从封装epoll_server到实现reactor服务器(part1)
- 项目复习:从封装epoll_server到实现reactor服务器(part1)
- EPOLL模式服务器初步
- select, poll, epoll的优缺点
- epoll的几个细节
- 封装epoll_server
- 基本框架先写好
- 创建监听套接字和创建epoll模型
- 可以Accept了吗?
- 此时可以调用epoll_wait去让epoll关心这些文件描述符了
- 一些细节
- 进行一次测试
- Accepter和Recver
- epoll服务器最终测试
- 这个epoll服务器没有问题吗?
- 多路转接的工作模式
- 基本概念
- 为什么ET模式一定要是非阻塞的读取才行
仓库:https://github.com/Yufccode/Reactor-based-HyperWebServer/
EPOLL模式服务器初步
select, poll, epoll的优缺点
cite: https://blog.csdn.net/jgm20475/article/details/81083529
Linux中高级IO多路转接中select、poll和epoll的优缺点,这里主要谈select和poll的缺点以及epoll的优点。
一、select的缺点:
- 编写难度大
- 同时处理的文件描述符是有上限的
- 每次需要重新设定fd集合
- 性能会随用户的增多而效率降低
- 输入输出参数在一起
二、poll
poll是对select的一种改良,最突出的改良有两点:
- 文件描述符数量没有上限
- 将输入输出参数进行分离,不用每次设定
那么poll的缺点是:
poll中监听的文件描述符数目增多时:
1、和select一样,poll返回后,需要轮询pollfd来获取就绪的描述符
2、每次调用poll都需要大把大量客户端在一时刻可能只有很少的处于就绪状态,因此随着监视的描述符数量的增长,其效率也会线性下降。
三、epoll的优点:
- 文件描述符数目没有上限:通过epoll_ctl()来注册一个文件描述符,内核中使用红黑树的数据结构来管理所有需要监控的文件描述符。
- 基于事件就绪通知方式:一旦被监听的某个文件描述符就绪,内核会采用类似于callback的回调机制,迅速激活这个文件描述符,这样随着文件描述符数量的增加,也不会影响判定就绪的性能。
- 维护就绪队列:当文件描述符就绪,就会被放到内核中的一个就绪队列中,这样调用epoll_weit获取就绪文件描述符的时候,只要取队列中的元素即可,操作的时间复杂度恒为O(1)。
epoll的几个细节
- 红黑树,是要有key的,文件描述符就是一个天然的key
- 用户只需要设置关系,获取结果即可,不用关心任何对fd或者event对管理细节
- epoll为什么高效呢?-> 红黑树
- 底层只要有fd就绪了,OS会自己给我构建节点,链入到就绪队列中,上层只需要不断地从就绪队列中将数据拿走,就完成了获取就绪事件的任务
- 所以本质上:epoll是一个生产者消费者模型!
- 如果底层没有就绪事件呢?我们的上层应该怎么办?阻塞等待!(可以选择的!所以epoll_wait接口为什么有一个timeout参数,如果我选择不等,就直接返回->非阻塞了)

封装epoll_server
基本框架先写好
基本的东西先写好。
main.cc
#include "epoll_server.hpp"
#include <memory>
int main() {
std::unique_ptr<ns_epoll::epoll_server> svr(new ns_epoll::epoll_server());
svr->start();
return 0;
}
epoll_server.hpp
#ifndef __YUFC_EPOLL_SERVER__
#define __YUFC_EPOLL_SERVER__
namespace ns_epoll {
class epoll_server {
};
} // namespace yufc
#endif
当然,以前写好的log.hpp, sock.hpp都要复制到目录里面。
创建监听套接字和创建epoll模型
这个很简单,直接写就行了,然后创建完监听套接字之后,就是要去创建epoll模型
epoll_server.hpp
epoll_server(const int& port = default_port)
: __port(port) {
// 1. 创建监听套接字
__listen_sock = Sock::Socket();
Sock::Bind(__listen_sock, __port);
Sock::Listen(__listen_sock);
}
因为为了后面方便使用,epoll模型封装一下比较好,封装成epoll.hpp
创建epoll。
epoll.hpp
class __epoll {
public:
static const int gsize = 256;
public:
static int create_epoll() {
int epfd = epoll_create(gsize);
if (epfd > 0)
return epfd;
exit(5);
}
};
epoll_create:
RETURN VALUE
On success, these system calls return a file descriptor (a nonnegative integer). On error, -1 is returned, and errno is
set to indicate the error
所以创建成功返回epfd,创建失败就没得玩了,直接终止。
所以此时继续epoll_server.hpp
epoll_server(const int& port = default_port)
: __port(port) {
// 1. 创建监听套接字
__listen_sock = Sock::Socket();
Sock::Bind(__listen_sock, __port);
Sock::Listen(__listen_sock);
// 2. 创建epoll模型
__epoll_fd = __epoll::create_epoll();
logMessage(DEBUG, "init success, listensock: %d, epfd: %d", __listen_sock, __epoll_fd); // 3, 4
}

符合预期,因为文件描述符0,1,2已经在用了。
可以Accept了吗?
