2024年4月8日,清华大学电子工程系在北京昌平两岸共盈科技产业园电子系地空协同智能无人平台基地成功举办“美团杯”智能无人机挑战赛,清华大学电子系党委书记沈渊、昌平区未来城管委会校城融合处处长熊玉川、清华大学团委副书记黄峰等出席。此外来自昌平区未来高教园、美团、大疆、天途的企业代表以及来自清华大学、上海交通大学、北京信息科技大学、北京航空航天大学、中国矿业大学的高校代表参与交流。此次活动充分展示了无人机技术成果,为参与者提供了交流学习的机会,有效推动了校校合作、校企共建,为科研院所和企业之间提供了科技创新和成果分享的平台。
首先,沈渊老师代表《智能无人机技术设计实践》课程组向与会嘉宾致欢迎词,并详细介绍了课程及比赛情况。智能无人机课程采用“赛课结合”的特色教学模式,为学生提供一个赛课互补、本研贯通的能力提升平台,激发学术志趣,提高实践能力,培养合作精神。沈渊老师回顾了往届比赛的迭代改进过程,希望建立一个线上公开课程与竞赛互动的社区,与各大高校及企业合作,进一步提高课程教育质量。

沈渊讲话
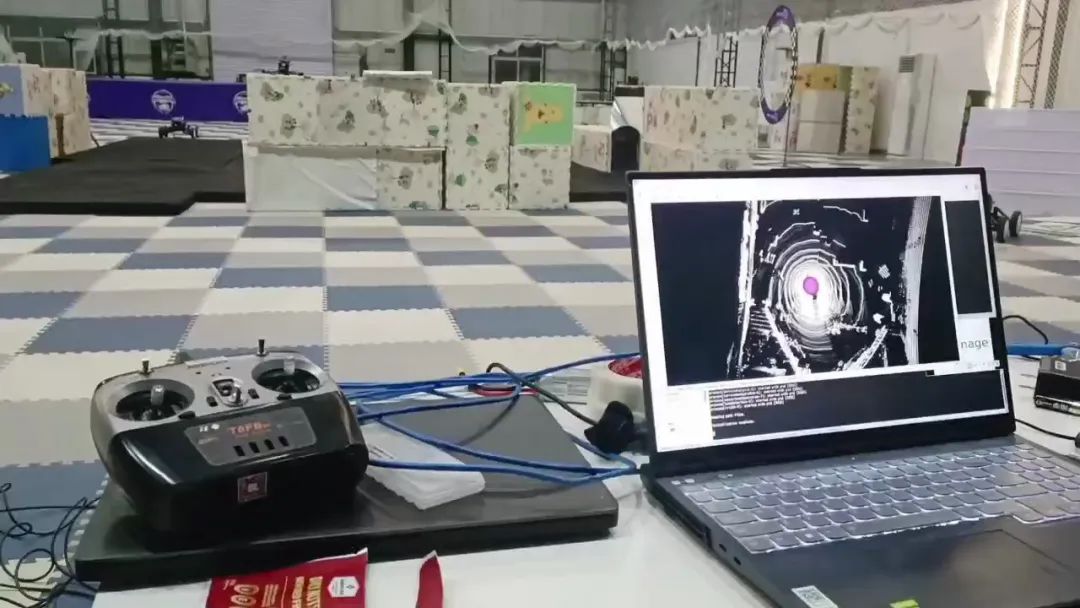
随后,进入决赛的四支队伍有序开始比赛。四支队伍来自清华、北大、北信科等高校,选手们利用视觉定位控制无人机顺利完成穿越圆环、识别货物等环节,最终满分完成任务,赢得了现场观众和嘉宾的阵阵掌声。

活动现场
比赛过后,电子系助理研究员余金城进行了无人平台云测试场展示推介。余金城详细阐述了云测试场中的关键技术,包括基于动态捕捉定位系统的数字孪生、远程验证云平台以及无人车的自主避障等。该平台目前已经支持清华大学多个科研项目和实践课程。在现场为观众展示了云测试场远程监控的功能和自主导航的开发实例后,余金城表示,智能无人系统作为交叉学科,需要算法、电路、通信等多个学科协同发展,也是电子系的重要学科发展方向。希望能够依托无人系统测试场,建设共性科研平台,并持续完善课程和赛事建设,为科研机构提供基础设施,为行业企业提供关键技术,为大众提供科普平台。也非常期待各界人士共同参与、共同建设,一道促进智能无人系统的发展。

