 1 的时候使用上下拉。状态保持器在IO 作为输入的时候才有用,顾名思义,就是当外部电路断电以后此 IO 口可以保持住以前的状态。
PKE(bit12):对应图 8.1.4.2 中的 PKE,此位用来使能或者禁止上下拉/状态保持器功能,为0 时禁止上下拉/状态保持器,为 1 时使能上下拉和状态保持器。
ODE(bit11):对应图 8.1.4.2 中的 ODE,当 IO 作为输出的时候,此位用来禁止或者使能开路输出,此位为 0 的时候禁止开路输出,当此位为 1 的时候就使能开路输出功能。
SPEED(bit7:6):对应图 8.1.4.2 中的 SPEED,当 IO 用作输出的时候,此位用来设置 IO 速
度,设置如表所示:

DSE(bit5:3):对应图 8.1.4.2 中的 DSE,当 IO 用作输出的时候用来设置 IO 的驱动能力,总共有 8 个可选选项,如表 8.1.4.3 所示:

SRE(bit0):对应图 8.1.4.2 中的 SRE,设置压摆率,当此位为 0 的时候是低压摆率,当为 1的时候是高压摆率。这里的压摆率就是 IO 电平跳变所需要的时间,比如从 0 到 1 需要多少时间,时间越小波形就越陡,说明压摆率越高;反之,时间越多波形就越缓,压摆率就越低。如果你的产品要过 EMC 的话那就可以使用小的压摆率,因为波形缓和,如果你当前所使用的 IO做高速通信的话就可以使用高压摆率。
寄存器 IOMUXC_SW_PAD_CTL_PAD_GPIO1_IO00 是用来配置 GPIO1_IO00 的,包括速度设置、驱动能力设置、压摆率设置等等。
3、I.MX6U GPIO 配置
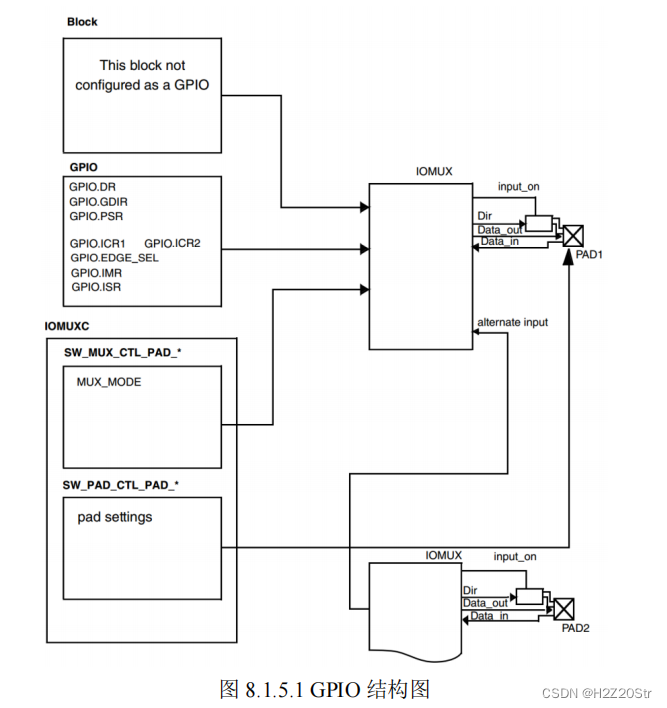
在 图 8.1.5.1 的 左 下 角 的 IOMUXC 框 图 里 面 就 有 SW_MUX_CTL_PAD_* 和SW_PAD_CTL_PAD_*两种寄存器。这两种寄存器前面说了用来设置 IO 的复用功能和 IO 属性配置。左上角部分的 GPIO 框图就是,当 IO 用作 GPIO 的时候需要设置的寄存器,一共有八个:DR、GDIR、PSR、ICR1、ICR2、EDGE_SEL、IMR 和 ISR。前面我们说了 I.MX6U 一共有GPIO1~GPIO5 共五组 GPIO,每组 GPIO 都有这 8 个寄存器。我们来看一下这 8 个寄存器都是什么含义。
