最近在学习 ORB-SLAM3 的源代码,并模仿、重构了相机模型的实现
在学习的过程中发现针孔相机 (Pinhole) 与鱼眼相机 (Fisheye) 都有畸变参数,但是鱼眼相机无法使用 cv::undistort 函数去畸变
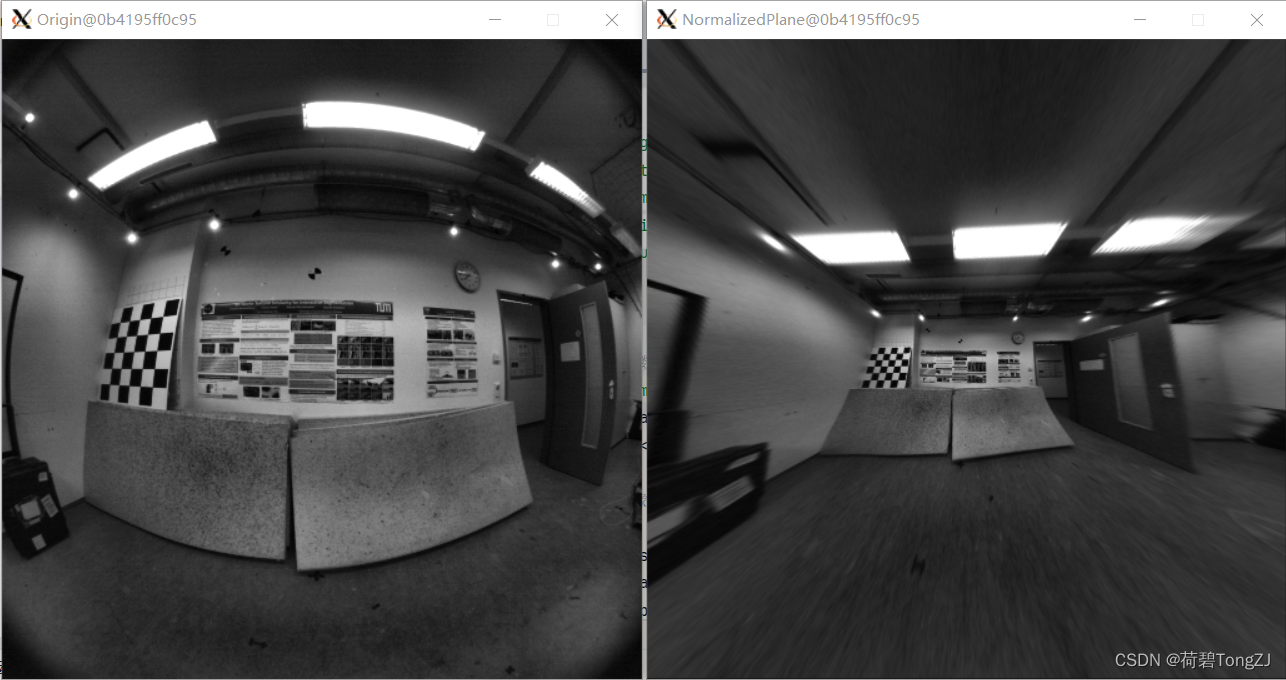
在对鱼眼相机的深度归一化平面进行可视化后,发现鱼眼相机真的不需要去畸变
参考文献:A generic camera model and calibration method for conventional, wide-angle, and fish-eye lenses
相机基类模型
../logging.hpp 中主要调用了 glog 库,并定义了 ASSERT(expr, msg) 宏
基类 Base 初始化时需要输入 imgSize (图像尺寸)、intrinsics (相机内参)、distCoeffs (畸变参数)
#ifndef ZJSLAM__CAMERA__BASE_HPP
#define ZJSLAM__CAMERA__BASE_HPP
#include <Eigen/Core>
#include <opencv2/opencv.hpp>
#include <sophus/se3.hpp>
#include "../logging.hpp"
namespace camera {
typedef std::vector<float> Vectorf;
enum CameraType {
PINHOLE, FISHEYE
};
class Base {
protected:
cv::Size mImgSize;
Vectorf mvParam;
cv::Mat mMap1, mMap2; // 畸变矫正映射
public:
Sophus::SE3d T_cam_imu;
typedef std::shared_ptr<Base> Ptr;
explicit Base(const cv::Size imgSize, const Vectorf &intrinsics, const Vectorf &distCoeffs,
const Sophus::SE3d &T_cam_imu = Sophus::SE3d()
) : mImgSize(imgSize), mvParam(intrinsics), T_cam_imu(T_cam_imu) {
ASSERT(intrinsics.size() == 4, "Intrinsics size must be 4")
mvParam.insert(mvParam.end(), distCoeffs.begin(), distCoeffs.end());
}
virtual CameraType getType() const = 0;
// 参数读取
inline void setParam(int i, float value) { mvParam[i] = value; }
inline float getParam(int i) const { return mvParam[i]; }
inline size_t getParamSize() const { return mvParam.size(); }
Vectorf getDistCoeffs() const { return {mvParam.begin() + 4, mvParam.end()}; }
// 内参矩阵 K
#define GETK(vp, K) (K << vp[0], 0.f, vp[2], 0.f, vp[1], vp[3], 0.f, 0.f, 1.f)
virtual cv::Mat getK() const { return GETK(mvParam, cv::Mat_<float>(3, 3)); };
virtual Eigen::Matrix3f getKEig() const { return GETK(mvParam, Eigen::Matrix3f()).finished(); };
// 3D -> 2D
virtual cv::Point2f project(const cv::Point3f &p3D) const = 0;
virtual Eigen::Vector2d project(const Eigen::Vector3d &v3D) const = 0;
virtual Eigen::Vector2f project(const Eigen::Vector3f &v3D) const = 0;
virtual Eigen::Vector2f projectEig(const cv::Point3f &p3D) const = 0;
// 2D -> 3D
virtual cv::Point3f unproject(const cv::Point2f &p2D) const = 0;
