一 多进程版TCP服务器
1.1 核心功能
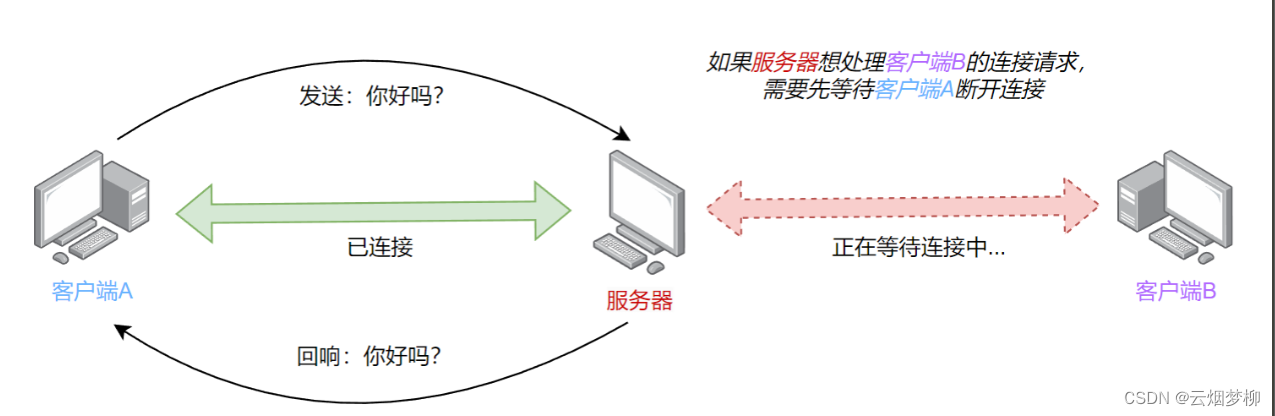
对于之前编写的 字符串回响程序 来说,如果只有一个客户端进行连接并通信,是没有问题的,但如果有多个客户端发起连接请求,并尝试进行通信,服务器是无法应对的
原因在于 服务器是一个单进程版本,处理连接请求 和 业务处理 是串行化执行的,如果想处理下一个连接请求,需要把当前的业务处理完成。
 具体表现为下面这种情况:
具体表现为下面这种情况:

为什么客户端B会显示当前已经连接成功?
这是因为是客户端是主动发起连接请求的一方,在请求发出后,如果出现连接错误,客户端就认为已经连接成功了,但实际上服务器还没有处理这个连接请求.
这显然是服务器的问题,处理连接请求 与 业务处理 应该交给两个不同的执行流完成,可以使用多进程或者多线程解决,这里先采用多进程的方案
所以当前需要实现的网络程序核心功能为:当服务器成功处理连接请求后,fork 新建一个子进程,用于进行业务处理,原来的进程专注于处理连接请求。
1.2 创建子进程
注:当前的版本的修改只涉及 StartServer() 函数
创建子进程使用 fork() 函数,它的返回值含义如下
ret == 0表示创建子进程成功,接下来执行子进程的代码ret > 0表示创建子进程成功,接下来执行父进程的代码ret < 0表示创建子进程失败
子进程创建成功后,会继承父进程的文件描述符表,能轻而易举的获取客户端的 socket 套接字,从而进行网络通信
当然不止文件描述符表,得益于 写时拷贝 机制,子进程还会共享父进程的变量,当发生修改行为时,才会自己创建。
注意: 当子进程取走客户端的 socket 套接字进行通信后,父进程需要将其关闭(因为它不需要了),避免文件描述符泄漏
StartServer()服务器启动函数 — 位于server.hpp的TcpServer类
// 进程创建、等待所需要的头文件
#include <unistd.h>
#include <sys/wait.h>
#include <sys/types.h>
//启动服务器
void StartServer(){
// 忽略 SIGCHLD 信号
//signal(SIGCHLD, SIG_IGN);
while(!_quit){
//1 处理连接请求
struct sockaddr_in client;
socklen_t len = sizeof(client);
int sock = accept(_listensock,(struct sockaddr*)&client,&len);
//2 如果连接失败 继续尝试连接
if(sock == -1){
std::cerr<< "Accept Fail!:"<<strerror(errno)<<std::endl;
continue;
}
// 连接成功,获取客户端信息
std::string clientip = inet_ntoa(client.sin_addr);
uint16_t clientport = ntohs(client.sin_port);
std::cout<<"Server accept"<<clientip + "-"<<clientport<<sock<<" from "<<_listensock << "success!"<<std::endl;
//3 创建子进程
pid_t id=fork();
if(id<0){
// 创建子进程失败,暂时不与当前客户端建立通信会话
close(sock);
std::cerr<<"Fork Fail!"<<std::endl;
}
else if( 0 == id){
//进入子进程
// 子进程拥有父进程相同的文件描述符,建议把不用的关闭
close(_listensock);
// 执行业务处理函数
//4 这里因为是字节流传递,一般而言我们会自己写一个函数
Service(sock,clientip,clientport);
exit(0);
}
else {
// 父进程需要等待子进程
pid_t ret = waitpid(id, nullptr, 0); // 默认为阻塞式等待
//更改为非阻塞
// pid_t ret = waitpid(id,nullptr,WNOHANG);
if(ret == id){
std::cout << "Wait " << id << " success!";
}
}
}
}虽然此时成功创建了子进程,但父进程(处理连接请求)仍然需要等待子进程退出后,才能继续运行,而不能和我们想象中一样单独进行处理连接请求函数,说白了就是 父进程现在处于阻塞等待状态,需要设置为 非阻塞等待.
