一、FOC为什么使用串联控制器
在此说明,串联形式(内外环形式,速度环和电流环控制器串联)并不是必须的,但是对于线性控制系统来说,电机属于非线性控制对象,早期工程师们为了处理电机的非线性,将电机的非线性进行线性化近似,串联形式一方面忽略了一部分电机的非线性动态,一方面又降低了控制器的阶数,且实现了对电机电流的约束,即同时解决了降阶、线性化和状态约束三个难题!
而在现代控制理论中,存在很多非串级的MIMO控制策略,其控制器设计较为复杂,因为其需要同时考虑电机的高阶、非线性、状态约束等问题。
在电机控制的Field-Oriented Control (FOC) 中,速度环和电流环采用串联形式是基于控制系统设计原则和电机动力学特性的考虑。这种一阶串联控制器的结构反映了控制系统对电机物理行为的逐级控制逻辑(此处假设了电磁时间常数和机械时间常数两者之间的巨大差异,但是对于某些特殊的伺服电机,两者的时间常数可能相近),即先精确控制电流,再通过电流控制实现对速度的间接调控。以下是采用多速率的串联形式的主要原因:
1. 分层、分时的控制逻辑
-
电流环:作为内环,负责直接控制电机定子绕组中的实际电流(d轴电流Id和q轴电流Iq),使其尽可能准确地跟随给定的电流指令。电流环是基础控制层,它的响应速度最快,确保了电机内部电磁场的快速、精确建立,直接影响转矩和磁链的控制效果。
-
速度环:作为外环,设定电机的期望转速,并根据实际转速与设定值之间的偏差调整电流环的参考指令(通常是 q 轴电流 iq ,如果涉及到基于单电流环的弱磁控制时,一些方案可能会切换到 d 轴电流 id )。速度环通过对电流指令的调整来间接控制电机的速度,其响应速度相对较慢,关注的是系统的稳态性能和动态响应。
2. 控制系统稳定性与鲁棒性
-
内环优先:电流环作为最内层的闭环,其稳定性直接影响到整个系统的稳定性。电流环的快速响应能够迅速抑制扰动,保证电机内部状态的稳定,为速度环提供良好的工作基础。
-
抗干扰能力:电流环对电机内部电流的精确控制有助于隔离外部扰动对速度控制的影响。例如,负载突变、电机参数变化等扰动主要通过电流环得到快速抑制,减少了这些因素对速度控制的直接冲击。