virtual Eigen::Vector3f unprojectEig(const cv::Point2f &p2D) const = 0;
// 去畸变
virtual void undistort(const cv::Mat &src, cv::Mat &dst) = 0;
// 绘制归一化平面 (z=1)
void drawNormalizedPlane(const cv::Mat &src, cv::Mat &dst);
};
}
#endif
鱼眼相机模型
因为在实现 C++ 的函数多态时,需要根据不同的输入值类型设计对应的计算过程 —— 但往往计算过程都是极其相似的,这给代码维护造成了麻烦
所以本文使用宏定义实现了这些计算过程
#ifndef ZJSLAM__CAMERA__KANNALA_BRANDT_HPP
#define ZJSLAM__CAMERA__KANNALA_BRANDT_HPP
#include "base.hpp"
namespace camera {
// 最大视场角 (90)
#define KANNALA_BRANDT_MAX_FOV M_PI_2
// 3D -> 2D
#define KANNALA_BRANDT_PROJECT_BY_XYZ(vp, p3D) \
float R = this->computeR(atan2f(hypot(p3D.x, p3D.y), p3D.z)); \
float phi = atan2f(p3D.y, p3D.x); \
return {vp[0] * R * cosf(phi) + vp[2], vp[1] * R * sinf(phi) + vp[3]};
#define KANNALA_BRANDT_PROJECT_BY_VEC3(vp, v3D) \
float R = this->computeR(atan2f(hypot(v3D[0], v3D[1]), v3D[2])); \
float phi = atan2f(v3D[1], v3D[0]); \
return {vp[0] * R * cosf(phi) + vp[2], vp[1] * R * sinf(phi) + vp[3]};
// 2D -> 3D
#define KANNALA_BRANDT_UNPROJECT_PRECISION 1e-6
#define KANNALA_BRANDT_UNPROJECT_BY_XY(cache, p2D) \
cv::Vec2f wxy = cache.at<cv::Vec2f>(p2D.y, p2D.x); \
return {wxy[0], wxy[1], 1};
class KannalaBrandt8 : public Base {
protected:
cv::Mat mUnprojectCache;
void makeUnprojectCache();
public:
typedef std::shared_ptr<KannalaBrandt8> Ptr;
explicit KannalaBrandt8(const cv::Size imgSize, const Vectorf &intrinsics, const Vectorf &distCoeffs,
const Sophus::SE3d &T_cam_imu = Sophus::SE3d()
) : Base(imgSize, intrinsics, distCoeffs, T_cam_imu), mUnprojectCache(mImgSize, CV_32FC2) {
ASSERT(distCoeffs.size() == 4, "Distortion coefficients size must be 4")
makeUnprojectCache();
}
CameraType getType() const override { return CameraType::FISHEYE; }
// 3D -> 2D
float computeR(float theta) const;
cv::Point2f project(const cv::Point3f &p3D) const override { KANNALA_BRANDT_PROJECT_BY_XYZ(mvParam, p3D) }
Eigen::Vector2d project(const Eigen::Vector3d &v3D) const override { KANNALA_BRANDT_PROJECT_BY_VEC3(mvParam, v3D) }
Eigen::Vector2f project(const Eigen::Vector3f &v3D) const override { KANNALA_BRANDT_PROJECT_BY_VEC3(mvParam, v3D) }