1.3 设置非阻塞状态
设置父进程为非阻塞的方式有很多,这里来一一列举
方式一:通过参数设置为非阻塞等待(不推荐)
可以直接给 waitpid() 函数的参数3传递 WNOHANG,表示当前为 非阻塞等待.
pid_t ret = waitpid(id, nullptr, WNOHANG); // 设置为非阻塞式等待 这种方法可行,但不推荐,原因如下:虽然设置成了非阻塞式等待,但父进程终究是需要通过 waitpid() 函数来尝试等待子进程,倘若父进程一直卡在 accept() 函数处,会导致子进程退出后暂时无人收尸,进而导致资源泄漏。
方式二:忽略 SIGCHLD 信号(推荐使用)
这是一个子进程在结束后发出的信号,默认动作是什么都不做;父进程需要检测并回收子进程,我们可以直接忽略该信号,这里的忽略是个特例,只是父进程不对其进行处理,转而由 操作系统 对其负责,自动清理资源并进行回收,不会产生 僵尸进程。
//启动服务器
void StartServer(){
// 忽略 SIGCHLD 信号
signal(SIGCHLD, SIG_IGN);
while(!_quit){
//1 处理连接请求
struct sockaddr_in client;
socklen_t len = sizeof(client);
int sock = accept(_listensock,(struct sockaddr*)&client,&len);
//2 如果连接失败 继续尝试连接
if(sock == -1){
std::cerr<< "Accept Fail!:"<<strerror(errno)<<std::endl;
continue;
}
// 连接成功,获取客户端信息
std::string clientip = inet_ntoa(client.sin_addr);
uint16_t clientport = ntohs(client.sin_port);
std::cout<<"Server accept"<<clientip + "-"<<clientport<<sock<<" from "<<_listensock << "success!"<<std::endl;
//3 创建子进程
pid_t id=fork();
if(id<0){
// 创建子进程失败,暂时不与当前客户端建立通信会话
close(sock);
std::cerr<<"Fork Fail!"<<std::endl;
}
else if( 0 == id){
//进入子进程
// 子进程拥有父进程相同的文件描述符,建议把不用的关闭
close(_listensock);
// 执行业务处理函数
//4 这里因为是字节流传递,一般而言我们会自己写一个函数
Service(sock,clientip,clientport);
exit(0);
}
// else {
// // 父进程需要等待子进程
// //pid_t ret = waitpid(id, nullptr, 0); // 默认为阻塞式等待
// //更改为非阻塞
// pid_t ret = waitpid(id,nullptr,WNOHANG);
// if(ret == id){
// std::cout << "Wait " << id << " success!";
// }
// }
}
}强烈推荐使用该方案,因为操作简单,并且没有后患之忧。
方式三:设置 SIGCHLD 信号的处理动作为子进程回收(不是很推荐)
当子进程退出并发送该信号时,执行父进程回收子进程的操作。
设置 SIGCHLD 信号的处理动作为 回收子进程后,父进程同样不必再考虑回收子进程的问题
注意: 因为现在处于 TcpServer 类中,handler() 函数需要设置为静态(避免隐含的 this 指针),避免不符合 signal() 函数中信号处理函数的参数要求。
// 需要设置为静态
static void handler(int signo){
printf("进程 %d 捕捉到了 %d 号信号\n", getpid(), signo);
// 这里的 -1 表示父进程等待时,只要是已经退出了的子进程,都可以进行回收
while (1){
pid_t ret = waitpid(-1, NULL, WNOHANG);
if (ret > 0)
printf("父进程: %d 已经成功回收了 %d 号进程\n", getpid(), ret);
else
break;
}
printf("子进程回收成功\n");
}
//启动服务器
void StartServer(){
// 设置 SIGCHLD 信号的处理动作
signal(SIGCHLD, handler);
// 忽略 SIGCHLD 信号
// signal(SIGCHLD, SIG_IGN);
while(!_quit){
//1 处理连接请求
struct sockaddr_in client;
socklen_t len = sizeof(client);
int sock = accept(_listensock,(struct sockaddr*)&client,&len);
//2 如果连接失败 继续尝试连接
if(sock == -1){
std::cerr<< "Accept Fail!:"<<strerror(errno)<<std::endl;
continue;
}
// 连接成功,获取客户端信息
std::string clientip = inet_ntoa(client.sin_addr);
uint16_t clientport = ntohs(client.sin_port);
std::cout<<"Server accept"<<clientip + "-"<<clientport<<sock<<" from "<<_listensock << "success!"<<std::endl;
//3 创建子进程
pid_t id=fork();
if(id<0){
// 创建子进程失败,暂时不与当前客户端建立通信会话
close(sock);
std::cerr<<"Fork Fail!"<<std::endl;
}
else if( 0 == id){