现在可以Accept了吗?下面这个代码可以吗?不可以!
void start() {
while (1) {
int sock = Sock::Accept();
}
}
你怎么知道sock上已经有数据了?
多路转接的原则:不知道有没有数据的时候,不要去调用IO接口!
所以我们要:先将listen套接字添加到epoll中,让epoll去管理!
所以其实,epoll_server中的epoll模型,其实管理了两种sock,第一个叫做监听套接字,第二种叫做连接的套接字。
连接的套接字是越来越多的,但是listensock只有一个!epoll两种套接字都要管理!总结来说,多路转接中,任何文件描述符,都应该被管理!
怎么让epoll管理文件描述符呢?
认识一个接口。

参数:一句话搞定:让epfd这个epoll模型管理fd这个文件描述符,当fd中有event事件发生的时候,让epfd帮这个fd做op这个动作!
事件有哪些?可以查表。
常用的有这些。
- EPOLLIN: 表示对应的文件描述符可以读(包括对端SOCKET正常关闭);
- EPOLLOUT: 表示对应的文件描述符可以写;
- EPOLLPRI: 表示对应的文件描述符有紧急的数据可读(这里应该表示有带外数据到来);
- EPOLLERR: 表示对应的文件描述符发生错误;
- EPOLLHUP: 表示对应的文件描述符被挂断;
- EPOLLET: 将EPOLL设为边缘触发(Edge Triggered)模式,这是相对于水平触发(Level Triggered)来说的.
- EPOLLONESHOT: 只监听一次事件,当监听完这次事件之后,如果还需要继续监听这个socket的话,需要再次把这个socket加入到EPOLL队列里。
所以epoll.hpp这样写。
static bool control_epoll(int epfd, int oper, int sock, uint32_t events) {
struct epoll_event ev;
ev.events = events;
ev.data.fd = sock;
int n = epoll_ctl(epfd, oper, sock, &ev);
return n == 0;
}
epoll_sever.hpp这样调用。
__epoll::control_epoll(__epoll_fd, EPOLL_CTL_ADD, __listen_sock, EPOLLIN);
表示把__listen_sock这个fd ADD到epoll模型中,关心这个fd的EPOLLIN事件。
此时可以调用epoll_wait去让epoll关心这些文件描述符了
当然到后面就绪的文件描述符可能很多,所以我希望一次性可以拿完所有就绪的文件描述符。
所以在epoll_server.hpp里面维护一个
struct epoll_event* __revs; // 后面epoll继续的元素都会被放在这里
int __revs_num; // __revs的大小
先把数组空间开好,然后到时候就绪的一起都拿出来。
epoll.hpp
static int wait_epoll(int epfd, struct epoll_event revs[], int num, int timeout) {
return epoll_wait(epfd, revs, num, timeout);
}
epoll_server.hpp
void loop_once(int timeout) {
/**
* timeout表示,外部决定,到底这个epoll_wait最多阻塞多久,可以选择不阻塞,可以选择阻塞的事件
*/
int n = __epoll::wait_epoll(__epoll_fd, __revs, __revs_num, timeout);
switch (n) {
case 0:
logMessage(DEBUG, "timeout ...");
break;
case -1:
logMessage(WARNING, "epoll wait error; %s", strerror(errno));
break;
default:
// epoll这一次成功等到了就绪的fd了!
break;
}
}
void start() {
int timeout = 1000;
while (true)
loop_once(timeout);
}
当timeout为0的时候,叫做非阻塞等待!当timeout为-1的时候,叫做阻塞式等待!
一次loop_once就应该这样写,如果wait_epoll成功了,就表明这一次loop等到了就绪的文件描述符!
一些细节
细节1: 如果底层就绪的sock非常多,revs放不下了,怎么办?
不影响,一次拿不完就下一次loop再拿就行!
细节2: 关于epoll_wait返回值的问题
表示有几个fd上的事件就绪,就返回几
但是epoll_wait的处理特别特别的优雅,epoll返回的时候,会将所有就绪的fd按照顺序放到revs数组中!一共有返回值个!很优雅!