Eigen::Vector2f projectEig(const cv::Point3f &p3D) const override { KANNALA_BRANDT_PROJECT_BY_XYZ(mvParam, p3D) }
// 2D -> 3D
float solveWZ(float wx, float wy, size_t iterations = 10) const;
cv::Point3f unproject(const cv::Point2f &p2D) const override { KANNALA_BRANDT_UNPROJECT_BY_XY(mUnprojectCache, p2D) }
Eigen::Vector3f unprojectEig(const cv::Point2f &p2D) const override { KANNALA_BRANDT_UNPROJECT_BY_XY(mUnprojectCache, p2D) }
// 去畸变
void undistort(const cv::Mat &src, cv::Mat &dst) override { if (src.data != dst.data) dst = src.clone(); }
};
}
#endif
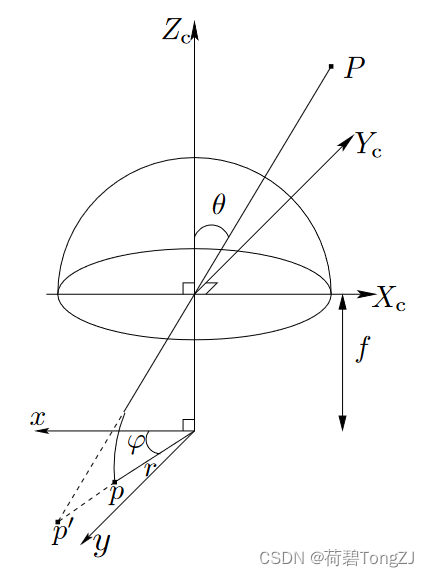
与针孔类型相似的,鱼眼模型也有焦距 ,光心
,以及畸变参数
借助这些参数,可以实现对世界坐标系下的点 、像素坐标系下的点
实现相互变换
project (世界坐标 → 像素坐标)
float KannalaBrandt8::computeR(float theta) const {
float theta2 = theta * theta;
return theta + theta2 * (mvParam[4] + theta2 * (mvParam[5] + theta2 * (mvParam[6] + theta2 * mvParam[7])));
}unproject (像素坐标 → 世界坐标)
根据 project 的过程,可以由像素坐标计算得到 ,并反向求得
:
由于 的取值是有上限的 (假设为
),也就是说
所以当 时,应当检查相机内参是否出错
使用梯度下降法使得 ,以求解
由于 是一个凹函数,所以只要保证迭代量正负号正确即可
当求得 时,便可以得到
:
而由于单目相机的深度没有什么意义,把 作为对应的世界坐标
(这里使用缓存的方式实现 unproject)
void KannalaBrandt8::makeUnprojectCache() {
float wx, wy, wz;
for (int r = 0; r < mImgSize.height; ++r) {
wy = (r - mvParam[3]) / mvParam[1];
for (int c = 0; c < mImgSize.width; ++c) {
wx = (c - mvParam[2]) / mvParam[0];
wz = this->solveWZ(wx, wy);
mUnprojectCache.at<cv::Vec2f>(r, c) = {wx / wz, wy / wz};
}
}
}
float KannalaBrandt8::solveWZ(float wx, float wy, size_t iterations) const {
// wz = lim_{theta -> 0} R / tan(theta) = 1
float wz = 1.f;
float R = hypot(wx, wy);
float maxR = this->computeR(KANNALA_BRANDT_MAX_FOV);
if (R > KANNALA_BRANDT_UNPROJECT_PRECISION) {
float theta = KANNALA_BRANDT_MAX_FOV;
if (R < maxR) {
// 最小化损失: (poly(theta) - R)^2
int i = 0;
float e;
for (; i < iterations; i++) {
float theta2 = theta * theta, theta4 = theta2 * theta2, theta6 = theta4 * theta2, theta8 = theta6 * theta2;
float k0_theta2 = mvParam[4] * theta2, k1_theta4 = mvParam[5] * theta4,
k2_theta6 = mvParam[6] * theta6, k3_theta8 = mvParam[7] * theta8;
e = theta * (1 + k0_theta2 + k1_theta4 + k2_theta6 + k3_theta8) - R;