余金城讲话
现场进行无人车自主导航演示
沙河高教园区开发建设有限责任公司总经理助理赵艺婉现场推介了未来科学城、沙河高教园的建设发展情况及资源优势。沙河高教园区是北京市为落实科教兴国战略、推动首都高等教育在新世纪可持续发展的重大战略部署,是“两谷一园”创新发展格局的重要组成部分之一。目前,园区入驻多所高校及国家和省部级重点实验室,创新资源不断汇聚。希望未来能不断加强与高校和企业的合作,共同打造环高教园区科技创新圈。
最后,未来城管委会校城融合处处长熊玉川做总结发言,对比赛的成功举办表示祝贺,对参赛队伍的表现给予了高度评价。她希望各个平台利用政府的支持和资金,按照所规划的科学项目,向清华大学和上海交大等团队学习,努力打造更好的高校园区。在校企合作方面,熊玉川处长强调企业应增加科研经费投入到高校,提倡采用校企共建实验室的方法实现校企协同创新。同时,她希望以此次智能无人机邀请赛为起点,将昌平区的发展融入到清华北大等高校以及未来科技城的发展中,与学校企业各方携手并肩,为昌平区、北京市以及全社会提供更好的服务。

熊玉川讲话

参会人员合影

关于《智能无人机技术设计实践》课程
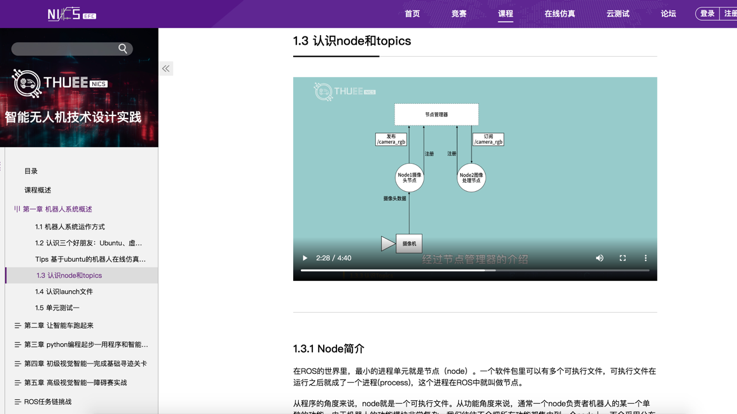
和在线教学课程平台
《智能无人机技术设计实践》课程由清华大学电子工程系协同智能研究中心支持,以智能无人机作为载体,通过通用理论和特定实例相结合的方式教学,让学生掌握无人机开发的技能,并在实践中编写程序,完成无人机起飞,避障,路径规划、图像识别与决策等多项任务。本课程涉及ROS基础知识、Python编程、仿真环境开发、实机开发、系统集成等内容,锻炼学生软硬件协同编程的能力,让学生在综合运用所学知识解决实际问题的同时能够最大程度发挥想象力。
该课程是清华大学电子工程系实现全课程教师在线授课及学生在线开发的一门创新课程。自2019年开设以来,在教学实践过程中持续采用清华大学电子工程系在本科生课程中推广的“赛课结合”新型教学模式,并配套实践竞赛“智能无人机挑战赛”。该比赛属于清华大学三星级赛事,旨在通过课内课程与课外活动有机融合,培养学生学术科研兴趣和动手实践能力。课程中的无人机互动环节是清华大学“挑战杯”学生课外学术科技作品展的体验项目,并曾在清华附中、中关村一小进行过活动展示与交流。

目前,无人机课程推出在线公开课程平台,努力开拓大众视野,力求做到科技普及与技术革新的相互促进。本课程的全部环节都可以通过无人机在线教学课程平台进行在线学习,任何对无人机课程感兴趣的学生都可以通过访问课程地址链接(http://180.76.171.253:18891/)来获取该课程的全部资讯,并有助教在线答疑解惑。
关于清华大学电子系无人平台
场地规格:超大室内空间,50 * 25 * 12米,超过100台红外动捕相机,支持1200平米的高精度室内定位。
场地设施:FZMotion光学动捕可输出被测物位置、姿态、速度和加速度等信息,位置精度误差小于1mm。

测试场地实拍
测试内容:无人机、移动机器人云技术在线虚拟仿真+真机云测试,包括智能车避障、目标检测、路径规划、智能无人机控制、基于CNN的物体识别、多智能体协同控制、多智能体强化学习等。
平台功能:提供了一套由web端的gazebo、rviz、vscode组成的机器人远程开发环境,通过这一套远程系统能够实现对测试场的机器人资源进行接入、开发、调试、观察,通过将场地中的真实机器人进行3D虚拟场景数字孪生。
云测试场系统示意图
任何对云测试场有了解意愿或使用需求的机构可联系nics-efc@tsinghua.edu.cn获取更多详细资料。