进行一次测试
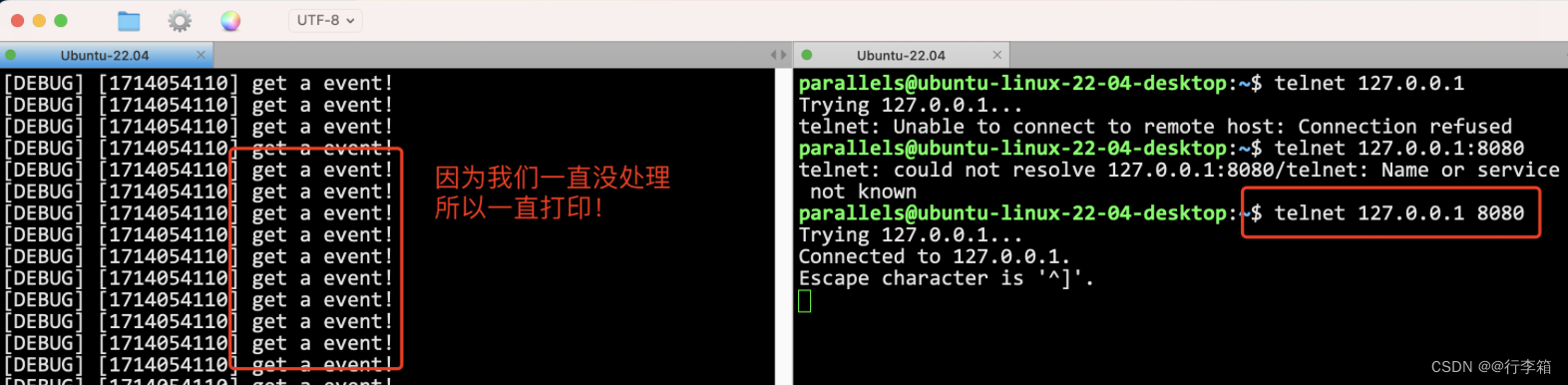
因为我们一直没处理这个继续的套接字,所以一直打印!
怎么处理,我们搞一个handler_event(n)就可以了!只需要传一个数字,告诉我处理几个就行了,因为东西都存在revs数组里面了!
epoll_server.hpp
void handler_event(int n) {
for (int i = 0; i < n; i++) {
uint32_t revents = __revs[i].events;
int sock = __revs[i].data.fd; // 这个就是就绪(什么事件就绪呢,看下面)的文件描述符!
// 此时如果我去对这个fd做访问,一定不会阻塞
// 如果是listensock,就去accept,此时accept不会阻塞!
// 如果是普通的sock,那我们就读取发过来的信息就好了!
// 读事件就绪了!
if (revents & EPOLLIN) {
// 1. listensock 就绪
// 2. 普通的sock就绪 - read
if (sock == __listen_sock)
Accepter();
else
Recver();
}
}
}
Accepter和Recver
void Accepter(int listen_sock) {
// accept这个监听套接字
}
void Recver(int sock) {
// 读取这个普通套接字里面的内容
}
Accepter这样写
void Accepter(int listen_sock) {
// accept这个监听套接字
std::string client_ip;
uint16_t client_port;
int accept_errno = 0;
int sock = Sock::Accept(listen_sock, &client_ip, &client_port, &accept_errno);
if (sock < 0) {
logMessage(WARNING, "accept error!");
return;
}
// 此时能不能直接读取?不能,因为并不清楚是否有数据!
// 交给epoll!