if (abs(e) < R * KANNALA_BRANDT_UNPROJECT_PRECISION) break;
// 梯度下降法: g = (poly(theta) - R) / poly'(theta)
theta -= e / (1 + 3 * k0_theta2 + 5 * k1_theta4 + 7 * k2_theta6 + 9 * k3_theta8);
}
if (i == iterations) LOG(WARNING) << "solveWZ(" << wx << ", " << wy << "): relative error " << abs(e) / R;
}
wz = R / tanf(theta);
}
return wz;
}绘制深度归一化平面
深度归一化平面,即世界坐标点在 平面上的投影,也就是一幅图像
基本思路就是,通过 unproject 获取深度归一化平面的边界,然后通过 project 获取平面上各个点对应图像中的位置
void Base::drawNormalizedPlane(const cv::Mat &src, cv::Mat &dst) {
undistort(src, dst);
cv::Mat npMap1 = cv::Mat(mImgSize, CV_32FC1), npMap2 = npMap1.clone();
// 获取归一化平面边界 (桶形畸变)
float x, y, w, h, W = mImgSize.width - 1, H = mImgSize.height - 1;
x = this->unproject({0, H / 2}).x, y = this->unproject({W / 2, 0}).y,
w = this->unproject({W, H / 2}).x - x, h = this->unproject({W / 2, H}).y - y;
LOG(INFO) << "Normalized plane: " << cv::Vec4f(x, y, x + w, y + h);
// 计算畸变矫正映射
for (int r = 0; r < H; ++r) {
for (int c = 0; c < W; ++c) {
cv::Point2f p2D = this->project(cv::Point3f(w * c / W + x, h * r / H + y, 1));
npMap1.at<float>(r, c) = p2D.x;
npMap2.at<float>(r, c) = p2D.y;
}
}
cv::remap(dst, dst, npMap1, npMap2, cv::INTER_LINEAR);
}本文使用了 TUM-VI 数据集进行实验,Kannala-Brandt 相机的参数如下:
resolution: [512, 512]
intrinsics: [190.97847715128717, 190.9733070521226, 254.93170605935475, 256.8974428996504]
dist_coeffs: [0.0034823894022493434, 0.0007150348452162257, -0.0020532361418706202, 0.00020293673591811182]
(下面这段代码用了我自己写的其它东西,仅作参考)
void fisheye_test() {
// 加载 TUM-VI 数据集 相机参数
dataset::TumVI tumvi("/home/workbench/data/dataset-corridor4_512_16/dso");
YAML::Node cfg = tumvi.loadCfg();
auto cam(camera::fromYAML<camera::KannalaBrandt8>(cfg["cam0"]));
// 加载图像列表, 读取第一张图像
GrayLoader loader;
dataset::Timestamps vTimestamps;
dataset::Filenames vFilename;
tumvi.loadImage(vTimestamps, vFilename);
cv::Mat img = loader(vFilename[0]), dst1;
// 显示原始图像, 以及去畸变后的图像
cv::imshow("Origin", img);
cam->drawNormalizedPlane(img, img);
cv::imshow("NormalizedPlane", img);
cv::waitKey(0);
}








![[论文阅读]Adversarial Autoencoders(aae)和代码](https://img-blog.csdnimg.cn/direct/5bf58b10769c45638e265c32869fe288.png)