接上回:学习记录:AUTOSAR R20-11的阅读记录(二)【AP】
五、CP
在AUTOSAR_TR_ClassicPlatformReleaseOverview.pdf里面对CP文档进行分类:
- Release Documentation
- Communication
- Memory
- System Services
- MCAL
- IO
- Libraries
- Diagnostics
- Safety
- BSW General
- General
- Methodology and Templates
- Mode Management
- RTE
- Application Interfaces
- Crypto
- Global Time
- SWArch
- Security
下面对整个文档浏览下:
1、Release Documentation(2个)
| 5.1 | File Name | 说明 |
| 1 | AUTOSAR_TR_ClassicPlatformReleaseOverview.pdf | CP文档总的概述 |
| 2 | AUTOSAR_TR_ClassicPlatformSpecificationHashes.sha256 | Sha256文件 |
2、Communication(69个)
【内容太多了,只有前面21个文档记录,后面48个记录遗失了,待++】
| 5.2 | File Name | 说明 |
| 1 | AUTOSAR_ASWS_ TransformerGeneral.pdf | 1.需求索引,前缀: •”SRS_BSW_*” –> ”SWS_Xfrm_*” •”SRS_Xfrm_*” –> ”SWS_Xfrm_*” 2.Transformer使AUTOSAR系统能够使用数据转换机制来线性化和转换数据。Transformer是通信服务集群中的BSW模块,为RTE提供通信服务,用于ECU内部和ECU之间的通信。参考(图2-1:ECU间通信的Transformer示例) 3.详细api,索引到SWS_Xfrm_* |
| 2 | AUTOSAR_SRS_SAEJ1939.pdf | 1.需求索引,前缀: ”RS_BRF_*” –> ”SRS_J1939_*” 2.本文件规定了以下BSW模块的需求: • SAE J1939传输层模块(J1939Tp) • SAE J1939请求管理器(J1939Rm) • SAE J1939网络管理模块(J1939Nm) 参考(图2-2:J1939在AUTOSAR架构中的位置) |
| 3 | AUTOSAR_SRS_BusMirroring.pdf | 1.需求索引,前缀: ”RS_Main_*” –> ”SRS_Mirror_*” 2.本文档规定了总线镜像模块的需求。 测试人员无法直接访问车辆中的许多通信总线。总线镜像的目的是使测试人员能够监听此类内部通信总线上的通信量 |
| 4 | AUTOSAR_SRS_CAN.pdf | 1.需求索引,前缀: ”RS_BRF_*” –> ”SRS_Can_*” 2. 本文件规定了以下基本软件模块的需求: • CAN驱动器(CAN) • CAN接口(CanIf) • CAN状态管理器(CanSM) • CAN传输层(CanTp) • CAN总线收发器驱动器(CanTrcv) |
| 5 | AUTOSAR_SRS_COM.pdf | 1.需求索引,前缀: ”RS_BRF_*” –> ”SRS_Com_*” 2.以下规范旨在定义AUTOSAR COM和LargeDataCOM模块的功能和非功能需求。AUTOSAR COM和LargeDataCom位于RTE和PDU路由器之间 3.AUTOSAR COM的主要功能 4.AUTOSAR LargeDataCOM的主要功能 |
| 6 | AUTOSAR_SRS_Ethernet.pdf | 1.需求索引,前缀: ”RS_BRF_*” –> ”SRS_Eth_*” 2.本文档旨在列出UID 387 TCP/IP CommStack扩展(TCP/IP)概念产生的一般需求 |
| 7 | AUTOSAR_SRS_FlexRay.pdf | 1.需求索引,前缀: ”RS_BRF_*” –> ”SRS_Fr_*” 2.FlexRay需求。功能概述如下: • 通用要求(FlexRay接口和FlexRay驱动程序) • FlexRay接口 • FlexRay驱动程序 • 传输层FlexRay • FlexRay计时服务 • FlexRay收发器驱动程序 |
| 8 | AUTOSAR_SRS_Gateway.pdf | 1.需求索引,前缀: ”RS_BRF_*” –> ”SRS_GTW_*” 2. AUTOSAR网关功能由两部分组成: •PDU级的网关功能(基于PDU的网关),由PDU路由器模块提供 •信号级网关功能(基于信号的网关),由作为COM组成部分的信号网关提供。 |
| 9 | AUTOSAR_SRS_IPDUMultiplexer.pdf | 1.需求索引,前缀: ”RS_BRF_*” –> ”SRS_IpduM_*” 2. 本文件的目标是定义AUTOSAR I-PDU-Multiplexer模块(IPduM)的需求,参考(图2-3:IPduM的放置) |
| 10 | AUTOSAR_SRS_LIN.pdf | 1.需求索引,前缀: ”RS_BRF_*” –> ”SRS_Lin_*” 2. 本文件规定了以下基本软件模块的需求: • LIN驱动器(LIN) • LIN收发器驱动器(LinTrcv) • LIN接口(LinIf) • LIN传输层(LinTp) |
