0x00 官方通知;
最新消息:OriginBot V2.0.2版本正式发布,新增Webviz可视化,点击查看
0x01 Webviz基本概念;
Webviz和rviz一样都是ROS开发中的可视化利器。区别在于rviz只能运行在ros环境中,而Webviz可能多平台运行,还可以在网页上调试运行,所见即所得。这非常适合像我这种不喜欢使用命令行的小白。
而本期我们要介绍的Froxglove就是Webviz的一种,专门用于ROS2;以下是该软件的demo界面:
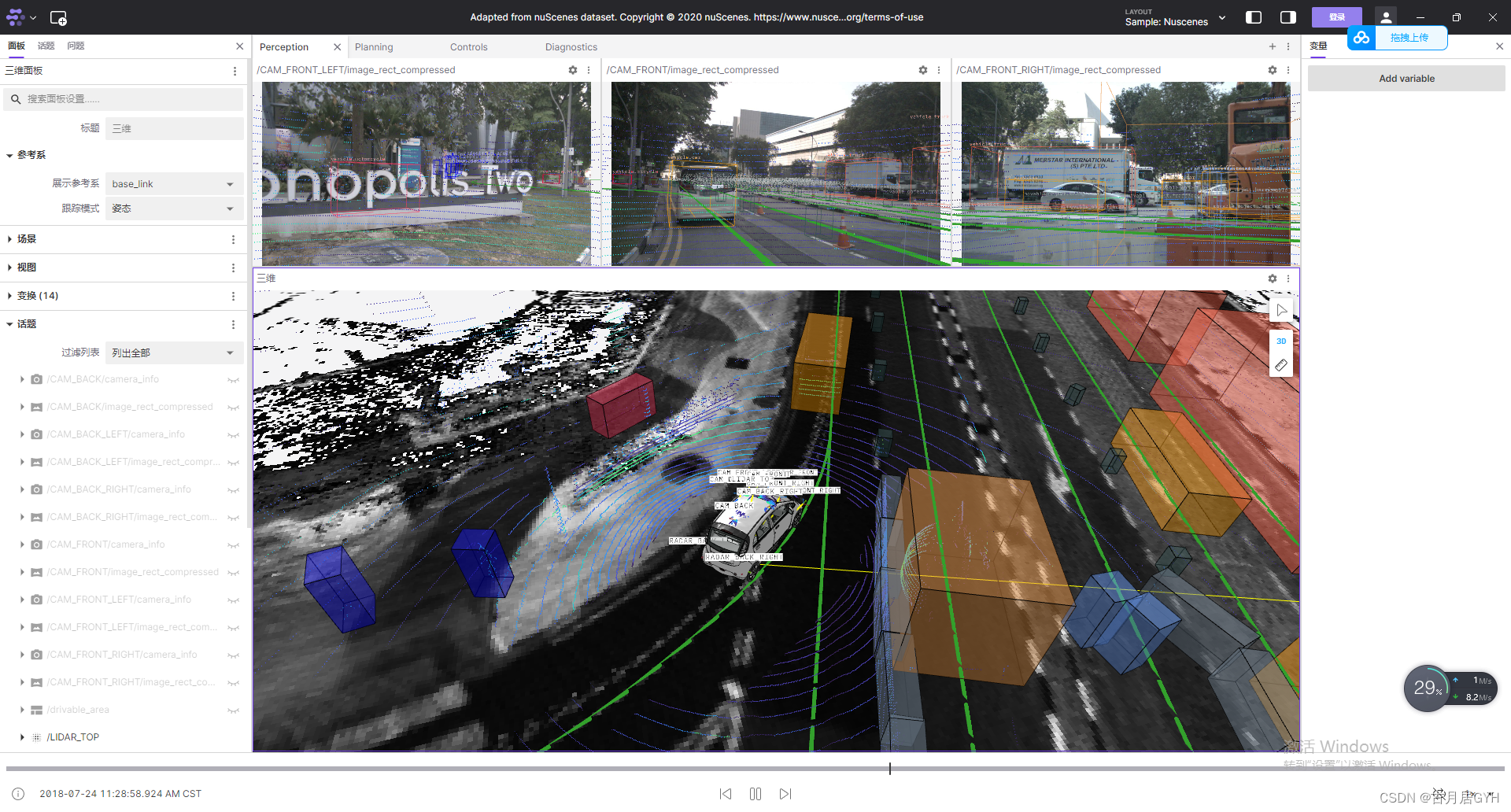
是不是很强大的样子,迫不及待的想试一下。
0x02 软件安装;
参考:WebViz可视化 - OriginBot智能机器人开源套件
但是这个软件不好下载,需要用梯子才能下载成功,这里小编给大家分享一下百度网盘的下载链接:
链接:https://pan.baidu.com/s/1tJ7Cs7Y2J3hFuNzC4EJGeg