DR 寄存器:
此寄存器是数据寄存器,结构图如图 8.1.5.2 所示:
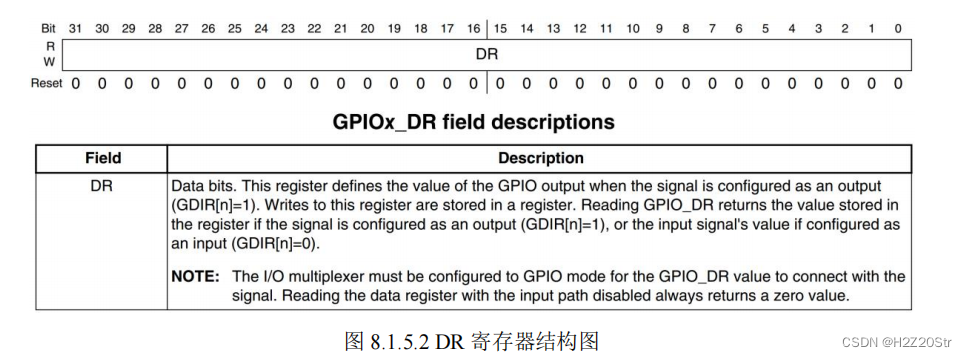
此寄存器是 32 位的,一个 GPIO 组最大只有 32 个 IO,因此 DR 寄存器中的每个位都对应一个 GPIO。当 GPIO 被配置为输出功能以后,向指定的位写入数据那么相应的 IO 就会输出相应的高低电平,比如要设置 GPIO1_IO00 输出高电平,那么就应该设置 GPIO1.DR=1。当 GPIO被配置为输入模式以后,此寄存器就保存着对应 IO 的电平值,每个位对对应一个 GPIO,例如,当 GPIO1_IO00 这个引脚接地的话,那么 GPIO1.DR 的 bit0 就是 0。
GDIR 寄存器
这是方向寄存器,用来设置某个 GPIO 的工作方向的,即输入/输出,GDIR 寄存器结构如图 8.1.5.3 所示:
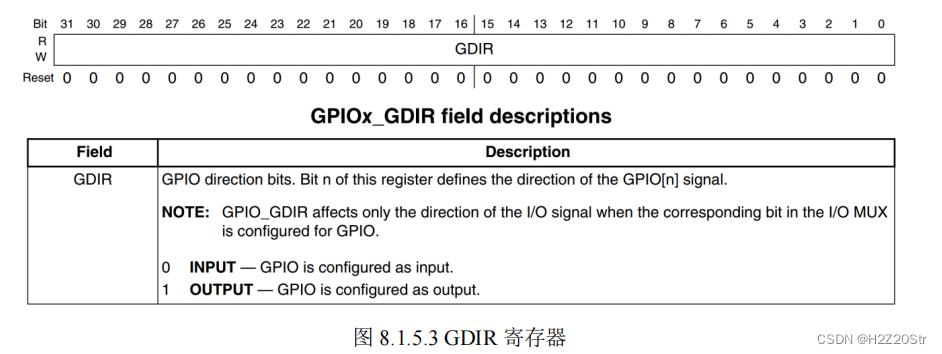
GDIR 寄存器也是 32 位的,此寄存器用来设置某个 IO 的工作方向,是输入还是输出。同样的,每个 IO 对应一个位,如果要设置 GPIO 为输入的话就设置相应的位为 0,如果要设置为输出的话就设置为 1。比如要设置 GPIO1_IO00 为输入,那么 GPIO1.GDIR=0;
PSR 寄存器:
这是 GPIO 状态寄存器,如图 8.1.5.4 所示:
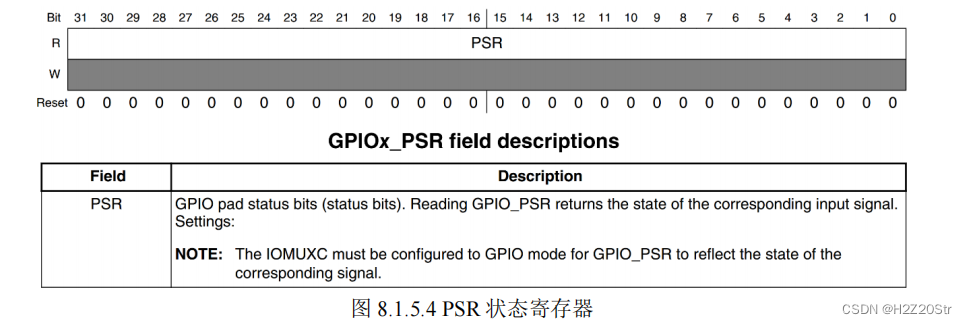
同样的 PSR 寄存器也是一个 GPIO 对应一个位,读取相应的位即可获取对应的 GPIO 的状态,也就是 GPIO 的高低电平值。功能和输入状态下的 DR 寄存器一样。
ICR1和ICR2寄存器:
这两个寄存器,都是中断控制寄存器,ICR1用于配置低16个GPIO,ICR2 用于配置高 16 个 GPIO,ICR1 寄存器如图 8.1.5.5 所示:
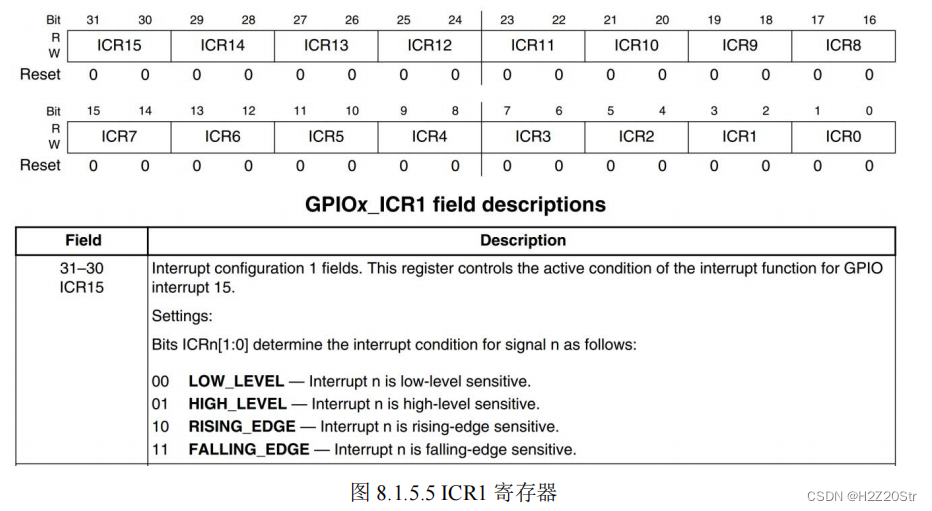
ICR1 用于 IO0~15 的配置, ICR2 用于 IO16~31 的配置。ICR1 寄存器中一个 GPIO 用两个位,这两个位用来配置中断的触发方式,和 STM32 的中断很类似,可配置的选线如表 8.1.5.1所示:
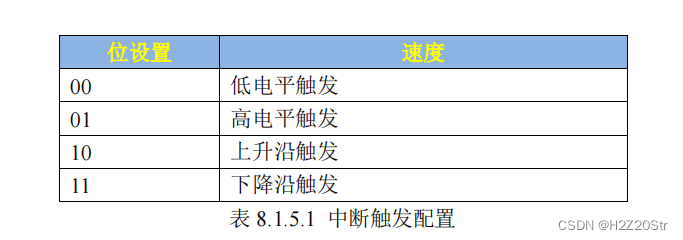
以GPIO1_IO15为例,如果要设置GPIO1_IO15为上升沿触发中断,那么GPIO1.ICR1=2<<30,如果要设置 GPIO1 的 IO16~31 的话就需要设置 ICR2 寄存器了。
IMR 寄存器:
这是中断屏蔽寄存器,如图 8.1.5.6 所示:
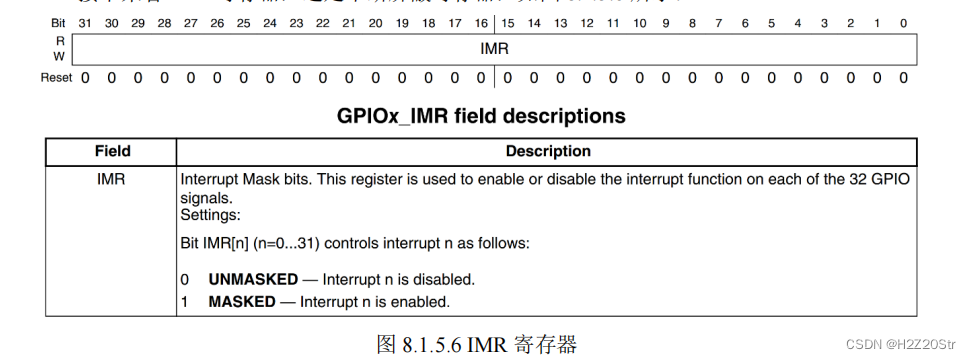
IMR 寄存器也是一个 GPIO 对应一个位,IMR 寄存器用来控制 GPIO 的中断禁止和使能,如果使能某个 GPIO 的中断,那么设置相应的位为 1 即可,反之,如果要禁止中断,那么就设置相应的位为 0 即可。例如,要使能 GPIO1_IO00 的中断,那么就可以设置 GPIO1.MIR=1 即可。
ISR寄存器:
ISR 是中断状态寄存器,寄存器如图 8.1.5.7 所示:
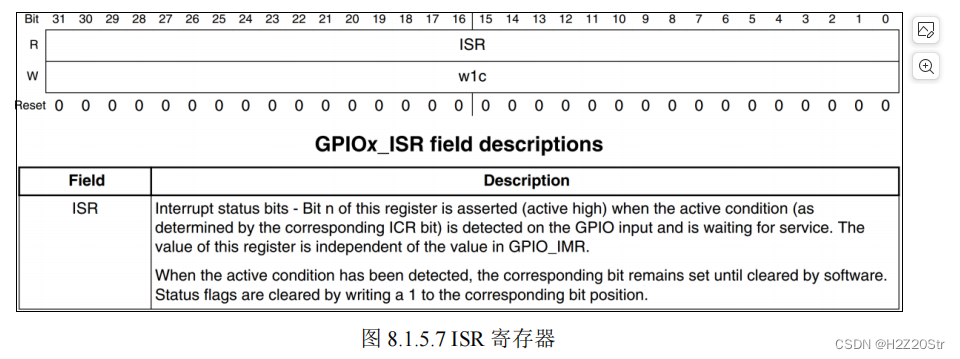
ISR 寄存器也是 32 位寄存器,一个 GPIO 对应一个位,只要某个 GPIO 的中断发生,那么ISR 中相应的位就会被置 1。所以,我们可以通过读取 ISR 寄存器来判断 GPIO 中断是否发生,相当于 ISR 中的这些位就是中断标志位。当我们处理完中断以后,必须清除中断标志位,清除方法就是向 ISR 中相应的位写 1,也就是写 1 清零。
EDGE_SEL 寄存器:
这是边沿选择寄存器,寄存器如图 8.1.5.8 所示:
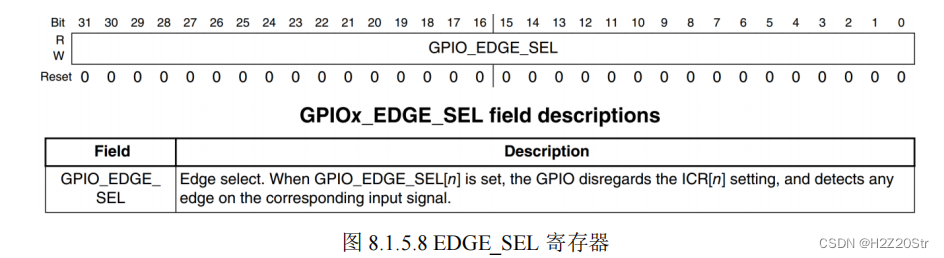
EDGE_SEL 寄存器用来设置边沿中断,这个寄存器会覆盖 ICR1 和 ICR2 的设置,同样是一个 GPIO 对应一个位。如果相应的位被置 1,那么就相当与设置了对应的 GPIO 是上升沿和下降沿(双边沿)触发。例如,我们设置 GPIO1.EDGE_SEL=1,那么就表示 GPIO1_IO01 是双边沿触发中断,无论 GFPIO1_CR1 的设置为多少,都是双边沿触发。
可以看出是 I.MX6U 的 IO 是需要配置和输出的、是可以设置输出高低电平,也可以读取 GPIO 对应的电平。
4、 I.MX6U GPIO 时钟使能