if (__epoll::control_epoll(__epoll_fd, EPOLL_CTL_ADD, sock, EPOLLIN)) {
logMessage(DEBUG, "add new sock: %d to epoll", sock);
} else {
return;
}
}
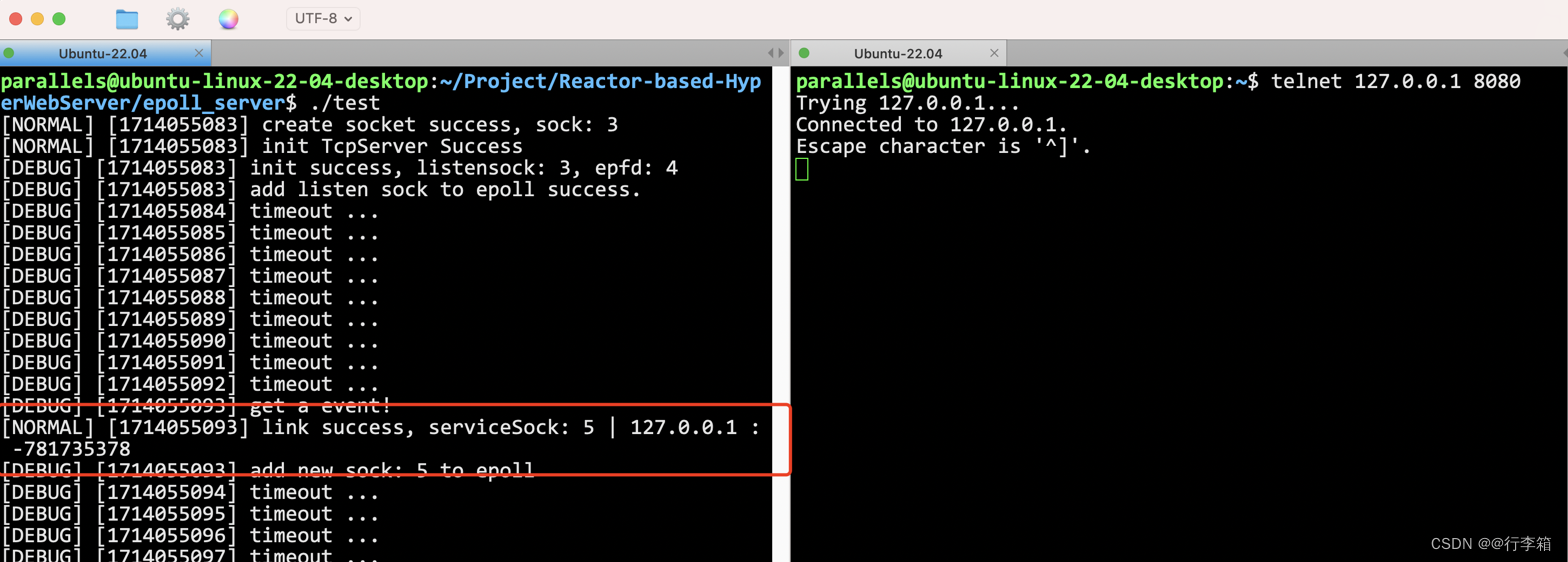
总之,成功Accept上来的sock是不能直接读取的!因为不知道有没有数据!所以交给epoll就行!
测试一下。
Recver这样写
void Recver(int sock) {
// 读取这个普通套接字里面的内容
// 1. 读取数据
// 2. 处理数据
char buffer[10240];
size_t n = recv(sock, buffer, sizeof(buffer) - 1, 0);
if (n > 0) {
// 假设这里就是读到了一个完整的报文
buffer[n] = 0;
__handler_request(buffer); // 进行回调!
} else if (n <= 0) {
// 对端关闭文件描述符
// 让epoll不再关注这个文件描述符
// 一定要先从epoll中去掉,才能close文件描述符
bool res = __epoll::control_epoll(__epoll_fd, EPOLL_CTL_DEL, sock, 0);
assert(res); // 保证是成功的,因为一般来说都是成功的,所以直接assert
(void)res;
close(sock);
if (n == 0)
logMessage(NORMAL, "client %d quit, me quit too ...", sock);
else if (n < 0)
logMessage(NORMAL, "client recv %d error, close error sock", sock);
}
}
这里有坑!一定要先从epoll中去掉,才能close,因为epoll中的fd都是合法的!