//进入子进程
// 子进程拥有父进程相同的文件描述符,建议把不用的关闭
close(_listensock);
// 执行业务处理函数
//4 这里因为是字节流传递,一般而言我们会自己写一个函数
Service(sock,clientip,clientport);
exit(0);
}
else {
// 父进程需要等待子进程
pid_t ret = waitpid(id, nullptr, 0); // 默认为阻塞式等待
//更改为非阻塞
// pid_t ret = waitpid(id,nullptr,WNOHANG);
if(ret == id){
std::cout << "Wait " << id << " success!";
}
}
}
}为什么不是很推荐这种方法?因为这种方法实现起来比较麻烦,不如直接忽略 SIGCHLD 信号
方式四:设置孙子进程(不是很推荐)
众所周知,父进程只需要对子进程负责,至于孙子进程交给子进程负责,如果某个子进程的父进程终止运行了,那么它就会变成 孤儿进程,父进程会变成 1 号进程,也就是由操作系统领养,回收进程的重担也交给了操作系统
可以利用该特性,在子进程内部再创建一个子进程(孙子进程),然后子进程退出,父进程可以直接回收(不必阻塞),子进程(孙子进程)的父进程变成 1 号进程
这种实现方法比较巧妙,而且与我们后面即将学到的 守护进程 有关
注意: 使用这种方式时,父进程是需要等待子进程退出的。
这种方法代码也很简单,我们也不再做过多示例,但依旧不推荐,因为倘若连接请求变多,会导致孤儿进程变多,孤儿进程由操作系统接管,数量变多会给操作系统带来负担
以上就是设置 非阻塞 的四种方式,推荐使用方式二:忽略 SIGCHLD 信号。
至此我们的 字符串回响程序 可以支持多客户端了。

细节补充:当子进程取走 sock 套接字进行网络通信后,父进程就不需要使用 sock 套接字了,可以将其进行关闭,下次连接时继续使用,避免文件描述符不断增长。
StartServer()服务器启动函数 — 位于server.hpp服务器头文件中的TcpServer类
// 启动服务器
void StartServer()
{
// 忽略 SIGCHLD 信号
signal(SIGCHLD, SIG_IGN);
while (!_quit)
{
// 1.处理连接请求
// ...
// 2.如果连接失败,继续尝试连接
// ...
// 连接成功,获取客户端信息
// ...
// 3.创建子进程
// ...
close(sock); // 父进程不再需要资源(建议关闭)
}
} 这个补丁可以减少资源消耗,建议加上,前面是忘记加了,并且不太好修改,server.hpp 服务器头文件完整代码如下:
// server.hpp
#pragma once
#include <signal.h>
#include<iostream>
#include<string>
#include<functional>
#include<sys/types.h>
#include<sys/socket.h>
#include<netinet/in.h>
#include<arpa/inet.h>
#include"err.hpp"
#include<cstring>
#include<unistd.h>
#include<cerrno>
#include <sys/types.h>
#include <sys/wait.h>
namespace My_server{
// 默认端口号
const uint16_t default_port = 8088;
//全连接队列的最大长度
const int backlog = 32;
using func_t =std::function<std::string(std::string)>;
class server
{
private:
/* data */
//套接字
int _listensock;
//端口号
uint16_t _port;
// 判断服务器是否结束运行
bool _quit;
// 外部传入的回调函数
func_t _func;
public:
server(const func_t &func,const uint16_t &port = default_port)
:_func(func)
,_port(port)
,_quit(false)
{}
~server(){}
//初始化服务器
void InitServer(){
//1 创建套接字
_listensock = socket(AF_INET,SOCK_STREAM,0);
if(_listensock == -1){
//绑定失败
std::cerr<<"Create Socket Fail:"<<strerror(errno)<<std::endl;
exit(SOCKET_ERR);
}
std::cout<<"Create Socket Success!" <<_listensock<<std::endl;
//2 绑定端口号和IP地址
struct sockaddr_in local;
bzero(&local,sizeof(local));
local.sin_family = AF_INET;
local.sin_port = htons(_port);
local.sin_addr.s_addr = INADDR_ANY;
if(bind(_listensock,(const sockaddr*)&local,sizeof(local))){
std::cerr << "Bind IP&&Port Fali" << strerror(errno) << std::endl;
exit(BIND_ERR);
}
//3 开始监听
if(listen(_listensock,backlog)== -1){
std::cerr<<"Listen Fail: "<< strerror(errno) << std::endl;
//新增一个报错
exit(LISTEN_ERR);
}
std::cout<<"Listen Success!"<<std::endl;
}
// // 需要设置为静态