| 11 | AUTOSAR_SRS_XCP.pdf | 1.需求索引,前缀: ”RS_BRF_*” –> ”SRS_Xcp_*” 2.XCP是用于ECU校准的ASAM标准。介绍此协议功能 |
| 12 | AUTOSAR_SRS_ NetworkManagement.pdf | 1.需求索引,前缀: ”RS_BRF_*” –> ”SRS_Nm_*” 2.本文件定义AUTOSAR网络管理的需求。涵盖以下功能实体的要求: • 网络管理协调特定NM集群。 • 特定总线的网络管理总线细节。 • NM集群之间网络管理的网关和互操作性。 NM适用的通信系统必须支持“总线休眠”模式。这意味着通信系统的收发器可以切换到低功率模式,并且可以通过(特定的)总线业务和/或应用再次切换到全功率模式 |
| 13 | AUTOSAR_SRS_ SecureOnboardCommunication.pdf | 1.需求索引,前缀: ”RS_BRF_*” –> ”SRS_SecOC_*” 2.安全车载通信(SecOC)模块的目的是提供一个AUTOSAR BSW模块,以在两个或多个通过汽车嵌入式网络交换信息的对等体之间传输安全数据。本文件列出了适用于AUTOSAR SecOC模块设计的需求。 |
| 14 | AUTOSAR_SRS_SPIHandlerDriver.pdf | 1.需求索引,前缀: ”RS_BRF_*” –> ”SRS_Spi_*” 2.本文件规定了单片SPI处理器/驱动器模块的需求: • SPI Handler/Driver, common functionality • Asynchronous SPI functionality • Synchronous SPI functionality |
| 15 | AUTOSAR_SRS_Transformer.pdf | 1.需求索引,前缀: ”RS_BRF_*” –> ”SRS_Xfrm_*” 2.本文件定义一套适用于AUTOSAR中所有Transformer的通用基本需求: • General Requirements on Transformers • SOME/IP Transformer Requirements • COM Based Transformer Requirements |
| 16 | AUTOSAR_SRS_TTCAN.pdf | 1.需求索引,前缀: ”RS_BRF_*” –> ”SRS_TtCan_*” 2. 本文件规定了CAN BSW堆栈的附加TTCAN需求 |
| 17 | AUTOSAR_SRS_ V2XCommunication.pdf | 1.需求索引,前缀: ”RS_Main_*” –> ”SRS_V2X_*” 2. 本文件规定了Vehicle-2-X通信的需求 |
| 18 | AUTOSAR_SWS_ SAEJ1939RequestManager.pdf | 1.需求索引,前缀: •”SRS_BSW_00407” –> ”SWS_J1939Rm_00039” •”SRS_J1939_*” –> ”SWS_J1939Rm_*” 2.本规范规定了AUTOSAR基本软件模块J1939请求管理器的功能、API和配置。文件结构: •第7章定义J1939请求管理器的行为。 •第8章定义模块的API •第10章定义配置 3.详细api,索引到SWS_J1939Rm_* |
| 19 | AUTOSAR_SWS_ SAEJ1939TransportLayer.pdf | 1.需求索引,前缀: •”SRS_BSW_*” –> ”SWS_J1939Tp_*” •”SRS_J1939_*” –> ”SWS_J1939Tp_*” 2. 本规范描述了AUTOSAR基本软件模块J1939Tp的功能、API和配置。该模块为AUTOSAR实现SAE J1939兼容传输层 3.详细api,索引到SWS_J1939Tp_* |
| 20 | AUTOSAR_SWS_BusMirroring.pdf | 1.需求索引,前缀: •”SRS_BSW_*” –> ”SWS_Mirror_*” •”SRS_Mirror_*” –> ”SWS_Mirror_*” 2. 本规范描述了AUTOSAR基本软件模块总线镜像的功能、API和配置。 总线镜像模块的目的是将内部总线的流量和状态复制到外部总线,以便连接到该外部总线的测试仪可以监视内部总线以进行调试 3.详细api,索引到SWS_Mirror_* |
| 21 | AUTOSAR_SWS_CANDriver.pdf | 1.需求索引,前缀: •”SRS_BSW_*” –> ”SWS_Can_*” •”SRS_Can_*” –> ”SWS_Can_*” •”SRS_SPAL_*” –> ”SWS_Can_*” 2. 本规范规定了AUTOSAR基本软件模块CAN驱动程序(本文档中称为“CAN模块”)的功能、API和配置。 Can模块是最低层的一部分,执行硬件访问,并向上层提供独立于硬件的API 3.详细api,索引到SWS_Can_* |
| 22 | AUTOSAR_SWS_CANInterface.pdf | 待++ |
| 23 | AUTOSAR_SWS_ CANNetworkManagement.pdf | 待++ |
| 24 | AUTOSAR_SWS_ CANStateManager.pdf | 待++ |
| 25 | AUTOSAR_SWS_ CANTransceiverDriver.pdf | 待++ |