CMM 有CCM_CCGR0~CCM_CCGR6 这 7 个寄存器,这 7 个寄存器控制着 I.MX6U 的所有外设时钟开关,我们以 CCM_CCGR0 为例来看一下如何禁止或使能一个外设的时钟,CCM_CCGR0 结构体如图 8.1.6.1 所示:
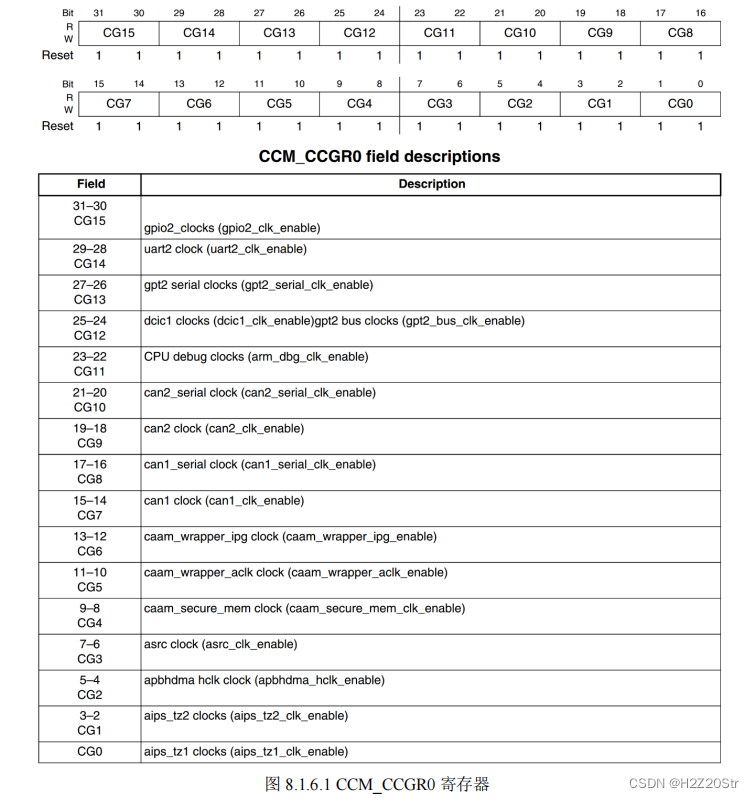
CCM_CCGR0 是个 32 位寄存器,其中每 2 位控制一个外设的时钟,比如 bit31:30 控制着
GPIO2 的外设时钟,两个位就有 4 种操作方式,如表 8.1.6.1 所示:

根据表 8.1.6.1 中的位设置,如果我们要打开 GPIO2 的外设时钟,那么只需要设置CCM_CCGR0 的 bit31 和 bit30 都为 1 即可,也就是 CCM_CCGR0=3 << 30。反之,如果要关闭GPIO2 的 外 设 时 钟 , 那 就 设 置 CCM_CCGR0 的 bit31 和 bit30 都 为 0 即可。
CCM_CCGR0~CCM_CCGR6 这 7 个寄存器操作都是类似的,只是不同的寄存器对应不同的外设时钟而已,为了方便开发,本教程后面所有的例程将 I.MX6U 的所有外设时钟都打开了。至此我们就解决了 8.1.1 中的所有问题都解决了,I.MX6U 的每个外设的时钟都可以独立的禁止和使能,这个和 STM32 是一样。 总结一下,要将 I.MX6U 的 IO 作为 GPIO 使用,我们需要一下几步:
- ①、使能 GPIO 对应的时钟。
- ②、设置寄存器 IOMUXC_SW_MUX_CTL_PAD_XX_XX,设置 IO 的复用功能,使其复用为 GPIO 功能。
- ③、设置寄存器 IOMUXC_SW_PAD_CTL_PAD_XX_XX,设置 IO 的上下拉、速度等等。
- ④、第②步已经将 IO 复用为了 GPIO 功能,所以需要配置 GPIO,设置输入/输出、是否使用中断、默认输出电平等。
三、硬件原理图

可以看出,LED0 接到了 GPIO_3 上,GPIO_3 就是 GPIO1_IO03,当 GPIO1_IO03输出低电平(0)的时候发光二极管 LED0 就会导通点亮,当 GPIO1_IO03 输出高电平(1)的时候发光二极管 LED0 不会导通,因此 LED0 也就不会点亮。所以 LED0 的亮灭取决于 GPIO1_IO03的输出电平,输出 0 就亮,输出 1 就灭。
四、实验程序编写
步骤:
1、使能 GPIO1 时钟