3. 多层次控制目标的实现
-
精细控制:电流环的精确控制提供了对电机转矩和磁链的直接操控手段,满足了对电机转矩响应、磁链恒定等精细控制需求。
-
全局性能:速度环则关注系统的总体运动性能,如稳态速度精度、加速度控制、速度跟踪性能等。通过调整电流指令,速度环可以实现对电机运动状态的全局优化。
4. 控制系统的灵活性与扩展性
- 易于增删控制环节:串联结构便于添加或删除中间控制环节,如在电流环和速度环之外增加位置环以实现精确的位置控制。这种分层设计使得控制系统结构清晰,各环节功能明确,方便进行功能扩展或简化。
5. 优化资源分配
- 优先保证关键性能:电流环的快速响应能力优先保证了电机转矩控制的实时性和准确性,这对于许多高性能应用(如伺服驱动、高速加工设备等)至关重要。速度环则在满足电流环控制的基础上,进一步优化电机的速度性能。位置控制依亦然。
综上所述,电机控制FOC中速度环和电流环采用串联形式,是基于分层控制逻辑、控制系统稳定性与鲁棒性、多层次控制目标的实现、灵活性与扩展性以及优化资源分配等方面的综合考量。这种结构既符合电机动力学特性,又能有效实现对电机速度、转矩和磁链的精确控制,满足各类应用对电机性能的高标准要求。
二、电流环参数计算
在电机控制的Field-Oriented Control (FOC) 中,电流环的作用至关重要,它是整个控制系统的核心组成部分之一。电流环的主要作用包括:
-
精确电流控制:电流环负责控制电机定子绕组中的电流,确保它们准确跟随给定的电流指令(d轴电流Id和q轴电流Iq)。精确控制电流是实现磁场定向的基础,因为只有当电流准确地沿着d轴和q轴分解,才能有效地控制电机的磁通和转矩。
-
转矩控制:q轴电流Iq直接对应于电机产生的电磁转矩。通过精确控制Iq,可以实现对电机转矩的精确、快速控制,这对于要求高动态响应和精确转矩控制的应用(如机器人关节、精密定位系统等)至关重要。
-
磁链控制:d轴电流Id主要影响电机的磁链,即气隙磁通。通过控制Id,可以实现磁链控制,这对于永磁同步电机(PMSM)保持电机运行效率和进行弱磁控制至关重要。