// static void handler(int signo){
// printf("进程 %d 捕捉到了 %d 号信号\n", getpid(), signo);
// // 这里的 -1 表示父进程等待时,只要是已经退出了的子进程,都可以进行回收
// while (1){
// pid_t ret = waitpid(-1, NULL, WNOHANG);
// if (ret > 0)
// printf("父进程: %d 已经成功回收了 %d 号进程\n", getpid(), ret);
// else
// break;
// }
// printf("子进程回收成功\n");
// }
//启动服务器
void StartServer(){
// 设置 SIGCHLD 信号的处理动作
//signal(SIGCHLD, handler);
// 忽略 SIGCHLD 信号
signal(SIGCHLD, SIG_IGN);
while(!_quit){
//1 处理连接请求
struct sockaddr_in client;
socklen_t len = sizeof(client);
int sock = accept(_listensock,(struct sockaddr*)&client,&len);
//2 如果连接失败 继续尝试连接
if(sock == -1){
std::cerr<< "Accept Fail!:"<<strerror(errno)<<std::endl;
continue;
}
// 连接成功,获取客户端信息
std::string clientip = inet_ntoa(client.sin_addr);
uint16_t clientport = ntohs(client.sin_port);
std::cout<<"Server accept"<<clientip + "-"<<clientport<<sock<<" from "<<_listensock << "success!"<<std::endl;
//3 创建子进程
pid_t id=fork();
if(id<0){
// 创建子进程失败,暂时不与当前客户端建立通信会话
close(sock);
std::cerr<<"Fork Fail!"<<std::endl;
}
else if( 0 == id){
//进入子进程
// 子进程拥有父进程相同的文件描述符,建议把不用的关闭
close(_listensock);
// 执行业务处理函数
//4 这里因为是字节流传递,一般而言我们会自己写一个函数
Service(sock,clientip,clientport);
exit(0);
}
// else {
// // 父进程需要等待子进程
// pid_t ret = waitpid(id, nullptr, 0); // 默认为阻塞式等待
// //更改为非阻塞
// // pid_t ret = waitpid(id,nullptr,WNOHANG);
// if(ret == id){
// std::cout << "Wait " << id << " success!";
// }
// }
close(sock); // 父进程不再需要资源(建议关闭)
}
}
void Service(int sock,std::string &clientip,const uint16_t &clientport){
char buff[1024];
std::string who = clientip + "-" + std::to_string(clientport);
while(true){
// 以字符串格式读取,预留\0的位置
ssize_t n = read(sock,buff,sizeof(buff)-1);
if(n>0){
//读取成功
buff[n]='\0';
std::cout<<"Server get: "<< buff <<" from "<<who<<std::endl;
//实际处理可以交给上层逻辑指定
std::string respond = _func(buff);
write(sock,buff,strlen(buff));
}
else if(n==0){
//表示当前读到了文件末尾,结束读取
std::cout<<"Client "<<who<<" "<<sock<<" quit!"<<std::endl;
close(sock);
break;
}
else{
// 读取出问题(暂时)
std::cerr << "Read Fail!" << strerror(errno) << std::endl;
close(sock); // 关闭文件描述符
break;
}
}
}
};
}
二 多线程版服务器
2.1 核心功能
通过多线程,实现支持多客户端同时通信的服务器
核心功能:服务器与客户端成功连接后,创建一个线程,服务于客户端的业务处理
 '这里先通过 原生线程库 模拟实现.
'这里先通过 原生线程库 模拟实现.
2.2 使用原生线程库
线程的回调函数中需要 Service() 业务处理函数中的所有参数,同时也需要具备访问 Service() 业务处理函数的能力,单凭一个 void* 的参数是无法解决的,为此可以创建一个类,里面可以包含我们所需要的参数。
ThreadData类 — 位于server.hpp服务器头文件中。
//包含我们所需参数的类型
class ThreadData{
public:
ThreadData(int sock,const std::string&ip,const uint16_t&port,server*ptr)
:_sock(sock)
,_clientip(ip)
,_clientport(port)
,_current(ptr)
{}
public:
int _sock;
std::string _clientip;
uint16_t _clientport;
server* _current;
};接下来就可以考虑如何借助多线程了
线程创建后,需要关闭不必要的
socket套接字吗?
- 不需要,线程之间是可以共享这些资源的,无需关闭
如何设置主线程不必等待次线程退出?