GPIO1 的时钟由 CCM_CCGR1 的 bit27 和 bit26 这两个位控制,将这两个位都设置位 11 即可。本教程所有例程已经将 I.MX6U 的所有外设时钟都已经打开了,因此这一步可以不用做。
2、设置 GPIO1_IO03 的复用功能
找到 GPIO1_IO03 的复用寄存器“IOMUXC_SW_MUX_CTL_PAD_GPIO1_IO03”的地址为0X020E0068,然后设置此寄存器,将 GPIO1_IO03 这个 IO 复用为 GPIO 功能,也就是 ALT5。
3、配置 GPIO1_IO03
找到 GPIO1_IO03 的配置寄存器“IOMUXC_SW_PAD_CTL_PAD_GPIO1_IO03”的地址为0X020E02F4,根据实际使用情况,配置此寄存器。
4、设置 GPIO
我们已经将 GPIO1_IO03 复用为了 GPIO 功能,所以我们需要配置 GPIO。找到 GPIO3 对应的 GPIO 组寄存器地址:
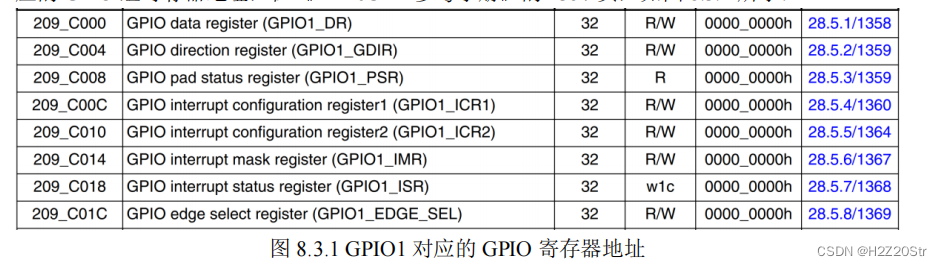
本实验中 GPIO1_IO03 是作为输出功能的,因此 GPIO1_GDIR 的 bit3 要设置为 1,表示输出。
5、控制 GPIO 的输出电平
经过前面几步,GPIO1_IO03 已经配置好了,只需要向 GPIO1_DR 寄存器的 bit3 写入 0 即可控制 GPIO1_IO03 输出低电平,打开 LED,向 bit3 写入 1 可控制 GPIO1_IO03 输出高电平,关闭 LED。
程序编程:
1、先建一个led.s的文件
在 led.s 中输入如下代码:
.global _start /* 全局标号 */
/*
* 描述: _start函数,程序从此函数开始执行此函数完成时钟使能、
* GPIO初始化、最终控制GPIO输出低电平来点亮LED灯。
*/
_start:
/* 例程代码 */
/* 1、使能所有时钟 */
ldr r0, =0X020C4068 /* CCGR0 */
ldr r1, =0XFFFFFFFF /*将寄存器地址 0XFFFFFFFF 加载到 R1 中,即 R1=0XFFFFFFFF*/
str r1, [r0] /*将 R1 中的值写入到 R0 中所保存的地址中*/
ldr r0, =0X020C406C /* CCGR1 */
str r1, [r0]