-
系统稳定与保护:电流环作为最内层的闭环控制系统,对系统的稳定性和安全性起着关键作用。它能迅速响应电流偏差,通过调节逆变器的输出电压,确保电流在允许范围内,防止过电流导致的电机过热、绝缘损坏或逆变器过载。
1、此处先以PI控制(其他控制器亦可)为例,进行电机控制相关环路参数的计算
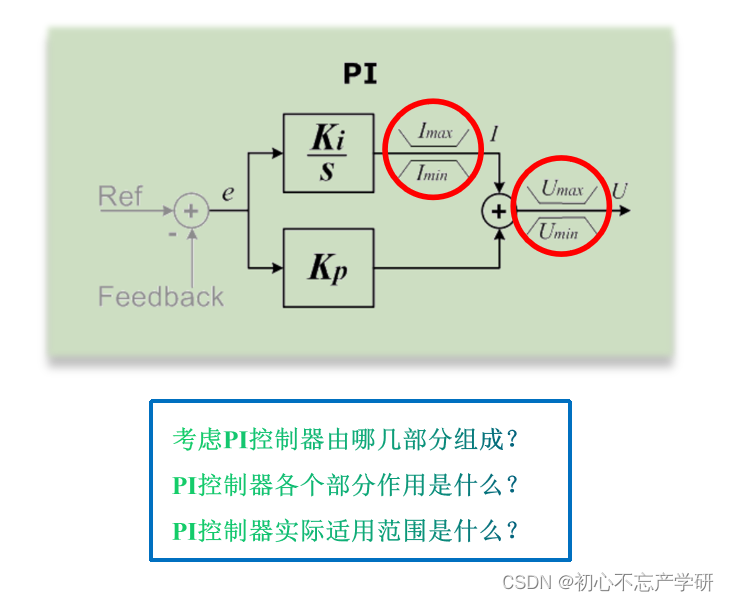
2、理想条件下,计算电流环PI的参数(PI为线性控制器)
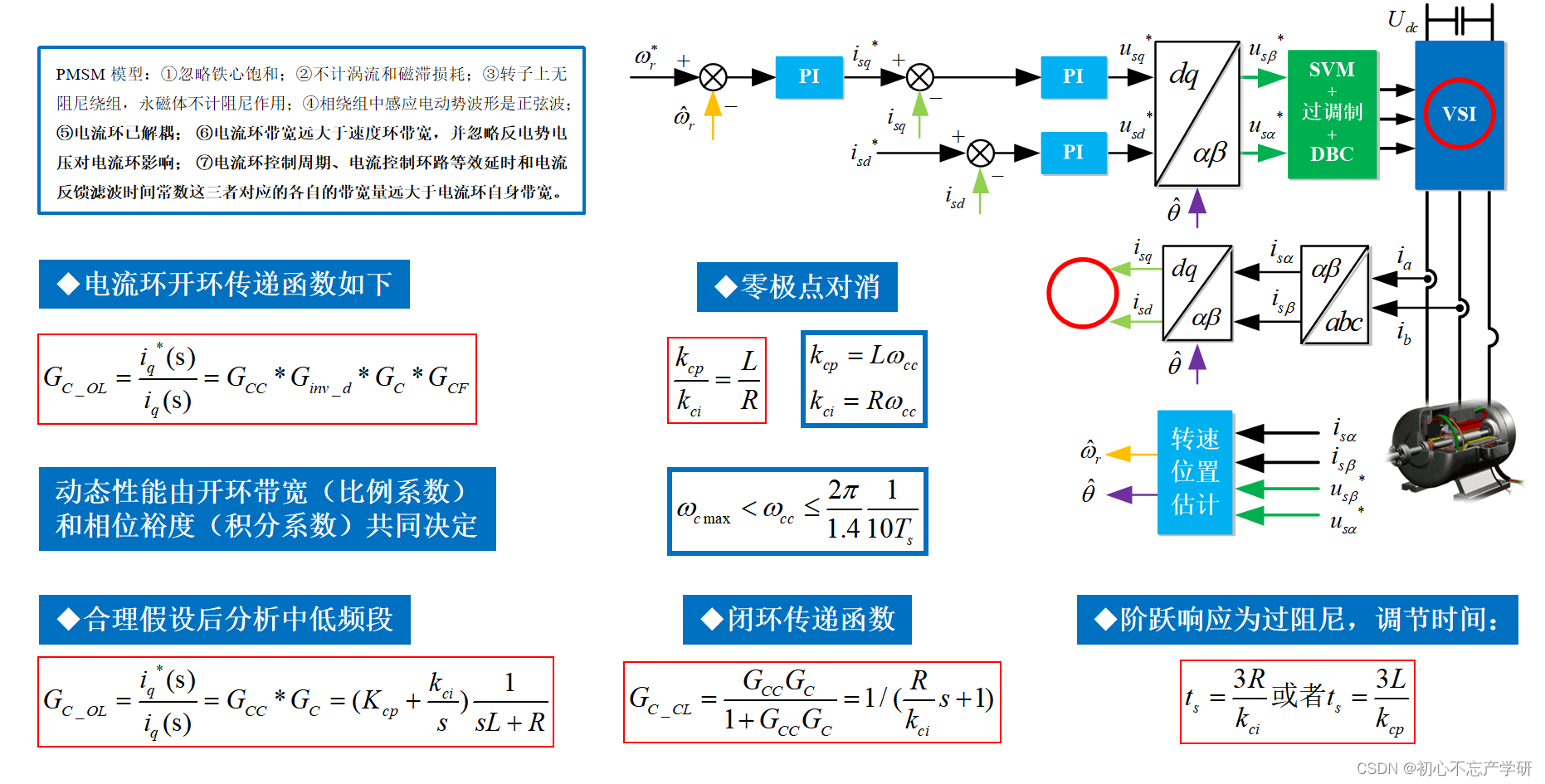
3、考虑电流控制的环路延时,以计算电流环带宽的上限

三、电流环优化方向
电流环作为电机控制系统中的核心组成部分,其优化方向主要集中在以下几个方面,旨在提高电流控制的精度、响应速度、鲁棒性和系统整体性能:
-
控制器参数整定:
- 比例增益(Kp):调整Kp以在保证系统稳定性的前提下,提高电流环的响应速度和对阶跃扰动的抑制能力。过大的Kp可能导致系统振荡,过小则响应迟钝。
- 积分增益(Ki):设置合适的Ki以消除稳态误差,同时避免过大的积分作用导致响应变慢。Ki的选择需兼顾稳态精度与动态性能。
-
带宽优化:
- 提升电流环带宽:在电机和逆变器允许的范围内,适当提高电流环带宽,可以加快电流响应速度,提升系统动态性能。带宽的选择需考虑电机电感、逆变器开关频率、采样时间等因素。
- 闭环频率特性:确保电流环在目标带宽内具有足够的相位裕度和幅值裕度,以保证系统稳定性和抗扰动能力。
-
滤波器设计:
- 电流传感器滤波:优化电流传感器前端的低通滤波器,减少高频噪声对控制系统的干扰,同时保证电流信号不失真。
- 控制算法内部滤波:在控制算法中引入适当的数字滤波器(如PI、PID、Lead-Lag等),改善系统的动态特性,抑制不必要的振荡。
-
非线性补偿:
- 死区补偿:逆变器开关器件的死区时间会导致电流控制的非线性,通过软件或硬件手段进行精确补偿,减少死区效应对电流控制精度的影响。
- 磁链观测器补偿:对于永磁同步电机(PMSM),优化磁链观测器算法,提高磁链估计精度,间接改善电流控制性能。
-
抗扰动策略:
- 负载扰动抑制:采用前馈控制、滑模控制、自适应控制等方法,根据负载变化预测或实时估计,主动抵消负载扰动对电流的影响。
- 参数变化适应:设计自适应控制器或在线辨识算法,使系统能适应电机参数(如电阻、电感)的变化,保持电流控制性能。
-
采样与控制周期优化:
- 提高采样频率:增加电流采样频率,提高控制系统对电流变化的感知精度和响应速度。
- 减小控制周期:在硬件条件允许的情况下,缩短控制周期(如PWM调制周期),使得电流指令更新更频繁,提高控制精度。
-
硬件升级与优化:
- 高性能处理器:采用更高性能的处理器或FPGA,提高控制算法的执行速度和计算精度。
- 电流传感器:选用高精度、快速响应的电流传感器,减少测量误差和延迟。
-
软件算法改进:
- 先进控制策略:引入滑模控制、模型预测控制(MPC)、自抗扰控制(ADRC)等先进控制算法,增强系统对不确定性和扰动的抑制能力。
- 状态观测器:改进状态观测器设计,提高电流和磁链等内部状态的估计精度。
综上所述,电流环的优化方向涵盖了控制器参数整定、带宽选择、滤波器设计、非线性补偿、抗扰动策略、硬件升级、软件算法改进等多个层面,目的是全方位提升电流控制的精度、响应速度、鲁棒性和系统整体性能。实际优化过程中需根据具体电机类型、应用场景及硬件条件综合考虑,通过仿真与实验验证优化效果。
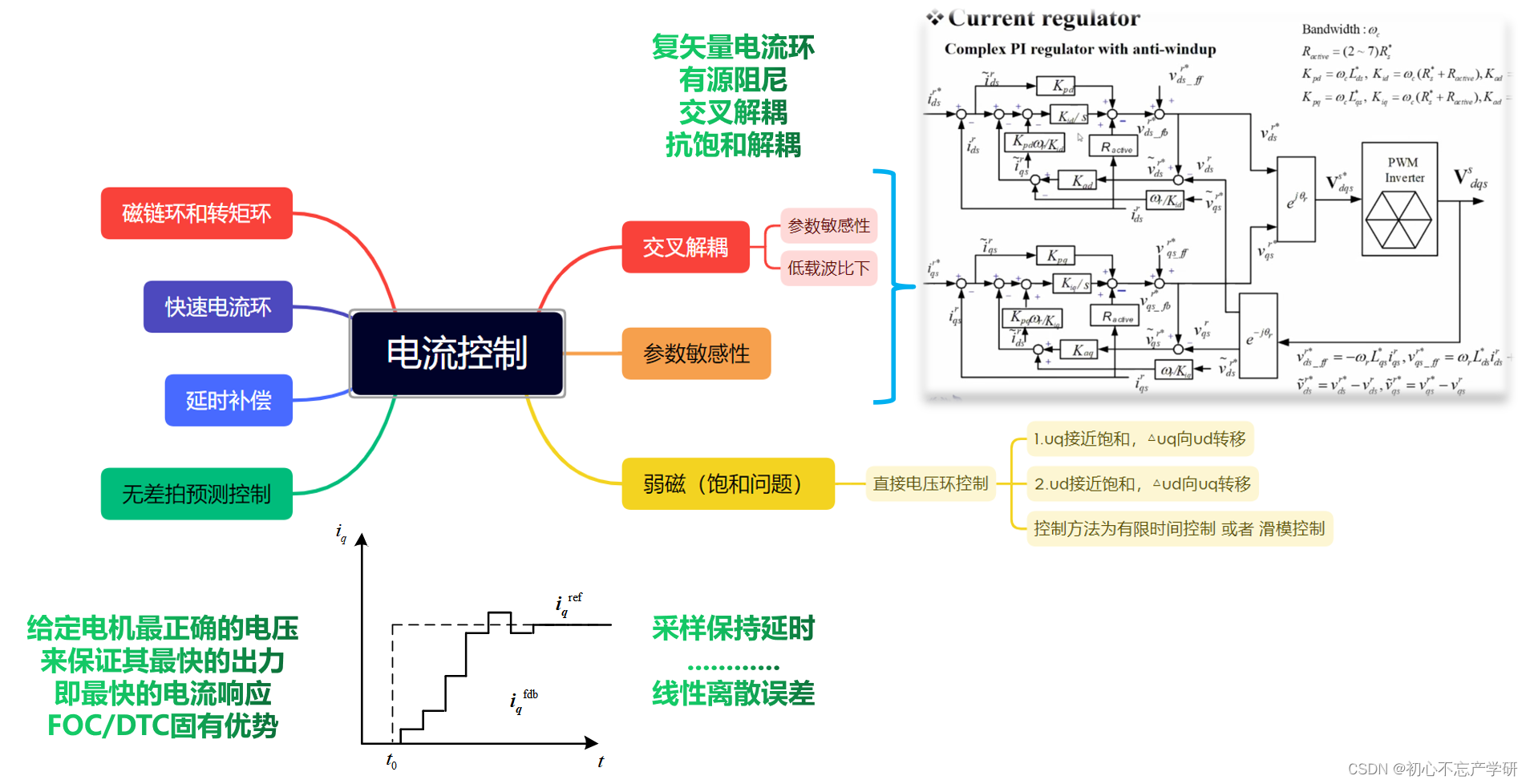
在实际应用中,还面临很多其他的问题,为了进一步提高电流环的性能,电流环的改进算法还包括复矢量电流环、有源阻尼前馈、交叉解耦(扰动观测器解耦、前馈反馈解耦等)、抗饱和解耦、与弱磁控制相关的优化(单电流环、输出电压幅值控制、输出电压角度控制)、与低载波比问题相关的优化、与输出LC滤波器谐振问题相关的优化等。旨在解决不同工况下的具体问题,提高电流控制的精度、动态性能及系统整体稳定性。待后续继续更新。





![[贪心] 带期限的作业调度问题](https://img-blog.csdnimg.cn/direct/a0760b6b77dc49e4bc4f021a3e2923e7.png)