| 26 | AUTOSAR_SWS_ CANTransportLayer.pdf | 待++ |
| 27 | AUTOSAR_SWS_ COMBasedTransformer.pdf | 待++ |
| 28 | AUTOSAR_SWS_COM.pdf | 待++ |
| 29 | AUTOSAR_SWS_ DiagnosticLogAndTrace.pdf | 待++ |
| 30 | AUTOSAR_SWS_DiagnosticOverIP.pdf | 待++ |
| 31 | AUTOSAR_SWS_EthernetDriver.pdf | 待++ |
| 32 | AUTOSAR_SWS_EthernetInterface.pdf | 待++ |
| 33 | AUTOSAR_SWS_ EthernetStateManager.pdf | 待++ |
| 34 | AUTOSAR_SWS_ EthernetSwitchDriver.pdf | 待++ |
| 35 | AUTOSAR_SWS_ EthernetTransceiverDriver.pdf | 待++ |
| 36 | AUTOSAR_SWS_ FlexRayARTransportLayer.pdf | 待++ |
| 37 | AUTOSAR_SWS_FlexRayDriver.pdf | 待++ |
| 38 | AUTOSAR_SWS_FlexRayInterface.pdf | 待++ |
| 39 | AUTOSAR_SWS_ FlexRayISOTransportLayer.pdf | 待++ |
| 40 | AUTOSAR_SWS_ FlexRayNetworkManagement.pdf | 待++ |
| 41 | AUTOSAR_SWS_ FlexRayStateManager.pdf | 待++ |
| 42 | AUTOSAR_SWS_ FlexRayTransceiverDriver.pdf | 待++ |
| 43 | AUTOSAR_SWS_IPDUMultiplexer.pdf | 待++ |
| 44 | AUTOSAR_SWS_LargeDataCOM.pdf | 待++ |
| 45 | AUTOSAR_SWS_LINDriver.pdf | 待++ |
| 46 | AUTOSAR_SWS_LINInterface.pdf | 待++ |
| 47 | AUTOSAR_SWS_LINStateManager.pdf | 待++ |
| 48 | AUTOSAR_SWS_ LINTransceiverDriver.pdf | 待++ |
| 49 | AUTOSAR_SWS_E2ETransformer.pdf | 待++ |
| 50 | AUTOSAR_SWS_XCP.pdf | 待++ |
| 51 | AUTOSAR_SWS_ SAEJ1939NetworkManagement.pdf | 待++ |
| 52 | AUTOSAR_SWS_ NetworkManagementInterface.pdf | 待++ |
| 53 | AUTOSAR_SWS_PDURouter.pdf | 待++ |
| 54 | AUTOSAR_SWS_ SecureOnboardCommunication.pdf | 待++ |
| 55 | AUTOSAR_SWS_ServiceDiscovery.pdf | 待++ |
| 56 | AUTOSAR_SWS_SocketAdaptor.pdf | 待++ |
| 57 | AUTOSAR_SWS_ SOMEIPTransformer.pdf | 待++ |
| 58 | AUTOSAR_SWS_SPIHandlerDriver.pdf | 待++ |
| 59 | AUTOSAR_SWS_TcpIp.pdf | 待++ |
| 60 | AUTOSAR_SWS_TTCANDriver.pdf | 待++ |
| 61 | AUTOSAR_SWS_TTCANInterface.pdf | 待++ |
| 62 | AUTOSAR_SWS_ UDPNetworkManagement.pdf | 待++ |
| 63 | AUTOSAR_SWS_ V2XBasicTransport.pdf | 待++ |
| 64 | AUTOSAR_SWS_V2XFacilities.pdf | 待++ |
| 65 | AUTOSAR_SWS_ V2XGeoNetworking.pdf | 待++ |
| 66 | AUTOSAR_SWS_V2XManagement.pdf | 待++ |
| 67 | AUTOSAR_SWS_ WirelessEthernetDriver.pdf | 待++ |
| 68 | AUTOSAR_SWS_ WirelessEthernetTransceiverDriver.pdf | 待++ |
| 69 | AUTOSAR_SWS_ SOMEIPTransportProtocol.pdf | 待++ |
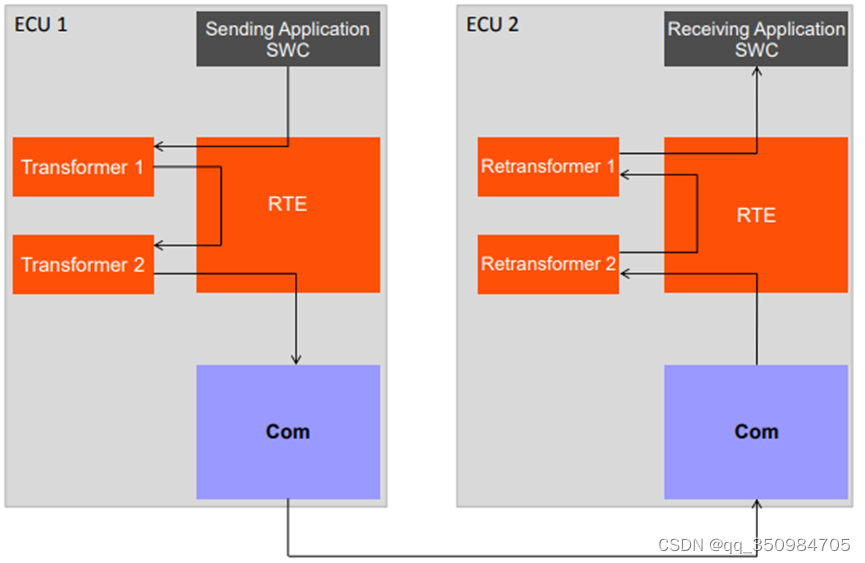
图2-1:ECU间通信的Transformer示例

图2-2:J1939在AUTOSAR架构中的位置
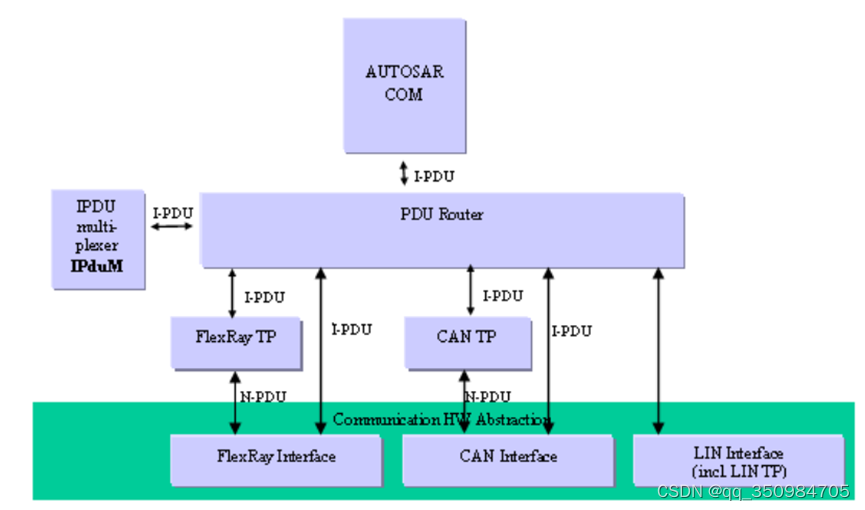
图2-3:IPduM的放置
3、Memory(18个)
| 5.3 | File Name | 说明 |