ldr r0, =0X020C4070 /* CCGR2 */
str r1, [r0]
ldr r0, =0X020C4074 /* CCGR3 */
str r1, [r0]
ldr r0, =0X020C4078 /* CCGR4 */
str r1, [r0]
ldr r0, =0X020C407C /* CCGR5 */
str r1, [r0]
ldr r0, =0X020C4080 /* CCGR6 */
str r1, [r0]
/* 2、设置GPIO1_IO03复用为GPIO1_IO03 */
ldr r0, =0X020E0068 /* 将寄存器SW_MUX_GPIO1_IO03_BASE加载到r0中 IOMUXC_SW_MUX_CTL_PAD_xx*/
ldr r1, =0X5 /* 设置寄存器SW_MUX_GPIO1_IO03_BASE的MUX_MODE为5 */
str r1,[r0]
/* 3、配置GPIO1_IO03的IO属性
*bit 16:0 HYS关闭
*bit [15:14]: 00 默认下拉
*bit [13]: 0 kepper功能
*bit [12]: 1 pull/keeper使能
*bit [11]: 0 关闭开路输出
*bit [7:6]: 10 速度100Mhz
*bit [5:3]: 110 R0/6驱动能力
*bit [0]: 0 低转换率
*/
ldr r0, =0X020E02F4 /*寄存器SW_PAD_GPIO1_IO03_BASE */
ldr r1, =0X10B0
str r1,[r0]
/* 4、设置GPIO1_IO03为输出 */
ldr r0, =0X0209C004 /*寄存器GPIO1_GDIR */
ldr r1, =0X0000008
str r1,[r0]
/* 5、打开LED0
* 设置GPIO1_IO03输出低电平
*/
ldr r0, =0X0209C000 /*寄存器GPIO1_DR */
ldr r1, =0
str r1,[r0]
/*
* 描述: loop死循环
*/
loop:
b loop 五、编译程序
1、arm-linux-gnueabihf-gcc 编译文件
要编译出在 ARM 开发板上运行的可执行文件,要使用交叉编译器 arm-linux-gnueabihf-gcc 来编译。因为本试验就一个 led.s 源文件,所以编译比较简单。先将 led.s 编译为对应的.o 文件,在终端中输入如下命令:
arm-linux-gnueabihf-gcc -g -c led.s -o led.o
上述命令就是将 led.s 编译为 led.o,其中“-g”选项是产生调试信息,GDB 能够使用这些调试信息进行代码调试。“-c”选项是编译源文件,但是不链接。“-o”选项是指定编译产生的文件名字,这里我们指定 led.s 编译完成以后的文件名字为 led.o。执行上述命令以后就会编译生成一个 led.o 文件,如图所示:
2、arm-linux-gnueabihf-ld 链接文件
arm-linux-gnueabihf-ld 用来将众多的.o 文件链接到一个指定的链接位置。就是单片机是可以指定在某一个地址开始执行,而这个链接步骤就是将我们要执行的程序,链接到指定的地址开始执行。
由于裸机例程都是烧写到 SD 卡中,所以本学习笔记中的所有裸机例程的链接地址都在 DDR中,链接起始地址为 0X87800000。
确定了链接地址以后就可以使用 arm-linux-gnueabihf-ld 来将前面编译出来的 led.o 文件链接到 0X87800000 这个地址,使用如下命令:
arm-linux-gnueabihf-ld -Ttext 0X87800000 led.o -o led.elf上述命令中-Ttext 就是指定链接地址,“-o”选项指定链接生成的 elf 文件名,这里我们命名为 led.elf。上述命令执行完以后就会在工程目录下多一个 led.elf 文件,如图所示:

led.elf 文件也不是我们最终烧写到 SD 卡中的可执行文件,我们要烧写的.bin 文件,因此还需要将 led.elf 文件转换为.bin 文件,这里我们就需要用到 arm-linux-gnueabihf-objcopy 这个工具了。
3、arm-linux-gnueabihf-objcopy 格式转换
arm-linux-gnueabihf-objcopy 更像一个格式转换工具,我们需要用它将 led.elf 文件转换为led.bin 文件,命令如下:
arm-linux-gnueabihf-objcopy -O binary -S -g led.elf led.bin上述命令中,“-O”选项指定以什么格式输出,后面的“binary”表示以二进制格式输出,选项“-S”表示不要复制源文件中的重定位信息和符号信息,“-g”表示不复制源文件中的调试信息。上述命令执行完成以后,工程目录如图所示:

至此得到led.bin 文件,此文件即可写入SD卡上让班子运行
4、arm-linux-gnueabihf-objdump 反汇编
大多数情况下我们都是用 C 语言写试验例程的,有时候需要查看其汇编代码来调试代码,因此就需要进行反汇编,一般可以将 elf 文件反汇编,比如如下命令:
arm-linux-gnueabihf-objdump -D led.elf > led.dis上述代码中的“-D”选项表示反汇编所有的段,反汇编完成以后就会在当前目录下出现一
个名为 led.dis 文件,如图所示:

可以打开 led.dis 文件看一下,看看是不是汇编代码,如图所示:

从图 8.4.1.9 可以看出 led.dis 里面是汇编代码,而且还可以看到内存分配情况。在0X87800000 处就是全局标号_start,也就是程序开始的地方。通过 led.dis 这个反汇编文件可以明显的看出我们的代码已经链接到了以 0X87800000 为起始地址的区域。
为了方便以上的编译步骤,可将上述4个步骤写入makefile文件中
创建 Makefile 文件:
led.bin:led.s
arm-linux-gnueabihf-gcc -g -c led.s -o led.o
arm-linux-gnueabihf-ld -Ttext 0X87800000 led.o -o led.elf
arm-linux-gnueabihf-objcopy -O binary -S -g led.elf led.bin
arm-linux-gnueabihf-objdump -D led.elf > led.dis
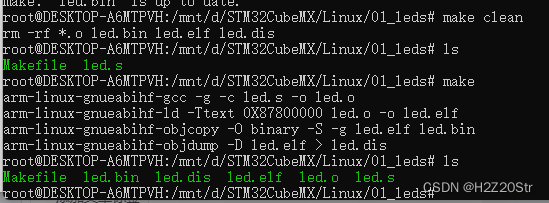
clean:
rm -rf *.o led.bin led.elf led.dis创建好 Makefile 以后我们就只需要执行一次“make”命令即可完成编译,过程如图所示:
六、将程序写入SD卡中
由于在WLS中无法识别SD卡,也就无法写入SD了,还没开始就结束了。。。
七、程序例程
【免费】Linux学习笔记4-点亮LED灯(汇编裸机)程序资源-CSDN文库