- 可以把次线程进行分离
所以接下来我们需要在连接成功后,创建次线程,利用已有信息构建 ThreadData 对象,为次线程编写回调函数(最终目的是为了执行 Service() 业务处理函数)
注意: 因为当前在类中,线程的回调函数需要使用 static 设置为静态函数。
server.hpp服务器头文件
// server.hpp
#pragma once
#include<iostream>
#include<string>
#include<functional>
#include<sys/types.h>
#include<sys/socket.h>
#include<netinet/in.h>
#include<arpa/inet.h>
#include"err.hpp"
#include<cstring>
#include<unistd.h>
#include<cerrno>
namespace My_server{
// 默认端口号
const uint16_t default_port = 8088;
//全连接队列的最大长度
const int backlog = 32;
using func_t = std::function<std::string(std::string)>;
//前置声明
class server;
//包含我们所需参数的类型
class ThreadData{
public:
ThreadData(int sock,const std::string&ip,const uint16_t&port,server*ptr)
:_sock(sock)
,_clientip(ip)
,_clientport(port)
,_current(ptr)
{}
public:
int _sock;
std::string _clientip;
uint16_t _clientport;
server* _current;
};
class server
{
private:
/* data */
//套接字
int _listensock;
//端口号
uint16_t _port;
// 判断服务器是否结束运行
bool _quit;
// 外部传入的回调函数
func_t _func;
public:
server(const func_t &func,const uint16_t &port = default_port)
:_func(func)
,_port(port)
,_quit(false)
{}
~server(){}
//初始化服务器
void InitServer(){
//1 创建套接字
_listensock = socket(AF_INET,SOCK_STREAM,0);
if(_listensock == -1){
//绑定失败
std::cerr<<"Create Socket Fail:"<<strerror(errno)<<std::endl;
exit(SOCKET_ERR);
}
std::cout<<"Create Socket Success!" <<_listensock<<std::endl;
//2 绑定端口号和IP地址
struct sockaddr_in local;
bzero(&local,sizeof(local));
local.sin_family = AF_INET;
local.sin_port = htons(_port);
local.sin_addr.s_addr = INADDR_ANY;
if(bind(_listensock,(const sockaddr*)&local,sizeof(local))){
std::cerr << "Bind IP&&Port Fali" << strerror(errno) << std::endl;
exit(BIND_ERR);
}
//3 开始监听
if(listen(_listensock,backlog)== -1){
std::cerr<<"Listen Fail: "<< strerror(errno) << std::endl;
//新增一个报错
exit(LISTEN_ERR);
}
std::cout<<"Listen Success!"<<std::endl;
}
//启动服务器
void StartServer(){
while(!_quit){
//1 处理连接请求
struct sockaddr_in client;
socklen_t len = sizeof(client);
int sock = accept(_listensock,(struct sockaddr*)&client,&len);
//2 如果连接失败 继续尝试连接
if(sock == -1){
std::cerr<< "Accept Fail!:"<<strerror(errno)<<std::endl;
continue;
}
// 连接成功,获取客户端信息
std::string clientip = inet_ntoa(client.sin_addr);
uint16_t clientport = ntohs(client.sin_port);
std::cout<<"Server accept"<< clientip + "-"<< clientport <<sock<<" from "<<_listensock << "success!"<<std::endl;
// 3.创建线程及所需要的线程信息类
ThreadData* td = new ThreadData(sock, clientip, clientport, this);
pthread_t p;
pthread_create(&p, nullptr, Routine, td);
}
}
// 线程回调函数
static void* Routine(void* args){
// 线程分离
pthread_detach(pthread_self());
ThreadData* td = static_cast<ThreadData*>(args);
// 调用业务处理函数
td->_current->Service(td->_sock, td->_clientip, td->_clientport);
// 销毁对象
delete td;
return nullptr;
}
void Service(int sock,std::string &clientip,const uint16_t &clientport){
char buff[1024];
std::string who = clientip + "-" + std::to_string(clientport);
while(true){
// 以字符串格式读取,预留\0的位置
ssize_t n = read(sock,buff,sizeof(buff)-1);
if(n>0){
//读取成功
buff[n]='\0';
std::cout<<"Server get: "<< buff <<" from "<<who<<std::endl;
//实际处理可以交给上层逻辑指定
std::string respond = _func(buff);
write(sock,buff,strlen(buff));
}
else if(n==0){
//表示当前读到了文件末尾,结束读取
std::cout<<"Client "<<who<<" "<<sock<<" quit!"<<std::endl;
close(sock);
break;
}
else{
// 读取出问题(暂时)
std::cerr << "Read Fail!" << strerror(errno) << std::endl;
close(sock); // 关闭文件描述符
break;
}
}
}
};
}因为当前使用了 原生线程库,所以在编译时,需要加上 -lpthread
Makefile文件
.PHONY:all
all:server client
server:server.cc
g++ -o $@ $^ -std=c++11 -lpthread
client:client.cc
g++ -o $@ $^ -std=c++11 -lpthread
.PHONY:clean
clean:
rm -rf server client使用 原生线程库 过于单薄了,并且这种方式存在问题:连接都准备好了,才创建线程,如果创建线程所需要的资源较多,会拖慢服务器整体连接效率
为此可以改用之前实现的 线程池
三 线程池版服务器
3.1 ThreadPool.hpp 线程池头文件
#pragma once
#include <vector>
#include <string>
#include <memory>
#include <functional>
#include <unistd.h>
#include <pthread.h>
#include "Task.hpp"
#include "Thread.hpp"
#include "BlockingQueue.hpp" // CP模型
namespace My_pool{
const int THREAD_NUM = 10;
template<class T>
class ThreadPool
{
private:
ThreadPool(int num = THREAD_NUM)
:_num(num)
{}
~ThreadPool(){
// 等待线程退出
for(auto &t : _threads)