| 1 | AUTOSAR_EXP_ FirmwareOverTheAir.pdf | 1.FOTA方法应引入通用机制,以在运行时更新ECU软件。安装时,应验证新软件的真实性和完整性,该安装可在几个行驶周期内中断和继续。如果验证结果为肯定,ECU应能够激活新的SW。如果在激活新SW之后或期间检测到异常或错误,ECU应能够实现ECU内部回滚到先前的SW 2. 由于FOTA方法应适用于AUTOSAR的经典和自适应平台,因此决定将FOTA Master实现放在自适应平台中,因为自适应ECU预计比经典ECU更强大,参考下面图3-1 |
| 2 | AUTOSAR_EXP_ NVDataHandling.pdf | 1.本文档介绍了非易失性存储器的基本AUTOSAR概念以及应用软件组件可用的各种访问机制。 •第4章简要概述了非易失性存储器的概念, •第5章提供了从应用程序(最终用户)访问非易失存储器的各种用例 |
| 3 | AUTOSAR_SRS_ EEPROMDriver.pdf | 1.需求索引,前缀: ”RS_BRF_*” –> ”SRS_Eep_*” 2. 本文件规定了模块EEPROM驱动程序的需求,功能: •内部EEPROM驱动程序提供初始化和读取、写入、擦除内部EEPROM的服务。 •外部EEPROM驱动程序提供初始化和外部EEPROM的读取、写入和擦除服务 |
| 4 | AUTOSAR_RS_ FirmwareOverTheAir.pdf | 1.需求索引,前缀:”RS_FOTA_*” 2.本文件规定了作为CDD实现的AUTOSAR FOTA(空中固件)目标模块的需求,分为: •Functional Requirements 1)Requirements on FOTA Target ECUs 2)Requirements on FOTA Handler (CDD) 3)Memory Stack Requirements 4)Requirements on FOTA system •Non-Functional Requirements (Qualities) |
| 5 | AUTOSAR_SRS_FlashDriver.pdf | 1.需求索引,前缀: •”BS_BRF_*” –> ”SRS_Fls_*” •”RS_BRF_*” –> ”SRS_Fls_*” 2. 本文件规定了Flash驱动程序模块的需求,功能: •内部闪存驱动器 内部闪存驱动程序提供初始化和读取、写入、擦除内部闪存的服务。Flash驱动程序提供内置加载器功能,允许将闪存访问代码加载到RAM,并在需要时从那里执行写入/擦除操作。 •外部闪存驱动器 外部闪存驱动程序提供初始化和读取、写入、擦除外部闪存的服务。它具有与内部闪存驱动器相同的功能范围 |
| 6 | AUTOSAR_SRS_FlashTest.pdf | 1.需求索引,前缀: •”RS_BRF_*” –> ”SRS_FlsTst_*” 2. 本文件规定了模块闪存测试的需求。该软件模块提供了测试恒定存储器的算法。固定存储器可以是数据/程序闪存、程序SRAM、锁定高速缓存,并且嵌入微控制器或映射到微控制器的存储器中。为了简化,软件模块称为闪存测试驱动程序。 3.测试服务可以在MCU初始化后的任何时间执行,Flash测试驱动程序的用户可以选择合适的测试算法和正确的执行位置,以满足系统的安全要求。测试服务本身取决于系统的存储概念。因此,不同测试算法的可用性是可配置的 |
| 7 | AUTOSAR_SRS_ MemoryHWAbstractionLayer.pdf | 1.需求索引,前缀: •”RS_BRF_*” –> ”SRS_MemHwAb_*” 2. 本文件规定了组成内存硬件抽象层(MemHwA)的模块的需求,功能分为: •EEPROM抽象层 EEPROM抽象层(EA)应扩展EEPROM驱动器,以便为上层提供线性地址空间上的虚拟分段和“几乎无限”的擦除/写入周期。除此之外,它还应提供与EEPROM驱动器相同的功能。 •闪存EEPROM仿真 闪存EEPROM仿真(FEE)应模拟闪存技术上EEPROM抽象层的行为。因此,它应具有与EEPROM抽象层相同的功能范围和API,并允许基于底层闪存驱动器和闪存设备的类似配置。 •内存抽象接口 内存抽象接口(MemIf)应从底层FEE或EA模块的数量中抽象出来,并在统一的线性地址空间上为上层提供虚拟分段 |
| 8 | AUTOSAR_SRS_ MemoryServices.pdf | 1.需求索引,前缀: •”RS_BRF_*” –> ”SRS_Mem_*” 2. 本文件规定了以下软件层的基本软件模块需求: •服务层 这些模块的类型如下: •NVRAM管理 •接口 模块的选择来源于基本软件模块列表和AUTOSAR分层软件架构。范围内包括以下模块: •NVRAM管理器 •批量NvData管理器 3.功能描述: 非易失性RAM管理器(NVRAM管理器)管理各种非易失存储器中的数据存储。 NVRAM管理器本身应独立于硬件,所有直接访问硬件的功能,例如内部或外部EEPROM、内部或外部闪存中的模拟EEPROM等,都封装在基本软件的较低层中。NVRAM管理器处理对非易失性数据的并发访问,并为单个数据元素提供校验和保护等可靠性机制 |
| 9 | AUTOSAR_SRS_RAMTest.pdf | 1.需求索引,前缀: •”RS_BRF_*” –> ”SRS_RamTst_*” 2. 本文件规定了模块RAM测试的需求。仅涵盖检查RAM的软件算法要求。硬件RAM检查(如ECC检查)不在本文档的范围内 |
