目录
1、前言
2、仿真
3、程序
资料下载地址:基于MSP430F249的电子钟仿真(源码+仿真)
1、前言
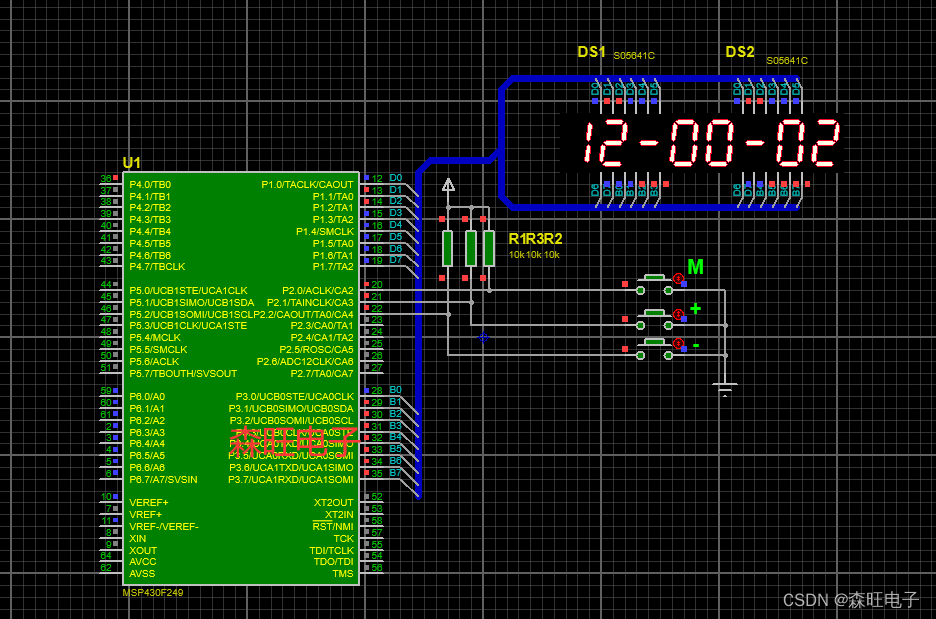
基于MSP430F249的电子钟仿真,数码管显示时分秒,并可以通过按键调节时间。
2、仿真

 3、程序
3、程序
#include <MSP430x24x.h>
#define uchar unsigned char
#define uint unsigned int
uchar const table[]={0x3f,0x06,0x5b,0x4f,0x66,0x6d,0x7d,0x07, //共阴数码管段选码表,无小数点
0x7f,0x6f,0x77,0x7c,0x39,0x5e,0x79,0x71};
struct {
uchar hou;
uchar min;
uchar sec;
}time;
struct {
uchar hou:1;
uchar min:1;
uchar sec:1;
}Flashflag;
uchar Disbuf[8],Index;
uint count1ms,FlashCnt;
uchar Keytimes=0;
void delayms(uint t)
{
uint i;
while(t--)
for(i=1330;i>0;i--);//进过参数的调整
}
void Init_Timer_A(void)
{
CCTL0 = CCIE; // 使能CCR0 中断
TAR=0xFC18; // 计数装入初值
TACTL=TASSEL_2+MC_2+TAIE+ID_3;//设置时钟源和计数模式 采用SMCLK/8 =1Mhz
}
void Refreshtime(void)
{
if(Flashflag.hou)
{
Disbuf[1]=table[time.hou%10];
Disbuf[0]=table[time.hou/10];
}
else
{
Disbuf[1]=0x00;
Disbuf[0]=0x00;
}
if(Flashflag.min)
{
Disbuf[3]=table[time.min/10];
Disbuf[4]=table[time.min%10];
}
else
{
Disbuf[3]=0x00;
Disbuf[4]=0x00;
}
if(Flashflag.sec)
{
Disbuf[6]=table[time.sec/10];
Disbuf[7]=table[time.sec%10];
}
else
{
Disbuf[6]=0x00;
Disbuf[7]=0x00;
}
}
uchar ReadKey(void)
{
static uchar count;
uchar temp;
temp=P2IN&0x07;
if(temp!=0x07)
{
if(++count==10)
{
return temp;
}else if(count>=200)
{
count=180;
return temp;
}else
return 0xFF;
}else
{
count=0;
return 0xFF;
}
}
void KeyProcess(void)
{
uchar temp;
temp=ReadKey();
if(temp!=0xFF)
{
temp=temp^0x07;
if(temp&0x01)
{
if(++Keytimes==4)
{
Keytimes=0;
Flashflag.hou=1;
Flashflag.min=1;
Flashflag.sec=1;
FlashCnt=0;
}
}
if(temp&0x02)
{
if(Keytimes==1)
{
if(++time.hou>=24)
time.hou=0;
}
else if(Keytimes==2)
{
if(++time.min>=60)
time.min=0;
}
else if(Keytimes==3)
{
if(++time.sec>=60)
time.sec=0;
}
}
if(temp&0x04)
{
if(Keytimes==1)
{
if(time.hou--==0)
time.hou=23;
}
else if(Keytimes==2)
{
if(time.min--==0)
time.min=59;
}
else if(Keytimes==3)
{
if(time.sec--==60)
time.sec=59;
}
}
}
}
void main(void)
{
WDTCTL=WDTPW + WDTHOLD; // 关闭看门狗
P4DIR=0x01;
P1DIR=0xFF; // 设置方向
P1SEL=0; // 设置为普通I/O 口
P3DIR=0xFF; // 设置方向
P3SEL=0; // 设置为普通I/O 口
P1OUT=0x00;
P3OUT=0xFF;
P2DIR=0x0;
P2OUT=0x07;
P2SEL=0x00;
time.hou=12;
Flashflag.hou=1;
Flashflag.min=1;
Flashflag.sec=1;
Disbuf[2]=0x40;
Disbuf[5]=0x40;
Refreshtime();
Init_Timer_A();
_BIS_SR(LPM0_bits+ GIE);//进入低功耗睡眠模式
while(1)
{
P3OUT=0xFF;
if(++Index==8) Index=0;
delayms(1);
}
}
#pragma vector=TIMERA0_VECTOR //定时器A 中断服务程序
__interrupt void Timer_a(void)
{
switch(TAIV) //TAIV 表示中断向量号
{
case 2:break;
case 4:break;
case 10: //TAIV=10 表示中断计数器溢出中断
TAR=0xFC18;// (65536-1000)
P4OUT=P4OUT^0x01;
if(++count1ms==220)
{
time.sec++;
count1ms=0;
if(time.sec>=60)
{
time.sec=0;
time.min++;
if(time.min>=60)
{
time.min=0;
if(++time.hou>=24)
time.hou=0;
}
}
}
if(Keytimes)
{
if(++FlashCnt>=80)
{
if(Keytimes==1)
{
Flashflag.hou=!Flashflag.hou;
Flashflag.min=1;
Flashflag.sec=1;
}
else if(Keytimes==2)
{
Flashflag.min=!Flashflag.min;
Flashflag.hou=1;
Flashflag.sec=1;
}
else if(Keytimes==3)
{
Flashflag.sec=!Flashflag.sec;
Flashflag.hou=1;
Flashflag.min=1;
}
FlashCnt=0;
}
}
KeyProcess();
Refreshtime();
//TACCR0=0xF000;
break;
}
LPM0_EXIT;
}




![[蓝桥杯2024]-PWN:fd解析(命令符转义,标准输出重定向)](https://img-blog.csdnimg.cn/direct/fe37ee3eed4841558d05d5ad0f674fc9.png)