t.join();
}
// 删除拷贝构造
ThreadPool(const ThreadPool<T> &) = delete;
public:
static ThreadPool<T>* getInstance(){
// 双检查
if(_inst == nullptr){
// 加锁
LockGuard lock(&_mtx);
if(_inst == nullptr){
// 创建对象
_inst = new ThreadPool<T>();
// 初始化及启动服务
_inst->init();
_inst->start();
}
}
return _inst;
}
public:
void init(){
// 创建一批线程
for(int i = 0; i < _num; i++)
_threads.push_back(Thread(i, threadRoutine, this));
}
void start(){
// 启动线程
for(auto &t : _threads)
t.run();
}
// 提供给线程的回调函数(已修改返回类型为 void)
static void threadRoutine(void *args){
// 避免等待线程,直接剥离
pthread_detach(pthread_self());
auto ptr = static_cast<ThreadPool<T>*>(args);
while (true){
// 从CP模型中获取任务
T task = ptr->popTask();
task(); // 回调函数
}
}
// 装载任务
void pushTask(const T& task){
_blockqueue.Push(task);
}
protected:
T popTask(){
T task;
_blockqueue.Pop(&task);
return task;
}
private:
std::vector<Thread> _threads;
int _num; // 线程数量
My_Queue::BlockingQueue<T> _blockqueue; // 阻塞队列
// 创建静态单例对象指针及互斥锁
static ThreadPool<T> *_inst;
static pthread_mutex_t _mtx;
};
// 初始化指针
template<class T>
ThreadPool<T>* ThreadPool<T>::_inst = nullptr;
// 初始化互斥锁
template<class T>
pthread_mutex_t ThreadPool<T>::_mtx = PTHREAD_MUTEX_INITIALIZER;
}
3.2 Thread.hpp 封装实现的线程库头文件
#pragma once
#include<iostream>
#include<pthread.h>
#include<string>
//代表线程状态
enum class Status{
NEW = 0,
RUNNING ,
EXIT
};
// 参数。返回值为void* 返回值的函数类型
typedef void (*func_t)(void*);
class Thread
{
private:
pthread_t _tid; // 线程 ID
std::string _name; // 线程名
Status _status; // 线程状态
func_t _func; // 线程回调函数
void* _args; // 传递给回调函数的参数
public:
Thread(int num=0,func_t func = nullptr,void *args = nullptr)
:_tid(num)
,_func(func)
,_status(Status::NEW)
,_args(args)
{
char name[1024];
snprintf(name,sizeof(name),"thread - %d",num);
_name = name;
}
~Thread(){}
//获取线程名
std::string getName() const{
return _name;
}
// 获取状态
Status getStatus() const{
return _status;
}
// 回调方法
static void* runHelper(void *args){
Thread * myThis = static_cast<Thread*>(args);
myThis->_func(myThis->_args);
return nullptr;
}
//启动线程
void run(){
int ret = pthread_create(&_tid,nullptr,runHelper,this);
if(0 != ret){
std::cerr << "Thread create fail!"<<std::endl;
exit(1);
}
_status = Status::RUNNING;
}
// 线程等待
void join(){
int ret = pthread_join(_tid,nullptr);
if(0 != ret){
if(0 != ret){
std::cerr << "Thread join fail!"<<std::endl;
exit(1);
}
}
_status = Status::EXIT;
}
};
3.3 BlockingQueue.hpp 生产者消费者模型头文件
#pragma once
#include <queue>
#include <mutex>
#include <pthread.h>
#include "LockGuard.hpp"
namespace My_Queue{
const int DEF_SIZE = 10;
template<class T>
class BlockingQueue
{
private:
// 任务队列
std::queue<T> _queue;
size_t _cap; // 阻塞队列的容量
pthread_mutex_t _mtx; // 互斥锁
pthread_cond_t _pro_cond; // 生产者条件变量
pthread_cond_t _con_cond; // 消费者条件变量
public:
BlockingQueue(size_t cap = DEF_SIZE)
:_cap(cap)
{
// 初始化锁与条件变量
pthread_mutex_init(&_mtx,nullptr);
pthread_cond_init(&_pro_cond,nullptr);
pthread_cond_init(&_con_cond,nullptr);
}
~BlockingQueue(){
//销毁锁与条件变量
pthread_mutex_destroy(&_mtx);
pthread_cond_destroy(&_pro_cond);
pthread_cond_destroy(&_con_cond);
}
// 生产数据(入队)
void Push(const T& inData){
// 加锁(RAII风格)
LockGuard lock(&_mtx);
// 循环判断条件是否满足
while(IsFull()){
pthread_cond_wait(&_pro_cond, &_mtx);
}
_queue.push(inData);
// 可以加策略唤醒,比如生产一半才唤醒消费者
pthread_cond_signal(&_con_cond);
// 自动解锁
}
// 消费数据(出队)
void Pop(T* outData){
// 加锁(RAII 风格)
LockGuard lock(&_mtx);
// 循环判读条件是否满足
while(IsEmpty()) {
pthread_cond_wait(&_con_cond, &_mtx);
}
*outData = _queue.front();
_queue.pop();
// 可以加策略唤醒,比如消费完后才唤醒生产者
pthread_cond_signal(&_pro_cond);
// 自动解锁
}
private:
//判断是否为满
bool IsFull(){
return _queue.size() == _cap;
}
//判断是否为空
bool IsEmpty(){
return _queue.empty();
}
};
}3.4 LockGuard.hpp 自动化锁头文件
#pragma once
#include<pthread.h>
class LockGuard
{
private:
pthread_mutex_t* _pmtx;
public:
LockGuard(pthread_mutex_t *pmtx)
:_pmtx(pmtx)
{
//加锁
pthread_mutex_lock(_pmtx);
}
~LockGuard(){
//解锁
pthread_mutex_unlock(_pmtx);
}
};
3.5 Task.hpp 任务类
现在需要修改 Task.hpp 任务头文件中的 Task 任务类,将其修改为一个服务于 网络通信中业务处理 的任务类(也就是 Service() 业务处理函数)
在 Service() 业务处理函数中,需要包含 socket 套接字、客户端 IP、客户端端口号 等必备信息,除此之外,我们还可以将 可调用对象(Service() 业务处理函数) 作为参数传递给 Task 对象.