| 10 | AUTOSAR_SWS_ EEPROMAbstraction.pdf | 1.需求索引,前缀: •”RS_BRF_*” –> ”SWS_Ea_*” •”SRS_BSW_*” –> ”SWS_Ea_*” •”SRS_MemHwAb_*” –> ”SWS_Ea_*” •”SRS_SPAL_*” –> ”SWS_Ea_*” 2. 本规范描述了EEPROM抽象层的功能、API和配置。EEPROM抽象(EA)从设备特定寻址方案和分段中抽象出来,并为上层提供虚拟寻址方案和分割,以及“实际上”无限数量的擦除周期 3.详细api,索引到SWS_Ea_* |
| 11 | AUTOSAR_SWS_ EEPROMDriver.pdf | 1.需求索引,前缀: •”SRS_BSW_*” –> ”SWS_Eep_*” •”SRS_Eep_*” –> ”SWS_Eep_*” •”SRS_SPAL_*” –> ”SWS_Eep_*” 2. 本规范描述EEPROM驱动程序的功能和API。本规范适用于内部和外部EEPROM的驱动程序。 内部EEPROM的驱动器直接访问微控制器硬件,并位于微控制器抽象层中。外部EEPROM的驱动程序使用处理器(大多数情况下为SPI)或驱动程序访问外部EEPROM设备。它位于ECU抽象层 3.详细api,索引到SWS_Eep_* |
| 12 | AUTOSAR_SWS_FlashDriver.pdf | 1.需求索引,前缀: •”RS_BRF_*” –> ”SWS_Fls_*” •”SRS_BSW_*” –> ”SWS_Fls_*” •”SRS_Fls_*” –> ”SWS_Fls_*” •”SRS_SPAL_*” –> ”SWS_Fls_*” 2. 本文档规定了AUTOSAR基本软件模块Flash驱动程序的功能、API和配置。 本规范适用于内部和外部闪存的驱动程序 3.详细api,索引到SWS_Fls_* |
| 13 | AUTOSAR_SWS_ FlashEEPROMEmulation.pdf | 1.需求索引,前缀: •”RS_BRF_*” –> ”SWS_Fee_*” •”SRS_BSW_*” –> ”SWS_Fee_*” •”SRS_MemHwAb_*” –> ”SWS_Fee_*” •”SRS_SPAL_*” –> ”SWS_Fee_*” 2. 本规范描述了闪存EEPROM仿真模块的功能、API和配置。FEE应从设备特定寻址方案和分段中抽象出来,并为上层提供虚拟寻址方案和分区以及“虚拟”无限数量的擦除周期 3.详细api,索引到SWS_Fee_* |
| 14 | AUTOSAR_SWS_FlashTest.pdf | 1.需求索引,前缀: •”SRS_BSW_*” –> ”SWS_FlsTst_*” •”SRS_FlsTst _*” –> ”SWS_FlsTst _*” •”SRS_SPAL_*” –> ”SWS_FlsTst _*” 2. 本规范规定了AUTOSAR基本软件模块闪存测试驱动程序的功能、API和配置。 该Flash测试模块提供了测试恒定内存的算法。固定存储器可以是数据/程序闪存、程序SRAM、锁定高速缓存,并且嵌入微控制器或映射到微控制器的存储器中。为了简化,软件模块称为闪存测试驱动程序。 测试服务可以在MCU初始化后的任何时间执行,Flash测试驱动程序的用户可以选择合适的测试算法和正确的执行位置,以满足系统的安全要求。 3.详细api,索引到SWS_FlsTst_* |
| 15 | AUTOSAR_SWS_ MemoryAbstractionInterface.pdf | 1.需求索引,前缀: •”RS_BRF_*” –> ”SWS_MemIf_*” •”SRS_BSW_*” –> ”SWS_MemIf_*” •”SRS_MemHwAb _*” –> ”SWS_MemIf _*” •”SRS_SPAL_*” –> ”SWS_MemIf _*” 2. 本规范描述了AUTOSAR基本软件模块“内存抽象接口”(MemIf)的功能、API和配置。该模块允许NVRAM管理器访问多个内存抽象模块(FEE或EA模块) 内存抽象接口(MemIf)应从底层FEE或EA模块的数量中抽象出来,并在统一的线性地址空间上为上层提供虚拟分段 3.详细api,索引到SWS_MemIf_* |
| 16 | AUTOSAR_SWS_ MemoryMapping.pdf | 1.需求索引,前缀: •”SRS_BSW_*” –> ”SWS_MemMap_*” 2. 本文档规定了通过内存映射文件将代码和数据映射到特定内存段的机制。对于许多ECU和微控制器平台来说,能够将代码、变量和常量模块化地映射到特定的存储器部分是极为必要的。重要用例的选择: •避免RAM浪费 •特定RAM属性的使用 •特定ROM属性的使用 •引导加载程序和应用程序使用相同的模块源代码 •支持内存保护 •分区支持 |
| 17 | AUTOSAR_SWS_ NVRAMManager.pdf | 1.需求索引,前缀: •”SRS_BSW_*” –> ”SWS_NvM_*” •”SRS_LIBS_*” –> ”SWS_NvM_*” •”SRS_Mem_*” –> ”SWS_NvM_*” •”SWS_BSW_00047” –> ”SWS_NvM_00447” •”SWS_NvM_08541” –> ”SWS_NvM_00897” 2. 本规范描述了AUTOSAR基本软件模块NVRAM管理器(NvM)的功能、API和配置。 NvM模块应提供服务,以确保NV(非易失性)数据在汽车环境中的数据存储和维护。NvM模块应能够管理EEPROM和/或FLASH EEPROM仿真设备的NV数据。 NvM模块应为NV数据的管理和维护(初始化/读取/写入/控制)提供所需的同步/异步服务。 3.详细api,索引到SWS_NvM_* |