把回调方法搞好之后,epoll服务器我们就搞定了
main.cc
void change(std::string request) {
// 完成业务逻辑
std::cout << "change: " << request << std::endl;
}
int main() {
std::unique_ptr<ns_epoll::epoll_server> svr(new ns_epoll::epoll_server(change));
svr->start(-1); // 先暂时让他阻塞等待
return 0;
}
epoll服务器最终测试
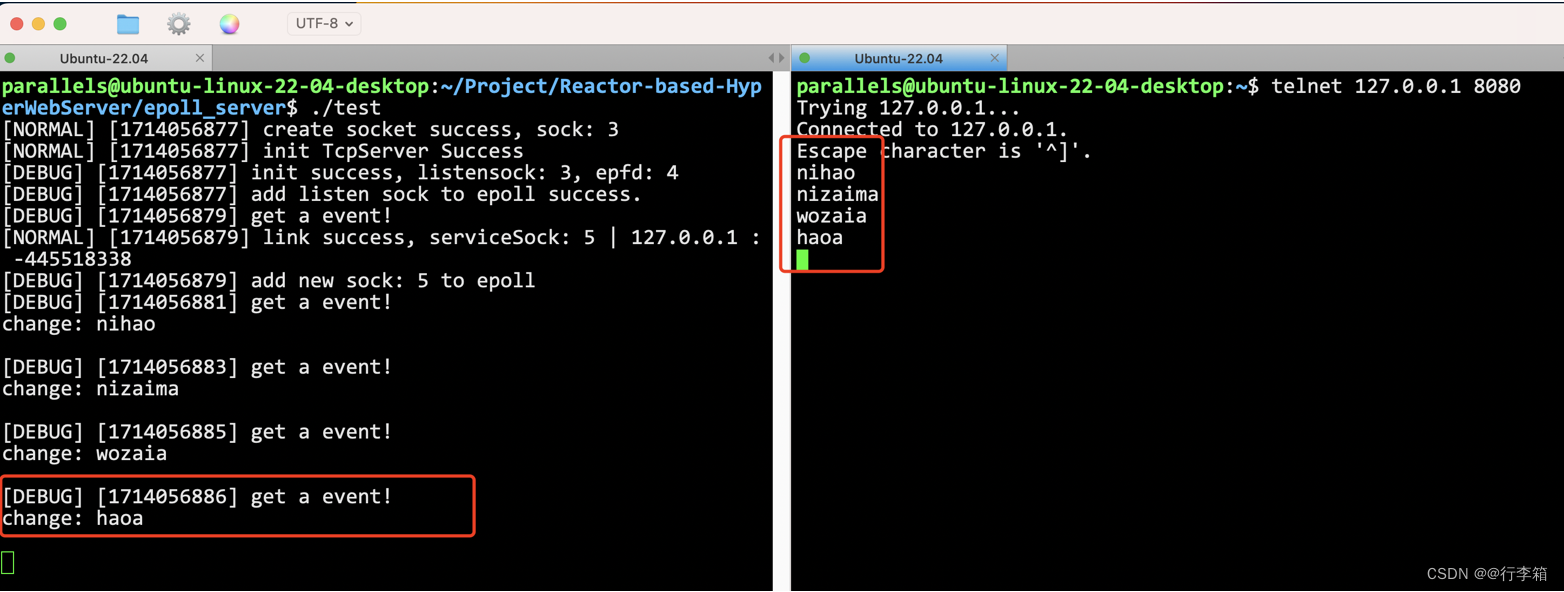
epoll服务器回调了方法。
这个epoll服务器没有问题吗?
肯定还是有问题的。
首先,如何保证Recver读到了完整的报文,这些都很熟悉了,都是要去解决的问题!
多路转接的工作模式
基本概念
epoll有两种工作模式,水平触发(LT)和边缘触发(ET)
LT模式: 如果我手里有你的数据,我就会一直通知
ET模式: 只有我手里你数据是首次到达,从无到有,从有到多(变化)的时候,我才会通知你
细节:
- 我为什么要听ET模式的?凭什么要立刻去走?我如果不取,底层再也不通知了,上层调用就 无法获取该fd的就绪事件了,无法再调用recv, 数据就丢失了。倒逼程序员,如果数据就绪, 就必须一次将本轮就绪的数据全部取走。
- 我可以暂时不处理LT中就绪的数据吗?可以! 因为我后面还有读取的机会。
- 如果LT模式,我也一次将数据取完的话,LT和ET的效率是没有区别的。
ET模式为什么更高效?
- 更少的返回次数(毕竟一次epoll_wait都是一次内核到用户)
- ET模式会倒逼程序员尽快将缓冲区中的数据全部取走,应用层尽快的去走了缓冲区中的数据,那么在单位时间下,该模式下工作的服务器,就可以在一定程度上,给发送方发送一 个更大的接收窗口,所以对方就可以拥有一个工大的滑动窗 口,一次向我们发送更多的数据,提高IO吞吐。
为什么ET模式一定要是非阻塞的读取才行
结论:et模式一定要是非阻塞读取。为什么?
首先,et模式要一次全部读完!怎么才能一次读完呢?我都不知道有多少,怎么保证一次读完?所以我们要连续读,一直读!循环读!读到没有数据为止!
ok!读到没有数据, recv就会阻塞!这就不行了,我们不允许阻塞!
所以怎么办?把这个sock设置成非阻塞的sock,这种sock有个特点:一直读,读到没数据了,不阻塞!直接返回报错,报一个错误:EAGAIN。而这个EAGAIN,可以告诉我们,读完了!