#pragma once
#include <string>
#include <functional>
namespace My_task{
// Service() 业务处理函数的类型
using cb_t = std::function<void(int, std::string, uint16_t)>;
class Task{
public:
// 可以再提供一个默认构造(防止部分场景中构建对象失败)
Task()
{}
Task(int sock, const std::string& ip, const uint16_t& port, const cb_t& cb)
:_sock(sock)
,_ip(ip)
,_port(port)
,_cb(cb)
{}
// 重载运算操作,用于回调 [业务处理函数]
void operator()(){
// 直接回调 cb [业务处理函数] 即可
_cb(_sock, _ip, _port);
}
private:
int _sock;
std::string _ip;
uint16_t _port;
cb_t _cb; // 回调函数
};
}3.6 server.hpp 头文件
准备工作完成后,接下来就是往 server.hpp 服务器头文件中添加组件了
注意:
- 在构建
Task对象时,需要使用bind绑定类内函数,避免参数不匹配- 当前的线程池是单例模式,在
Task任务对象构建后,通过线程池操作句柄push对象即可
// server.hpp
#pragma once
#include<iostream>
#include<string>
#include<functional>
#include<sys/types.h>
#include<sys/socket.h>
#include<netinet/in.h>
#include<arpa/inet.h>
#include"err.hpp"
#include<cstring>
#include<unistd.h>
#include<cerrno>
#include"ThreadPool.hpp"
#include"Task.hpp"
namespace My_server{
// 默认端口号
const uint16_t default_port = 1111;
//全连接队列的最大长度
const int backlog = 32;
using func_t = std::function<std::string(std::string)>;
//前置声明
class server;
//包含我们所需参数的类型
class ThreadData{
public:
ThreadData(int sock,const std::string&ip,const uint16_t&port,server*ptr)
:_sock(sock)
,_clientip(ip)
,_clientport(port)
,_current(ptr)
{}
public:
int _sock;
std::string _clientip;
uint16_t _clientport;
server* _current;
};
class server
{
private:
/* data */
//套接字
int _listensock;
//端口号
uint16_t _port;
// 判断服务器是否结束运行
bool _quit;
// 外部传入的回调函数
func_t _func;
public:
server(const func_t &func,const uint16_t &port = default_port)
:_func(func)
,_port(port)
,_quit(false)
{}
~server(){}
//初始化服务器
void InitServer(){
//1 创建套接字
_listensock = socket(AF_INET,SOCK_STREAM,0);
if(_listensock == -1){
//绑定失败
std::cerr<<"Create Socket Fail:"<<strerror(errno)<<std::endl;
exit(SOCKET_ERR);
}
std::cout<<"Create Socket Success!" <<_listensock<<std::endl;
//2 绑定端口号和IP地址
struct sockaddr_in local;
bzero(&local,sizeof(local));
local.sin_family = AF_INET;
local.sin_port = htons(_port);
local.sin_addr.s_addr = INADDR_ANY;
if(bind(_listensock,(const sockaddr*)&local,sizeof(local))){
std::cerr << "Bind IP&&Port Fali" << strerror(errno) << std::endl;
exit(BIND_ERR);
}
//3 开始监听
if(listen(_listensock,backlog)== -1){
std::cerr<<"Listen Fail: "<< strerror(errno) << std::endl;
//新增一个报错
exit(LISTEN_ERR);
}
std::cout<<"Listen Success!"<<std::endl;
}
//启动服务器
void StartServer(){
while(!_quit){
//1 处理连接请求
struct sockaddr_in client;
socklen_t len = sizeof(client);