| 18 | AUTOSAR_SWS_RAMTest.pdf | 1.需求索引,前缀: •”SRS_BSW_*” –> ”SWS_RamTst_*” •”SRS_RamTst_*” –> ”SWS_RamTst_*” •”SRS_SPAL_*” –> ”SWS_RamTst _*” 2. 本文件规定了AUTOSAR基本软件模块“RAM测试”的功能、API和配置。 测试环境可以选择测试参数,启动和停止测试,并获取状态报告。开发错误报告给默认错误跟踪器(DET),生产错误报告给诊断事件管理器(DEM) RamTst模块由用于后台测试的RamTst_MainFunction()、用于前台测试的API、几个配置和状态API(应用程序编程接口)以及几个配置容器组成 3.详细api,索引到SWS_RamTst_* |
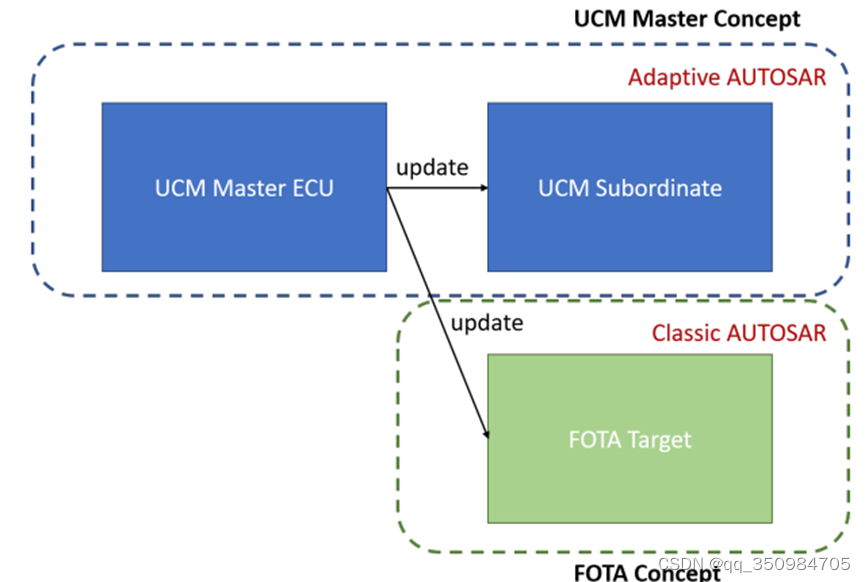
图3-1 FOTA
4、System Services(15个)
| 5.4 | File Name | 说明 |
| 1 | AUTOSAR_EXP_ CPSwClusterDesignAndIntegration Guideline.pdf | CP软件集群设计和集成指南说明,本文件的目标是: •概述软件集群的技术方法 •解释CP平台中软件集群的使用 •列出设计和功能限制 •提供一些示例 |
| 2 | AUTOSAR_SRS_ FreeRunningTimer.pdf | 1.需求索引,前缀: ”RS_BRF_*” –> ”SRS_Frt_*” 2. 本文档定义了Software Free Running Timer(SWFRT)功能的需求。SWFRT模块提供一段代码,用于访问一个或多个硬件计时器。运行时,任何其他软件模块不得修改此硬件计时器。具体需求分为: •Functional Requirements: 1)Configuration (模块的哪些元素需要配置) 2)Initialization 3)Normal Operation 4)Shutdown Operation 5)Fault Operation •Non-Functional Requirements: 1)Timing Requirements 2)Resource Usage 3)Usability 4)Output for other WPs (例如描述模板、工具等) |
| 3 | AUTOSAR_SRS_ FunctionInhibitionManager.pdf | 1.需求索引,前缀: ”RS_BRF_*” –> ”SRS_Fim_*” 2. 本文件旨在定义Function Inhibition Manager(FIT)功能需求。重点是FIT的范围,以及与AUTOSAR中的其他控制机制(如RTE)的区别,以及其中的要素必须在多大程度上可配置,以及它们应遵守哪些初步要求以满足定制需求 3. FIT负责为软件组件及其功能提供控制机制。在这种情况下,功能可以由一个、多个或部分可运行实体的内容组成,这些实体具有相同的一组许可/禁止条件。 通过FIM,可以通过校准配置甚至修改这些功能的抑制 |
| 4 | AUTOSAR_SRS_ HWTestManager.pdf | 1.需求索引,前缀: ”FS_HTMSS_00001” –> ”SRS_ HTMSS _*” 2. 本文件列出HTMSS(硬件测试管理器启动和关闭)模块设计的需求。该模块的基本功能包括从MSTP收集测试结果/状态、配置MSTP测试、启动测试执行、向EcuM模块和应用程序SWC提供MSTP测试状态以评估系统行为的测试结果 3. HTMSS模块预集成要求如下: •应可以在开发中的设备上运行微控制器特定测试包(MSTP)启动和关闭测试 •测试结果/状态可供HTMSS模块访问 •应可以通过HTMSS模块配置MSTP启动和关闭测试 |
| 5 | AUTOSAR_SRS_OS.pdf | 1.需求索引,前缀: ”RS_BRF_*” –> ”SRS_Os_*” 2. 本文档的目标是定义AUTOSAR操作系统的高级需求: • Real-Time Operating System • Statically Defined Scheduling • Monitoring Facilities • Protection Facilities • Timer Services • Scalability • Application Error Handling • General Multi-Core issues • Assignment of runtime objects to cores • Startup of Multi-Core systems • Shutdown of Multi-Core systems • Configuration of Multi-Core systems • Services in Multi-Core systems • Debugging and Tracing |
| 6 | AUTOSAR_SRS_ SoftwareClusterConnection.pdf | 1.需求索引,SRS_SwCluC_* 2. 本文档定义CP平台中软件集群连接的需求。软件集群连接有几个逻辑子单元: • Binary Manifest • Cross Cluster Communication • Proxy Module – High Proxy Module – Low Proxy Module 3. 软件群集连接提供以下功能: •连接部署在同一台机器上的二进制对象 •用所谓的代理模块替换应用软件集群中本地不可用的BSW模块,这些模块是集成软件所需的接口。 •通过RTE实施插件在软件集群与RTE之间实现VFB通信功能 |