提取码:7jlx
我是用的是Win11系统。
0x03 环境搭建;
Foxglove有两种连接ros的方式:
1、离线模式(bag回放)
2、在线连接(websocket,TCP)
这里我们使用在线连接的方式,所以需要安装Foxglove的软件包,
#安装rosbridge,此处使用galactic目的为避免与tros冲突,不影响通信效果
$ sudo apt install ros-galactic-rosbridge-suite
注意,需要将Originbot小车的镜像更新到最新版,旧版无法找到该功能包。新版中安装了 ros-galactic。
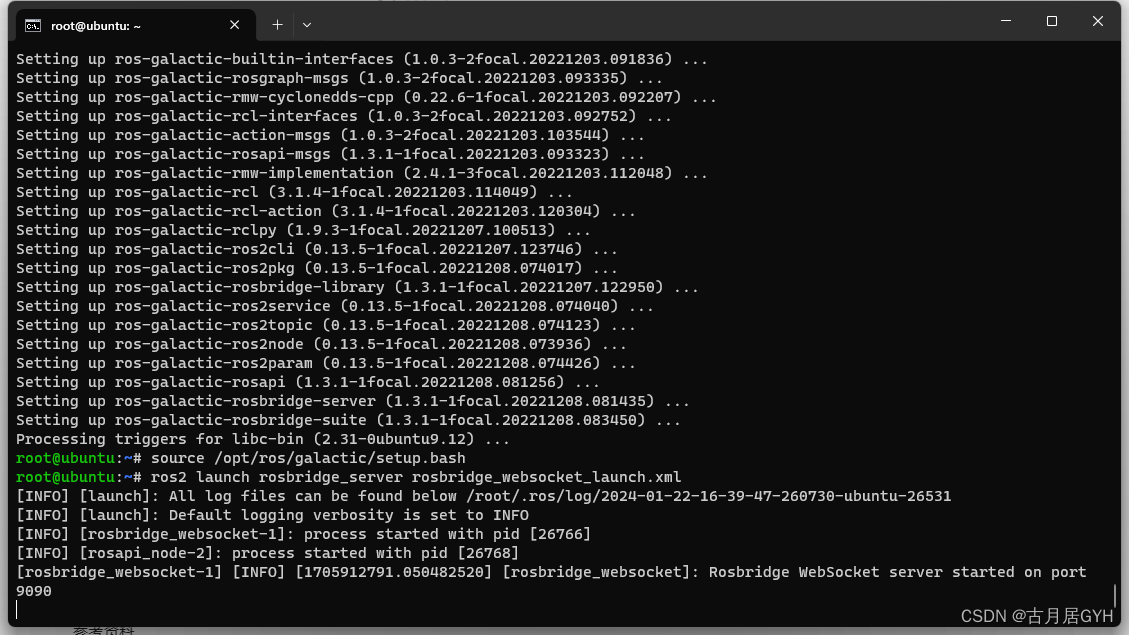
安装完成后即可调用以下命令启动Froxglove bridge
$ source /opt/ros/galactic/setup.bash