int sock = accept(_listensock,(struct sockaddr*)&client,&len);
//2 如果连接失败 继续尝试连接
if(sock == -1){
std::cerr<< "Accept Fail!:"<<strerror(errno)<<std::endl;
continue;
}
// 连接成功,获取客户端信息
std::string clientip = inet_ntoa(client.sin_addr);
uint16_t clientport = ntohs(client.sin_port);
std::cout<<"Server accept"<< clientip + "-"<< clientport <<sock<<" from "<<_listensock << "success!"<<std::endl;
// 3.构建任务对象 注意:使用 bind 绑定 this 指针
My_task::Task t(sock, clientip, clientport, std::bind(&server::Service, this, std::placeholders::_1, std::placeholders::_2, std::placeholders::_3));
// 4.通过线程池操作句柄,将任务对象 push 进线程池中处理
//s
//std::cout<<std::endl<<"push Task"<<std::endl;
My_pool::ThreadPool<My_task::Task>::getInstance()->pushTask(t);
}
}
void Service(int sock,const std::string &clientip,const uint16_t &clientport){
char buff[1024];
std::string who = clientip + "-" + std::to_string(clientport);
while(true){
// 以字符串格式读取,预留\0的位置
ssize_t n = read(sock,buff,sizeof(buff)-1);
if(n>0){
//读取成功
buff[n]='\0';
std::cout<<"Server get: "<< buff <<" from "<<who<<std::endl;
//实际处理可以交给上层逻辑指定
std::string respond = _func(buff);
write(sock,buff,strlen(buff));
}
else if(n==0){
//表示当前读到了文件末尾,结束读取
std::cout<<"Client "<<who<<" "<<sock<<" quit!"<<std::endl;
close(sock);
break;
}
else{
// 读取出问题(暂时)
std::cerr << "Read Fail!" << strerror(errno) << std::endl;
close(sock); // 关闭文件描述符
break;
}
}
}
};
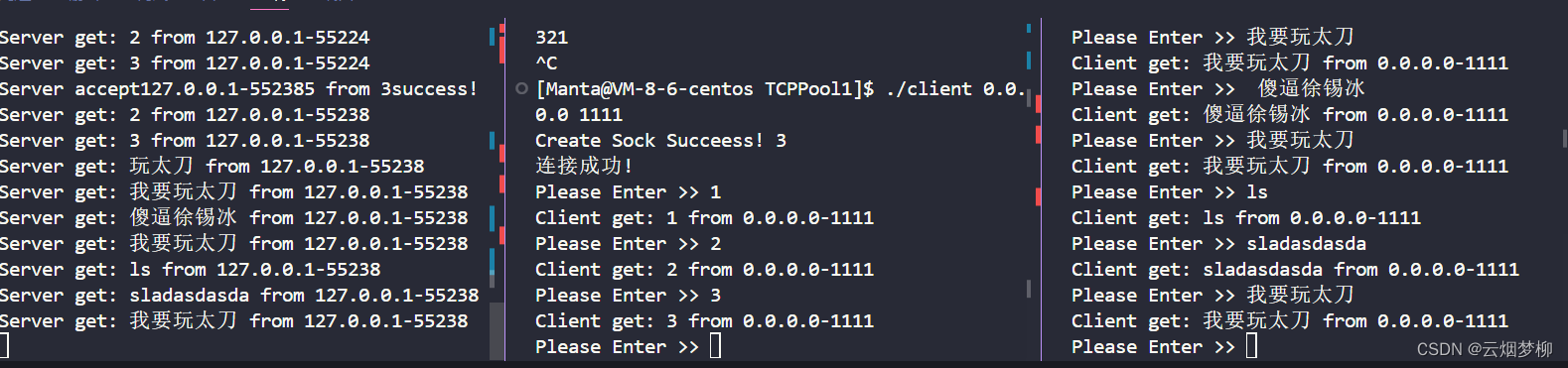
}接下来编译并运行程序,当服务器启动后(此时无客户端连接),只有一个线程,这是因为我们当前的 线程池 是基于 懒汉模式 实现的,只有当第一次使用时,才会创建线程.
接下来启动客户端,可以看到确实创建了一批次线程(十个)
看似程序已经很完善了,其实隐含着一个大问题:当前线程池中的线程,本质上是在回调一个 while(true) 死循环函数,当连接的客户端大于线程池中的最大线程数时,会导致所有线程始终处于满负载状态,直接影响就是连接成功后,无法再创建通信会话(倘若客户端不断开连接,线程池中的线程就无力处理其他客户端的会话)
说白了就是 线程池 比较适合用于处理短任务,对于当前的场景来说,线程池 不适合建立持久通信会话,应该将其用于处理 read 读取、write 写入 任务.
如果想解决这个问题,有两个方向:Service() 函数中支持一次 [收 / 发],或者多线程+线程池,多线程用于构建通信会话,线程池则用于处理 [收 / 发] 任务
前者实现起来比较简单,无非就是把 Service() 业务处理函数中的 while(true) 循环去掉
Service()业务处理函数
void Service(int sock,const std::string &clientip,const uint16_t &clientport){
char buff[1024];
std::string who = clientip + "-" + std::to_string(clientport);
// 以字符串格式读取,预留\0的位置
ssize_t n = read(sock,buff,sizeof(buff)-1);
if(n>0){
//读取成功
buff[n]='\0';
std::cout<<"Server get: "<< buff <<" from "<<who<<std::endl;
//实际处理可以交给上层逻辑指定
std::string respond = _func(buff);
write(sock,buff,strlen(buff));
}
else if(n==0){
//表示当前读到了文件末尾,结束读取
std::cout<<"Client "<<who<<" "<<sock<<" quit!"<<std::endl;
close(sock);
}
else{
// 读取出问题(暂时)
std::cerr << "Read Fail!" << strerror(errno) << std::endl;
close(sock); // 关闭文件描述符
}
}至于后者就比较麻烦了,需要结合 高级IO 相关知识,这里不再阐述