| 7 | AUTOSAR_SRS_TimeService.pdf | 1.需求索引,前缀: ”RS_BRF_*” –> ”SRS_Tm_*” 2. 本规范定义了BSW模块时间服务的需求。时间服务模块是服务层的一部分。该模块为基于时间的功能提供服务。用例包括: •Time measurement •Time based state machine •Timeout supervision •Busy waiting |
| 8 | AUTOSAR_TR_ HWTestManagementIntegration Guide.pdf | 1. 本文档简要描述了标准AUTOSAR软件平台中的硬件测试管理概念集成。它应作为用户指南,供那些希望按照AUTOSAR方法和过程将HTMSS(硬件测试管理启动和关闭)模块作为AUTOSAR BSW模块实施的人员使用 2. 本文档提供了HTMSS的一般用例和需求。在AUTOSAR软件环境中集成微控制器专用测试包(MSTP),标准AUTOSAR模块和MSTP之间的交互应通过HTMSS模块来管理。HTMSS的基本功能包括: • HTMSS模块初始化(包括MSTP模块,如果需要) • 基于HTMSS模块配置配置MSTP测试的接口 • 启动MSTP测试执行的接口 • 收集MSTP测试结果并将其提供给所需的模块和应用程序SWC,以评估结果并做出相关决定 |
| 9 | AUTOSAR_SWS_COMManager.pdf | 1.需求索引,前缀: •”SRS_BSW_*” –> ”SWS_ComM_*” •”SRS_ModeMgm_*” –> ”SWS_ComM_*” 2. ComM是基本软件(BSW)的一个组件。它是一个资源管理器,它封装了底层通信服务的控制。ComM模块的目的是:为用户简化总线通信堆栈的使用,其中用户可以是可运行的实体、SW C、BswM(例如,经由BswM的SW-C请求)或DCM(诊断目的所需的通信) 3.详细api,索引到SWS_ComM_* 4.时序图 • Transmission and Reception start (CAN) • Passive Wake-up (CAN) • Network shutdown (CAN) • Communication request • Synchronized PNC shutdown |
| 10 | AUTOSAR_SWS_ DefaultErrorTracer.pdf | 1.需求索引,前缀: •”RS_Diag_*” –> ”SWS_Det_*” •SRS_ARTICP_04087 –>SWS_Det_00204 •”SRS_BSW_*” –> ”SWS_Det_*” 2. 本规范描述了默认错误跟踪器的API。基本软件中检测到的所有开发和运行时错误都将报告给该模块 3.详细api,索引到SWS_Det_* 4.时序图 • Initialization • Error Reporting |
| 11 | AUTOSAR_SWS_ FunctionInhibitionManager.pdf | 1.需求索引,前缀: •”SRS_BSW_*” –> ”SWS_Fim_*” •”SRS_Fim_*” –> ”SWS_Fim_*” 2. FIM(功能抑制管理器)负责为软件组件及其功能提供控制机制。FIM允许查询软件组件的许可/抑制状态及其功能。在FiM上下文中,FID(FID-功能标识符)标识应用程序功能以及该特定标识符的禁止条件。功能在执行前轮询其FID的许可状态。如果禁止条件适用于特定标识符,则不再允许执行相应的功能。通过FiM,可以配置这些功能的抑制,甚至可以通过校准进行修改 3.详细api,索引到SWS_Fim_* 4.时序图 • Initialization sequence of FiM • FiM_DemTriggerOnMonitorStatus |
| 12 | AUTOSAR_SWS_ HWTestManager.pdf | 1.需求索引,前缀: •”SRS_BSW_*” –> ”SWS_HTMSS_*” •”SRS_HTMSS_*” –> ”SWS_HTMSS_*” 2. 本规范描述了HTMSS(硬件测试管理启动和关闭)模块的概念、接口和配置。该模块的基本功能包括从MSTP收集测试结果/状态、配置MSTP测试、启动测试执行、向EcuM模块和应用程序SWC提供MSTP测试状态以评估系统行为的测试结果 3.详细api,索引到SWS_HTMSS_* |
| 13 | AUTOSAR_SWS_OS.pdf | 1.需求索引,前缀: •”SRS_BSW_*” –> ”SWS_Os_*” •”SRS_Frt_*” –> ”SWS_Os_*” •”SRS_Os_*” –> ”SWS_Os_*” 2. 本文件描述了AUTOSAR操作系统的基本需求。对AUTOSAR操作系统进行分类,以下是基本功能: •静态配置和缩放 •可以对实时性能进行推理 •提供基于优先级的调度策略 •在运行时提供保护功能(内存、计时等) •可托管在低端控制器上,无需外部资源 3.详细api,索引到SWS_Os_* |