$ ros2 launch rosbridge_server rosbridge_websocket_launch.xml
0x04 Foxglove 界面可视化;
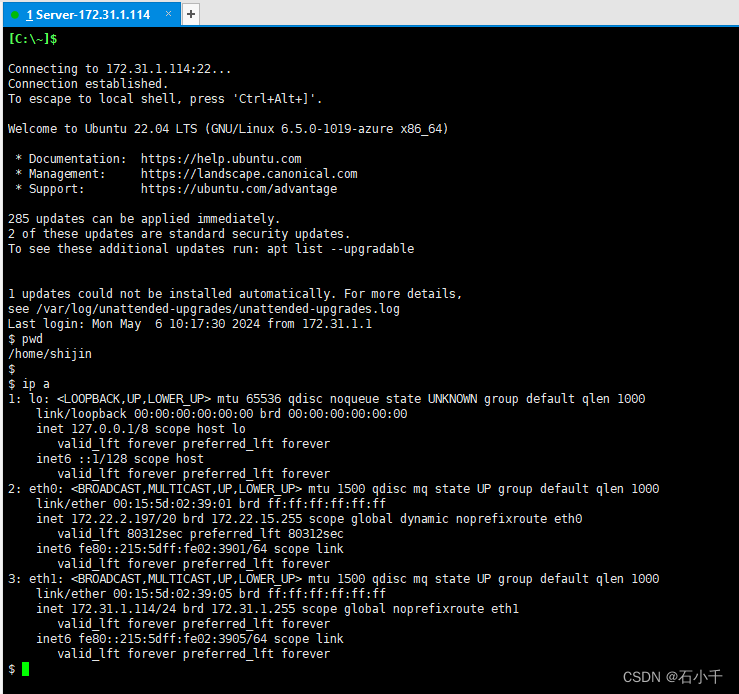
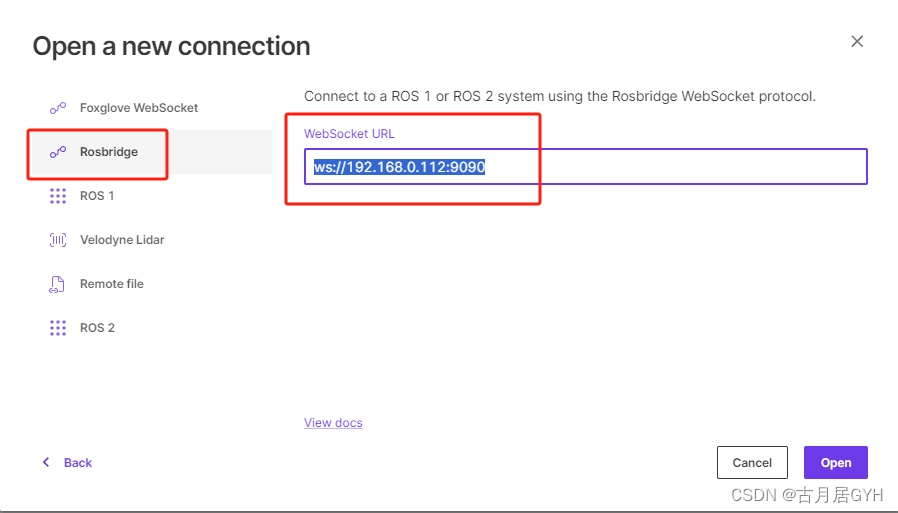
参考Originbot打开一个新的连接。以下是我小车的IP地址。
连接成功之后就可以使用各种 panel 啦,Foxglove就是由各种的pannel组成的。
0x05 添加相机可视化;
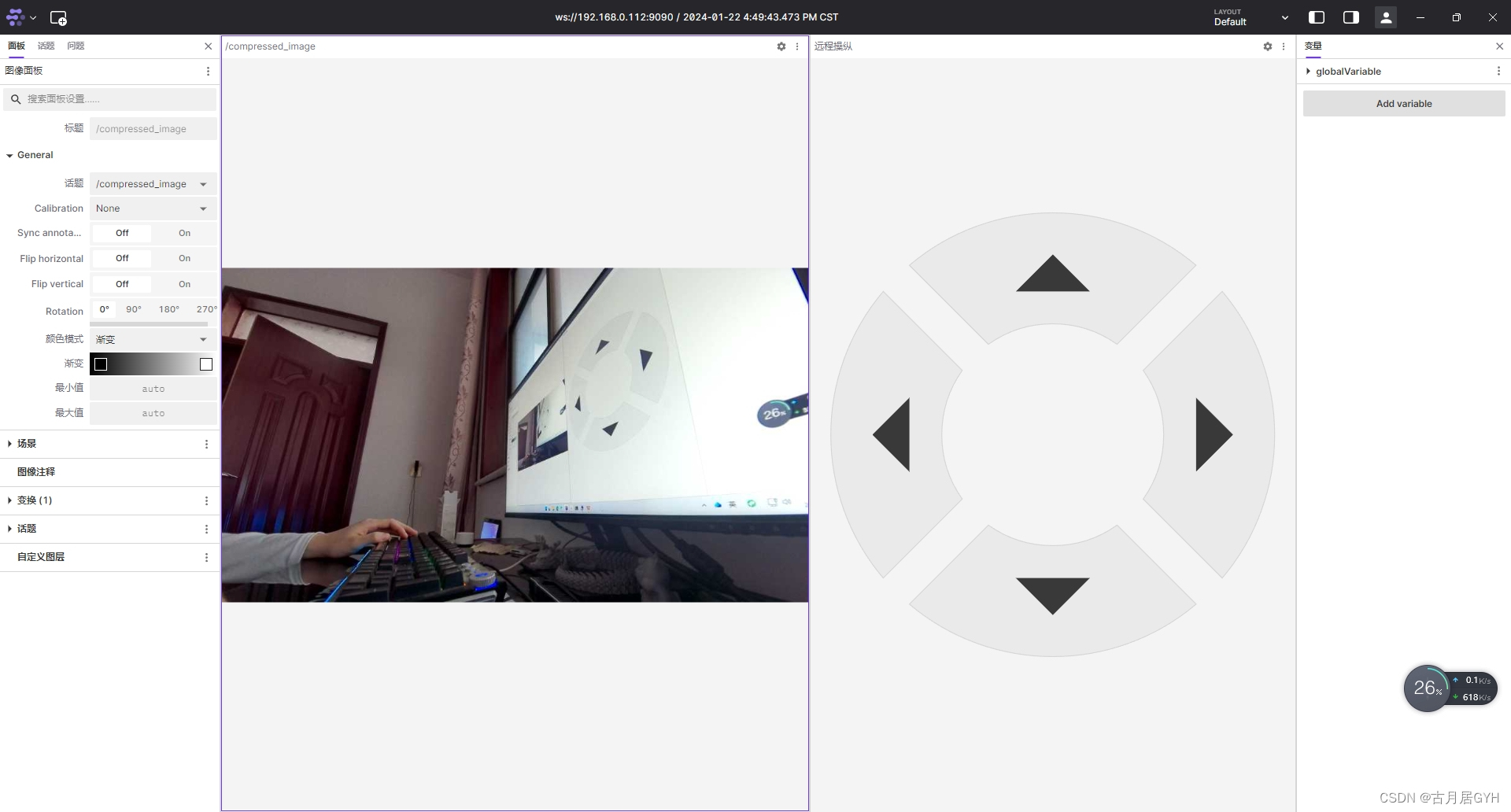
首先使用以下命令启动小车相机:
ros2 launch originbot_bringup camera.launch.py
随后在 Foxglove 中添加图像面板,订阅压缩后的图像数据/compressed_image,就显示出来啦。
右边的是我添加的远程操纵面板,用于发布小车的cmd_vel数据;
0x05 添加Originbot小车状态;
Display a color-coded label to indicate threshold values in your data.
显示一个颜色编码的标签,以指示数据中的阈值。
'通用 '面板中的 'Message path' 和 'style'设置如下:
Message path to the data value you want to track
要跟踪的数据值的消息路径,ROS消息数据;
Style of indicator ("Bulb" or "Background")
第二个选项用于设置标签形状,Bulb为灯泡形状,Background为背景颜色。
随后设置最重要的 '规则'
Comparison :
点击《OriginBot V2.0.2新功能体验::Froxglove》 - 古月居