| 14 | AUTOSAR_SWS_ SoftwareClusterConnection.pdf | 1.需求索引,前缀: •”SRS_BSW_*” –> ”SWS_SwCluC_*” •”SRS_SwCluC_*” –> ”SWS_SwCluC_*” 2. 本规范描述了AUTOSAR基本软件模块软件群集连接的功能、API和配置 3.详细api,索引到SWS_SwCluC_* |
| 15 | AUTOSAR_SWS_TimeService.pdf | 1.需求索引,前缀: •”SRS_BSW_*” –> ”SWS_Tm_*” •”SRS_Tm_*” –> ”SWS_Tm_*” 2. 本规范规定了AUTOSAR基本软件模块“时间服务”的功能、API和配置。 时间服务模块是服务层的一部分。该模块为基于时间的功能提供服务。用例包括: • Time measurement • Time based state machine • Timeout supervision • Busy waiting 3.详细api,索引到SWS_Tm_* |
5、MCAL(微控制器抽象层)(7个)
| 5.5 | File Name | 说明 |
| 1 | AUTOSAR_SRS_ SPALGeneral.pdf | 1.需求索引,前缀: ”RS_BRF_*” –> ”SRS_SPAL_*” 2. 本章包含适用于微控制器和ECU抽象层的所有模块的一般需求。范围包括以下模块: • 内存驱动器和接口(内部/外部EEPROM、闪存、闪存 EEPROM仿真) • I/O驱动器(端口、ADC、DIO、PWM、ICU、OCU) • I/O硬件抽象 • ECU车载通信驱动器和处理器(SPI) • 系统驱动程序(内部/外部看门狗、MCU、GPT、RAM测试) |
| 2 | AUTOSAR_SRS_CoreTest.pdf | 1.需求索引,前缀: ”RS_BRF_*” –> ”SRS_CoreTst_*” 2. 本文件定义了AUTOSAR中CoreTest的一般规则和需求。本模块描述了根据汽车规范指定测试用例的API需求。 3.完整测试包括两个步骤: •运行专用指令序列以模拟门和触发器,并计算校验和/签名作为结果表示。 •提供比较的校验和/签名-或-将计算的校验和与参考值(“黄金参考值”)进行比较,并决定测试是通过还是失败-或-存储计算出的校验和并按需提供给外部调用方 |
| 3 | AUTOSAR_SRS_GPTDriver.pdf | 1.需求索引,前缀: ”RS_BRF_*” –> ”SRS_Gpt_*” 2. 本文档规定了GPT驱动程序模块的需求。GPT驱动程序是微控制器抽象层(MCAL)的一部分。它初始化并控制微控制器的内部通用定时器(GPT)。 GPT驱动程序提供服务和配置参数: • 启动和停止硬件计时器 • 获取计时器值 • 控制时间触发的中断通知 • 控制时间触发的唤醒中断 |
| 4 | AUTOSAR_SRS_MCUDriver.pdf | 1.需求索引,前缀: ”RS_BRF_*” –> ”SRS_Mcu_*” 2. 本文档规定了模块MCU驱动程序的需求。MCU驱动程序[微控制器单元]为其他MCAL软件模块所需的基本微控制器初始化、断电功能、复位和微控制器特定功能提供服务。 MCU驱动程序直接访问微控制器硬件,并位于微控制器抽象层(MCAL)中 |
| 5 | AUTOSAR_SWS_CoreTest.pdf | 1.需求索引,前缀: •”SRS_BSW_*” –> ”SWS_CorTst_*” •”SRS_CoreTst_*” –> ”SWS_CorTst_*” •”SRS_SPAL_*” –> ”SWS_CorTst_*” 2. 本规范规定了Core Test Driver模块的功能、API和配置。核心测试驱动程序提供配置、启动、轮询、终止和通知应用程序核心测试结果的服务。它还提供以预定义方式返回测试结果的服务。 核心测试驱动程序直接访问微控制器核心,无需任何中间软件层,并且位于微控制器抽象层(MCAL)中 3.详细api,索引到SWS_CorTst_* 4.时序图 •Initialization •Deinitialization •Background Test |
| 6 | AUTOSAR_SWS_GPTDriver.pdf | 1.需求索引,前缀: •”SRS_BSW_*” –> ”SWS_Gpt_*” •”SRS_Gpt_*” –> ”SWS_Gpt_*” •”SRS_SPAL_*” –> ”SWS_Gpt_*” 2. 本规范规定了GPT驱动程序的功能、API和配置。GPT驱动程序是微控制器抽象层(MCAL)的一部分。它初始化并控制微控制器的内部通用定时器(GPT) 3.详细api,索引到SWS_Gpt_* |
| 7 | AUTOSAR_SWS_MCUDriver.pdf | 1.需求索引,前缀: •”SRS_BSW_*” –> ”SWS_Mcu_*” 2. 本规范描述了MCU[微控制器单元]驱动程序的功能和API。MCU驱动程序为其他MCAL软件模块所需的基本微控制器初始化、断电功能、复位和微控制器特定功能提供服务。 MCU驱动程序功能: • MCU时钟、PLL、时钟预分频器和MCU时钟分配的初始化 • RAM部分初始化 • 激活µC降低功率模式 • 激活µC复位 • 提供从硬件获取重置原因的服务 3.详细api,索引到SWS_Mcu_* 4.时序图 •Example Sequence for MCU initialization services •Mcu_GetResetReason •Mcu_GetResetRawValue •Mcu_PerformReset |
未完继续:学习记录:AUTOSAR R20-11的阅读记录(四)【CP(5.6-5.10)】